�y�T(m��n)늄�(d��ng)��(zh��)�ЙC(j��)��(g��u)�Йz�y(c��)ģ�K���O(sh��)Ӌ(j��)
������B��һ�N�����y�T(m��n)늄�(d��ng)��(zh��)�ЙC(j��)��(g��u)�Йz�y(c��)ģ�K��Ӳ����ܛ���O(sh��)Ӌ(j��)���z�y(c��)ģ�K����������MSP430��늄�(d��ng)��(zh��)����DSP����ģ��քe�z�y(c��)�Դ��늙C(j��)���y�T(m��n)�ĸ���(g��)�\(y��n)�Ѕ���(sh��)���Ɍ�(sh��)�r(sh��)�O(ji��n)�y(c��)�y�T(m��n)늄�(d��ng)��(zh��)�ЙC(j��)��(g��u)�Ĺ�����B(t��i)��
1������
�����y�T(m��n)�ǹܵ�ݔ��ϵ�y(t��ng)�е���Ҫ�������V����(y��ng)���������������ʯ�ͺ�ұ����ИI(y��)����(du��)ϵ�y(t��ng)�����������͜ضȵȅ���(sh��)�M(j��n)���{(di��o)��(ji��)��늄�(d��ng)��(zh��)�ЙC(j��)��(g��u)�ǿ��ƺ��(q��)��(d��ng)�y�T(m��n)����Ҫ�b�ã��nj�(du��)�y�T(m��n)��(sh��)�F(xi��n)�h(yu��n)�̿��ơ����п��ƺ��Ԅ�(d��ng)���Ƶ�һ�N�ز����ٵĈ�(zh��)�в������S���C(j��)�һ�w�����g(sh��)�İl(f��)չ��늄�(d��ng)��(zh��)�ЙC(j��)��(g��u)�ڹ��I(y��)���a(ch��n)���w�F(xi��n)����ă�(y��u)��(sh��)���y�T(m��n)늄�(d��ng)��(zh��)�ЙC(j��)��(g��u)�Ŀɿ������x���_(k��i)�z�y(c��)ģ�K�����ܺú�����(w��n)���ɿ��ęz�y(c��)ģ�K��(du��)�y�T(m��n)늄�(d��ng)��(zh��)�ЙC(j��)��(g��u)�İ�ȫ��(w��n)���\(y��n)�����P(gu��n)��Ҫ��
2��ϵ�y(t��ng)����ԭ��
�����y�T(m��n)늄�(d��ng)��(zh��)�ЙC(j��)��(g��u)(�D1)��Ҫ���˙C(j��)�ӿڡ���������늄�(d��ng)��(zh��)�����͙z�y(c��)ģ�K�M�ɡ��˙C(j��)�ӿ���Ҫ����Һ���@ʾ�����Iݔ����h(yu��n)���b��ݔ�롣늄�(d��ng)��(zh��)������Ҫ������(sh��)����̖(h��o)̎����(DSP) �����ܹ���ģ�K(IPM)�ͮ���늙C(j��)���z�y(c��)ģ�K�����Դ�z�y(c��)��늙C(j��)�z�y(c��)���y�T(m��n)�z�y(c��)3���֡�
�����˙C(j��)�ӿڿ��O(sh��)���\(y��n)�Ѕ���(sh��)����������l(f��)�Ϳ�����̖(h��o)��ͬ�r(sh��)���@ʾ�b�÷����ĸ��N��Ϣ����Ɍ�(du��)ϵ�y(t��ng)�Č�(sh��)�r(sh��)�O(ji��n)�ء������������˙C(j��)�ӿڰl(f��)�́�(l��i)�Ŀ�����̖(h��o)������(j��)������̖(h��o)����늄�(d��ng)��(zh��)��������������(sh��)�r(sh��)�z�y(c��)�y�T(m��n)��λ�ú��г̵ȷ�����̖(h��o)���{(di��o)������(y��ng)�Ŀ���ָ�����������Ɍ�(sh��)�r(sh��)���˙C(j��)����l(f��)���N������B(t��i)�������\����̖(h��o)��늄�(d��ng)��(zh��)��������Ҫ�Ĉ�(zh��)�ЙC(j��)��(g��u)��DSP ���տ�������ָ�ͨ�^(gu��)ʸ�����Ƽ��g(sh��)�(q��)��(d��ng)����늙C(j��)��늙C(j��)ݔ���S��(j��ng)�X݆�p�ٺ��τ�(d��ng)�y�T(m��n)���]��
�����z�y(c��)ģ�K�քe��(du��)�Դ��늙C(j��)���y�T(m��n)�Ĺ�����B(t��i)�M(j��n)�Йz�y(c��)�������z�y(c��)���ĸ��N��̖(h��o)��(j��ng)�^(gu��)׃�Q��׃�ɿ����������R(sh��)�e�Ĕ�(sh��)����̖(h��o)���Դ�z�y(c��)��Ҫ�M(j��n)���Դȱ���z�y(c��)������늙C(j��)�(q��)��(d��ng)늉�������z�y(c��)��IPM ģ�K�ضșz�y(c��)��늙C(j��)�z�y(c��)��Ҫ�M(j��n)��늙C(j��)�D(zhu��n)�ٙz�y(c��)��늙C(j��)�D(zhu��n)��λ�Ùz�y(c��)���D(zhu��n)�ؙz�y(c��)��늙C(j��)���X݆��Ĝضșz�y(c��)���y�T(m��n)�z�y(c��)��Ҫ�M(j��n)���y�T(m��n)λ�Ùz�y(c��)���y�T(m��n)�г̙z�y(c��)���Դ�z�y(c��)��늙C(j��)�z�y(c��)����̖(h��o)�����oDSP�M(j��n)��̎�����y�T(m��n)�z�y(c��)����̖(h��o)�����o������MSP430�M(j��n)��̎����
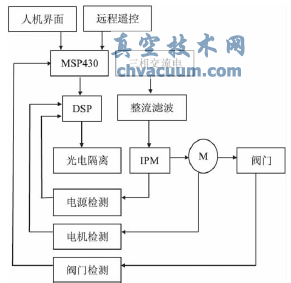
�D1 �y�T(m��n)늄�(d��ng)��(zh��)�ЙC(j��)��(g��u)�ĽY(ji��)��(g��u)
3���z�y(c��)ģ�KӲ���O(sh��)Ӌ(j��)
�����z�y(c��)������Ҫ�əz�y(c��)�·������������늄�(d��ng)��(zh��)�����е�DSP��(sh��)�F(xi��n)��
����3.1����������
����������������16λ�����ġ�����(ji��n)ָ���Ƭ�C(j��)MSP430����Ƭ�C(j��)��(y��ng)̎��������(qi��ng)���\(y��n)���ٶȿ죬Ƭ��(n��i)����FLASH�惦(ch��)����16λA/D��ͨ�Žӿڵȡ�
����3.2��늄�(d��ng)��(zh��)����DSP
����늄�(d��ng)��(zh��)����DSP���ö��c(di��n)32λоƬTMS320F2812��оƬ��(y��ng)�\(y��n)��������(qi��ng)���������S�������O(sh��)��
����3.3���Դ�z�y(c��)
�����Դ�z�y(c��)�����Դȱ���z�y(c��)��늉��z�y(c��)������z�y(c��)��IPMģ�K�ضșz�y(c��)��
����(1)�Դȱ���z�y(c��)
�����Դȱ���z�y(c��)��Ҫ�ɹ����74LS123��(sh��)�F(xi��n)��74LS123��һ�N�p�����|�l(f��)�η�(w��n)�B(t��i)���C��ʎ����ȡ�����Դ��A��C����һ�M��B��C����һ�M���քe����ɂ�(g��)�����ݔ��ˣ������ݔ���ӵ�74LS123�ϡ���74LS123��ݔ����B(t��i)���Д������Դ��ȱ����r��
����(2)늉��z�y(c��)
����늉��z�y(c��)���û���늉�������ģ�KVSM025A������������һ���ı�����ݔ�������늉�׃��ݔ����ݔ����늉���̖(h��o)��(j��ng)�V������̖(h��o)�{(di��o)����׃��0�� 3.3V��늉���̖(h��o)����DSP��A/D�ɘ�ݔ��ͨ�����Ķ��@�î���늙C(j��)����ݔ��늉��ķ�����̖(h��o)��
����(3)����z�y(c��)
��������z�y(c��)�������������LTS25-NP������������һ���ı�����IPMݔ�����������׃����߅��ݔ���������̖(h��o)��(j��ng)�^(gu��)�ɘ�����D(zhu��n)�Q��늉���̖(h��o)���ٽ�(j��ng)�^(gu��)�V�����m��(d��ng)?sh��)����?h��o)�{(di��o)����׃��0��3.3V������(n��i)��늉���̖(h��o)����DSP��A/D�ɘ�ݔ��ͨ�����Ķ��@�î���늙C(j��)���ඨ������ķ�����̖(h��o)��
����(4)IPMģ�K�ضșz�y(c��)
����IPM ģ�K�ضșz�y(c��)���Æο���(xi��n)��(sh��)�֜ضȂ�����DS18B20��ԓ�������o(w��)���ⲿԪ�������Æθ���(sh��)��(j��)����(xi��n)��늣��y(c��)�ؾ��Ȟ�0.5�� ���y(c��)���Y(ji��)����ɾ��̵ķֱ��ʞ�9�� 12λ�Ĕ�(sh��)����̖(h��o)���䔵(sh��)��(j��)����(xi��n)ֱ�ӽӵ�DSP��I/O���ϣ���DSP�xȡ�ض���̖(h��o)��
����3.4��늙C(j��)�z�y(c��)
����늙C(j��)�z�y(c��)����늙C(j��)�D(zhu��n)�ٙz�y(c��)���D(zhu��n)��λ�Ùz�y(c��)���D(zhu��n)�ؙz�y(c��)��늙C(j��)���X݆��Ĝضșz�y(c��)��
����(1)늙C(j��)�D(zhu��n)�ٙz�y(c��)
����늙C(j��)�D(zhu��n)��ͨ�^(gu��)��늾��a���z�y(c��)����ϵ�y(t��ng)����M���y(c��)��ԭ��������ijһ�ɘӕr(sh��)�g��(n��i)��ͨ�^(gu��)��(du��)�}�_��Ӌ(j��)��(sh��)��(l��i)�_��늙C(j��)�D(zhu��n)�ٵĴ�С����늾��a��ݔ����·��λ���90°���}�_��̖(h��o)���@��·�}�_��̖(h��o)����DSP���������a�·(QEP)�z�y(c��)�}�_��̖(h��o)�������أ�Ӌ(j��)��늙C(j��)���D(zhu��n)�١�
����(2)늙C(j��)�D(zhu��n)��λ�Ùz�y(c��)
����늙C(j��)�D(zhu��n)��λ�Ùz�y(c��)���ø߾��ȵ��λ�����λ��ݔ����̖(h��o)�ӵ�DSP��A/D�ɘ�ͨ���ϣ���DSPӋ(j��)��늙C(j��)�D(zhu��n)�ӵ�λ�á�
����(3)�D(zhu��n)�ؙz�y(c��)
�����D(zhu��n)�ؙz�y(c��)���ü��ɵ��D(zhu��n)������������������(zh��)�ЙC(j��)��(g��u)��ݔ���D(zhu��n)��ֱ���D(zhu��n)�Q������(y��ng)�����̖(h��o)��ԓݔ����̖(h��o)��(j��ng)�^(gu��)��̖(h��o)�{(di��o)�����D(zhu��n)�Q��DSP��A/Dݔ������S��ݔ��늉���������(j��ng)A/D�D(zhu��n)�Q��Ӌ(j��)�����(sh��)�H���D(zhu��n)��ֵ��
����(4)늙C(j��)���X݆��Ĝضșz�y(c��)
����늙C(j��)���X݆��Ĝضșz�y(c��)�����cIPMģ�K�ضșz�y(c��)��ͬ��
����3.5���y�T(m��n)�z�y(c��)
�����y�T(m��n)�z�y(c��)�����y�T(m��n)λ�Ùz�y(c��)���y�T(m��n)�г̙z�y(c��)��
����(1)�y�T(m��n)λ�Ùz�y(c��)
�����y�T(m��n)λ�Ùz�y(c��)���ø߾��Ȍ�(d��o)������λ������ֱ��ʸߣ�������늴ł������ĴŜ����Ԇ�(w��n)�}���λ���ăɶ˼�5Vֱ��늣���늙C(j��)�D(zhu��n)��(d��ng)�r(sh��)������(d��ng)�b�Î���(d��ng)�λ������(d��ng)����׃�λ�������ֵ��ʹ���(d��ng)�|�c(di��n)ݔ��0��5V��늉�����(du��)��(y��ng)�y�T(m��n)���_(k��i)�ȡ��λ����ݔ����̖(h��o)ֱ�ӽӵ�MSP430��Ƭ�C(j��)��A/Dݔ��ͨ����
����(2)�y�T(m��n)�г̙z�y(c��)
�����y�T(m��n)�г̙z�y(c��)���ö�Ȧ�^��(du��)ֵ���a�������a����ݔ��ֱ�ӽӵ���Ƭ�C(j��)MSP430��I/O���ϣ���Ƭ�C(j��)�xȡ���M(j��n)�ƴa��ͨ�^(gu��)Ӌ(j��)��õ��y�T(m��n)���г̔�(sh��)ֵ��
4���z�y(c��)ģ�Kܛ���O(sh��)Ӌ(j��)
�����z�y(c��)ģ�K���ܵ����Ì�(sh��)�F(xi��n)�����H��Ҫ������Ӳ���O(sh��)Ӌ(j��)��ܛ���O(sh��)Ӌ(j��)��(du��)ģ�K�Ĺ�������Ҳ�кܴ�Ӱ푡�ܛ���O(sh��)Ӌ(j��)�^(gu��)���г����]�`���ԡ��ɿ��Ժ�ͨ����֮�⣬߀Ҫ���C�ܺõČ�(sh��)�r(sh��)�ԡ�����ϵ�y(t��ng)��������������DSP��Ӳ���O(sh��)Ӌ(j��)�������Ҫ�քe�O(sh��)Ӌ(j��)����(g��)̎�����ij���
����4.1��MSP430�������O(sh��)Ӌ(j��)
����MSP430��Ƭ�C(j��)ؓ(f��)؟(z��)늄�(d��ng)��(zh��)�ЙC(j��)��(g��u)�������΄�(w��)�����������������Ҫ�M(j��n)��ϵ�y(t��ng)�ij�ʼ�������Ʒ�ʽ�x���y�T(m��n)λ�ú��г̙z�y(c��)�Լ��@ʾ�ȹ�������������ָ��\(y��n)�Ѕ���(sh��)ͨ�^(gu��)ͬ�����п�����DSP�У����w������D2��ʾ��
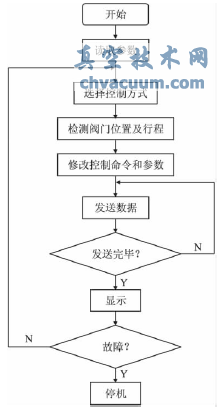
�D2 MSP430���������̈D
����(1)ϵ�y(t��ng)��ʼ��
����ϵ�y(t��ng)��늺������M(j��n)�г�ʼ���O(sh��)�ã�����I/O��ʼ����A/D��ʼ����SPI��ʼ���ȣ������EEP-ROM���xȡ�ϴ��\(y��n)���O(sh��)���ą���(sh��)ֵ�������г̳�ֵ���Kֵ���ٶȡ������Լ����Ʒ�ʽ�x���(bi��o)־λ�������@Щ����(sh��)���딵(sh��)��(j��)�Ĵ����С�
����(2)�x����Ʒ�ʽ
����MSP430 ����(j��)���Ʒ�ʽ��(bi��o)־���M(j��n)������(y��ng)�ij����֧�����x���Ʒ�ʽ�б����b�ؿ��ơ��ֲ��������Լ���(bi��o)��(zh��n)4��20mA�����̖(h��o)���ơ�3�N���Ʒ�ʽ�ɸ���(j��)��Ҫ�ɿ������ГQ���ГQ��ʽ��(ji��n)�οɿ���
����(3)λ�ú��г̙z�y(c��)
�����ɘ�λ�Â������ϵ�늉���̖(h��o)���@�È�(zh��)�ЙC(j��)��(g��u)��(d��ng)ǰλ�ã��c�o��λ���M(j��n)�б��^������(j��)�O(sh��)�������^(q��)���������ٶȅ���(sh��)�Լ��\(y��n)�И�(bi��o)־λ��
����(4)�l(f��)�͔�(sh��)��(j��)���������(sh��)�M(j��n)�д��аl(f��)�͡�
����(5)�@ʾ������̎��
����ÿ��(g��)��֧��ѭ�h(hu��n)�вɘ�λ�÷�����̖(h��o)�c�ϴβɘ�ֵ���^�����ֵ�D(zhu��n)�����}�_��(sh��)�(q��)��(d��ng)ָ����D(zhu��n)����(sh��)�r(sh��)���S�yλ��ֱ��늙C(j��)ֹͣ��ָᘱ�ָʾ��(d��ng)ǰλ�ã���늺���Ȼ�܉֣����D(zhu��n)�����ɲ�ֵ�ķ�̖(h��o)�Q������(d��ng)�z�y(c��)��������̖(h��o)�r(sh��)��ϵ�y(t��ng)ֹͣ�\(y��n)�С�
����4.2��DSP�������O(sh��)Ӌ(j��)
����DSP��Ҫؓ(f��)؟(z��)���տ���ָ���(q��)��(d��ng)늙C(j��)�������Ҍ�(sh��)�r(sh��)�z�y(c��)�Դ��늙C(j��)�Ĺ�����B(t��i)���{(di��o)��(ji��)����ָ��Д��Ƿ���F(xi��n)���ϡ�
����(1)�Դ�c늙C(j��)�z�y(c��)
����DSP ͨ�^(gu��)��A/D�ɘ�ͨ���z�y(c��)IPM늉��������늙C(j��)�D(zhu��n)��λ�ú��D(zhu��n)�أ��ɘӕr(sh��)�B�m(x��)�ɘ�4�κ���ƽ��ֵ���Դ˞V�����ָɔ_��늙C(j��)�D(zhu��n)�ٵęz�y(c��)��DSP���������a�·��(sh��)�F(xi��n)��ͨ�^(gu��)��һ�Εr(sh��)�g��(n��i)ӛ䛾��a��ݔ���}�_��������(g��)��(sh��)���Q���늙C(j��)���D(zhu��n)�١�ȱ���z�y(c��)�H��DSP�z�y(c��)������I/O�ڵęz�y(c��)�·�ߵ��ƽ����(l��i)�Д�ȱ����r���ضșz�y(c��)��DSPֱ���xȡ�ضȂ������Ĕ�(sh��)����̖(h��o)���ٓQ��ɜض�ֵ��
����(2)������
����DSPͨ�^(gu��)�z�y(c��)�Դ��늙C(j��)�ĸ���������(sh��)������(j��)�A(y��)���O(sh��)���ą���(sh��)�������ޣ��Дஔ(d��ng)ǰ�y�T(m��n)늄�(d��ng)��(zh��)�ЙC(j��)��(g��u)�Ƿ���F(xi��n)���ϣ��Լ����ϵ��(l��i)�ͣ�����������(y��ng)�Ġ�B(t��i)ָ��l(f��)�͵����������M(j��n)��̎����
����(3)��(sh��)��(j��)�l(f��)��
����DSP��ɹ����Д�������Д�Y(ji��)���Ġ�B(t��i)ָ��l(f��)�͵����������������������M(j��n)���@ʾ����ȡ����(y��ng)��(d��ng)����
5���Y(ji��)�Z(y��)
�����y�T(m��n)늄�(d��ng)��(zh��)�ЙC(j��)��(g��u)�ęz�y(c��)ģ�K��ϵ�y(t��ng)��Ӳ����ܛ���O(sh��)Ӌ(j��)�ϳ�ֿ��]�˹��I(y��)�F(xi��n)��(ch��ng)�Č�(sh��)�H�h(hu��n)������ȡ�����ƵĿ��ɔ_��ʩ���ϱ��o(h��)��ʩ�����������ϵ�y(t��ng)�Ŀɿ��ԣ�ʹϵ�y(t��ng)���m���ڸ��N���I(y��)�F(xi��n)��(ch��ng)�ĭh(hu��n)����