����ʸ������ԭ����늄ӈ��ЙC��
�������ˌ��F늄ӈ������ھ��_�ԡ��`���ȡ����ٷ����ͷ����Եȷ��棬������ʸ�����Ʋ��ԑ�����늄ӈ��ЙC��������ʸ�����Ʒ������Ɍ��F�����Ŀ���Ʒ�|��������ʸ��������Փ�OӋ��������늄��ЙC��������͌��`�Y���������������õĄ��o�B���ԡ�
1������
����늄ӈ��ЙC���ڿ���ϵ�y���ַQ��K�˿���Ԫ�������Ԅӿ���ϵ�y�в���ȱ�ٵ���Ҫ�M�ɲ��֡����������Դ���������ij�N������̖�����¹��������ṩֱ�������D�\�ӵ����b�á�
2��ʸ�����Ʋ���
2.1��ʸ��������Փ�����������׃�Q
����ʸ�������ڇ��H��һ���Q��ň��������(FieldOrientation)���༴�Ѵň�ʸ���ķ������������S�Ļ��ʷ���늄әC���ʸ���Ĵ�С���������˲�rֵ����ʾ��1971�꣬�ɵ����T�ӹ�˾��Blaschke���ˌ��@�Nһ�㻯�ĸ����γ�ϵ�y�Ľ���늄әC��ʸ������(TransvectorContrl)��Փ������Փ�Ͻ�Q�˽���늄әC�D�صĸ����ܿ��Ɔ��}��ʸ��������Փ�Ļ���˼���������ཻ��늄әC��ģ�Mֱ��늄әC�D�ؿ��Ƶ�Ҏ�ɡ�ͨ���ڴň����������ϣ������@�M�ڿ��gλ���ϻ���3π/2rad�Cе�Ƕȣ��O�������@�M��ͨ���������Q���������λ�ϻ���3π/2rad늽Ƕȣ��a���ĺϳɴň������������c��
����(1)�S���r�g�����ƣ��ϳɴň����S�������D�������׃һ�����ڣ��ň�Ҳ�����Dһ��;
����(2)�����D�^���У��ϳɴň����Ȳ�׃���ʷQ�A�����D�ň���
�������]�������Q�@�M�����ڿ��gλ���ϻ���“��ֱ”������3π/2rad늽Ƕ�;���ཻ׃�������λ�ϻ���3π/2rad늽Ƕȡ����������Q���ͨ��������Q�@�M���a���ĺϳɴň��������c�������D�ň�ͬ�ӵ����ԡ���������D�wR�Ϸ���2���є���ȡ����ഹֱ��ֱ���@�MM��T����D1��ʾ��
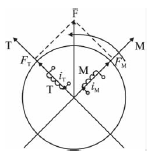
�D1 ����ֱ�����D�@�Mʾ��D
�����t��2���@�M�ȷքeͨ��ֱ�����iM��iT�r�������ĺϳɴň���Ȼ�Ǻ㶨�ň�������{���κ�һ��ֱ�����(iM��iT)���t�ϳɴň��Ĵň�����Ҳ�õ����{������R���D�r�����@�Mͬ�r��ͬ���D�����D���ϳɴńӄݮa���ĺϳɴ�ͨҲ�����D���˺㶨�ň����ӿ��g�γ�һ���Cе���D�ň������cǰ���B�����ࡢ�����@�M�a���Ĵň���ȫ���Ե�Ч�����^����վ���F���Ϻ��@�Mһ�����D�r�������Č���2��ͨ��ֱ���ġ����ֱ�Ĺ̶��@�M�������ȡ�a����ʩ�a�����@�MT�a���Ĵńӄ�FT��늄әC������ֻͨ��M�@�M�a��������iM�����ȡ���T�@�M�����iT�ʹň�Φ���Ì��a�����D�����Сֻ�c���iT�����ȣ��@�cֱ��늄әC�D�خa����ԭ���dz����ƣ��õ����o�ӑB��������ȫ�܉��cֱ���{��ϵ�y�������Ľ����{��ϵ�y����ˣ���회�늄әC�ą�������ϵ�M��׃�Q��
2.2��ʸ�����ƵČ��F
�������о�ʸ�����ƕr�����x�����N����ϵ�y���������ൽ������oֹ����׃�Q(3s/2s׃�Q)�͏ă����oֹ���������D������׃�Q(2s/2r׃�Q)��
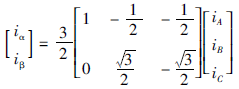
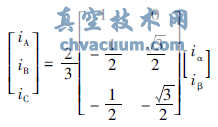
����һ�����Dʸ��i�����ඨ��A-B-C����ϵ׃�Q�����ඨ��α-β����ϵ���Q��Clarke׃�Q��Ҳ����3s/2s׃�Q��������ʽ��ʽ(1)��
������ԭ��ʾ��D��D2��ʾ��
�D2 CLARKE׃�Qʾ��D
��������׃�Q����Clarke��׃�Q��2/3׃�Q���ʽ��ʽ(2)��
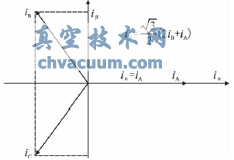
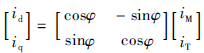
����һ�����Dʸ��i��d-q��ֱ����ϵ׃�Q��M-T��������ϵ���Q��Park׃�Q��Ҳ������/ֱ׃�Q��������ʽ��ʽ(3)��
������׃�Qԭ��D��D3��ʾ��
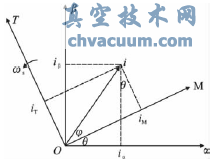
�D3 PARK׃�Qʾ��D
��������׃�Q����Park��׃�Q��ֱ/��׃�Q�ľ����ʽ��ʽ(4)��
3��ϵ�y�Ļ�������ʽ�ͽY����D
��������o������늄әC������ͬ�������D�����D�Ӵň������M��T���˵Ĕ��Wģ�͡�
����(1)늉�����
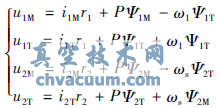
����(2)��朷���
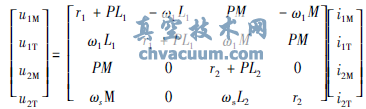
����(4)늴��D�ط���
�������ϸ�ʽ�У�r1��r2�鶨�D�����;L1��L2�鶨�D���Ը�;M�鶨�D�ӻ���;u1M��u1T��u2M��u2T��M��T�S���D��늉�;ωs���D����l��;ω1��ͬ�����D���l��;T��늴��D��;i1M��i1T��i2M��i2T��M��T�S���D�����;PN��늄әC�O����;Ψ1M��Ψ1T��Ψ2M��Ψ2T��M��T�S���D�Ӵ��;P��������;Ψ2���D�Ӵ�朡�
������������늄әC׃�l�{��ʸ������ϵ�y�ĽY����D��D4��ʾ���D�����Ϙ˵Ŀ�������ָ��ֵ�������錍�Hֵ�����Ȍ����ٶ�ָ��ω*��ω��ƫ����̖e�����ٶ��{��������ݔ������T*ָ��������ʸ�����ƻ�������ʽ�����T*��i*1M��i*1T��Ψ2��ωs�����^һϵ������׃�Q���ɵõ��������ָ��I*a��I*b��I*c��������{�����֣������ָ��ͽ�����ʽ����������z�y�����r�������^��ƫ����������{��������ݔ����̖�ͽoIGBT��׃���_��׃�l�{�ٵ�Ŀ�ġ�
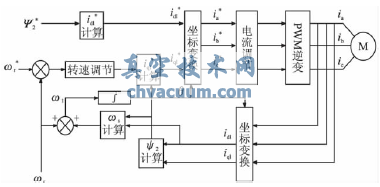
�D4 ׃�l�{��ʸ������ϵ�y�ĽY����D
4������MATLAB��׃�l�{��ʸ�����Ƶķ���
�������Ϲ��ƌ���ʸ������ϵ�y�Ļ�������ʽ���Լ���������늄әC׃�l�{��ʸ������ϵ�y�ĽY����D���ɵó���Simulink�еķ���Y���D����D5��ʾ��
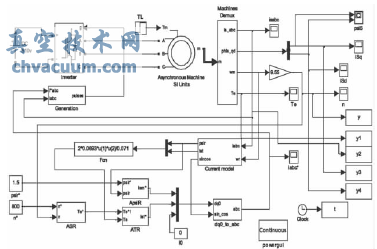
�D5 Simulink�еķ���Y���D
������Simulink�ķ���Y���D�У�ϵ�y�ٶ��{����(ASR)��ݔ����̖���D�ؽo��T*e����Ȳ��������D6��ʾ�������D�����O��300��Kp�O��12��Ki�O��24��
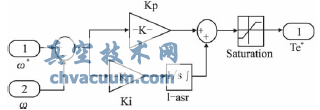
�D6 ϵ�y�ٶ��{������ģ�K
��������{����(ACR)���F���H����S�o�������׃��������������h����ԭ��팍�F������{������A������������ԭ����D7�����o�����i*a�cݔ�����ia�M�б��^�����ƫ���ia���^±h�r�������h������HBC������׃��A����(����)��۵Ĺ�������������B��C�����ԭ��D���c����ͬ��
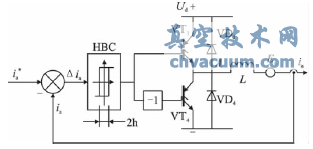
�D7 ������h���Ƶ�A��ԭ��D
������Ȳ�������D8��ʾ��
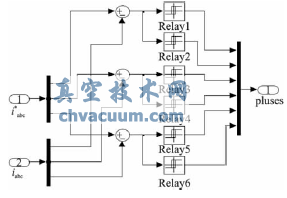
�D8 ϵ�y����{������ģ�K

�D9 늙C�yԇ��̖������
�������h�����O��20��
�����ڷ����^�����õ���늙C�yԇ��̖������(Ma-chinesMeasurementDemux)����D9���ڷ����^���У��x��늄әC�D�١�늄әC�Cе�D�ء����ඨ�������ͬ��d-q�����µ�q�S�µĶ��Ӵ�ͨ��d�S�µĶ��Ӵ�ͨ��ݔ����̖��
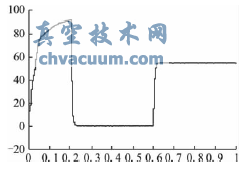
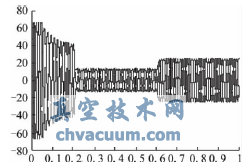
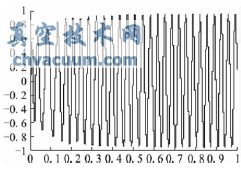
��������늙C������������\ʽ����늄әC����늉�380V;�~���l��50Hz;���Ӄ���0.435Ω;����©��0.004mH;�D�Ӄ���0.816Ω;�D��©��0.004mH;����34.7mH;�O������4�����淽���x���̶����L(fixed-step)������r�g�O��0��1s���õ���늄әC�D�١�늄әC�Cе�D�ء����ඨ�������ͬ��d-q�����µ�q�S�µĶ��Ӵ�ͨ��d�S�µĶ��Ӵ�ͨ��푑�������D10��14��ʾ��
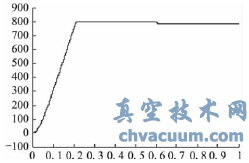
�D10 늄әC�D��푑�����
�D11 늄әC�Cе�D��푑�����
�D12 ���ඨ����������D
�D13 q�S�µĶ��Ӵ�ͨ푑�����
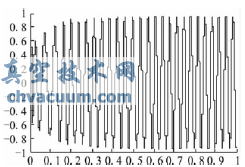
�D14 d�S�µĶ��Ӵ�ͨ푑�����
4���Y���Z
�������ď�ʸ�����ƵĻ���ԭ��������늙C�Ĕ��Wģ���Լ�����Matlab/Simulink���߳��l��������ʸ������ϵ�y�ķ���ģ�Ͳ�����Y���M���о����о��Y�����������D�Ӵ�朶���Į���늄әCʸ������ϵ�y���ЄӑB���ܺá��{�ٷ������ă��c���������ό��Y�����������挍�F��ʸ�������㷨���ڮ�������늙C�ӵđ����ϣ��oՓ�ǿ���늙C���ٶȣ�߀�ǿ���λ�ã�Ч���������롣