����늄ӈ���������׃�l���Ƽ��g�C��
�����S�������Ӽ��g���C���Ƽ��g����Ӽ��g�ȬF���ƌW�İlչ������늄ӈ�����������Ƽ��g�ɞ��ˬF��늄ӈ��ЙC���İlչ���������ȽY�����P�aƷ�đ�����r��B������늄ӈ�����������F��;��κ��ν�B������늄ӈ������ĽM�ɼ���������ԭ��;Ȼ���B��׃�l�{�ٿ��Ƽ��g�в��õĎNPWM���Ƽ��g;�������늄ӈ�����������Ƽ��g�İlչڅ���M��չ����
�������I���a�^���Ԅ��{��ϵ�yһ���əz�y�����{���������������{������M�ɣ����Ј������Dz���ȱ�ٵ���Ҫ�M�ɲ��֣����鹤�I�^�̿���ϵ�y�нK�ˮaƷ�������Ԅӿ���ϵ�y�аl�]�������aƷ������������á��S���������w�ٰlչ���Ԅӻ��̶ȵ���ߣ����������÷�����Խ��Խ�V�����ѽ��������ʯ�͡�������ұ���վ���I��lչ��ʳƷ����ˎ����Դ����ˮ���h�����Ԅӿ����I���Ҍ������������H�����Ͼ���Ʒ�N��Ҏ��Ҫ��ҲԽ��Խ�ߣ��@�������������ܡ��m�÷�������˸��ߵ�Ҫ��[1��2]�����S����Ӽ��g�������Ӽ��g���C���Ƽ��g�Լ�ͨ�ż��g�ȬF���ƌW�İlչ�����������P��I���о��C���L�ڌ����ЙC���ĸ��M�о�����u�γ����Զ�ܡ����ܻ����h�̿��ơ��������\��ȼ��g����Ҫ���c��������늄ӈ�������
1���҇��������lչ�F��
�����҇���20���o50���ĩ�_ʼ����ǰ�K�����µĚ���{���y�_ʼ�����^20���o60������ڵ��ИI�{������u�γ����҇��Լ��Ě���{���yϵ�ЮaƷ;20���o70���������u�_�l��DDZ-II��DDZ-III��늄ӈ�����[3];20���o80����ԁ����S�������Ӽ��g�İlչ���o�|�cDKJ�ͽ��г̺�DKZ��ֱ�г�늄ӈ��ЙC���M���Ј����@Ҳ���҇�����ġ�Ψһ���a��늄ӈ�����[4];20���o90��������x���x���ИI�M����DDZ-S�x���c���ЙC�������_�l���������F�˿��ƃx�����^�̿��ƵĔ��ֻ����g�������҇����I���g���A������ˮƽ����ƫ�ͣ��ڹ��I���a�^���е��Ԅӻ��̶ȱ��^�ͣ����Ԍ����ƃx���x����Ҫ���ձ鲻�ߣ��@�Ϳ��^����ʹһЩ�S�Ҳ����@��������Ͷ�Y���ټ��χ����ڽ�����һ�Εr�g�ț]���J�R���lչ���ЙC������Ҫ���x���C���@Щԭ���҇����ЙC���İlչ�ٶ��h�h������������ƃx�����ĸ��_���ԁ����������lչ�ٶȼӿ��˺ܶ࣬���Ǽ��g���M���ڿ��^�����Ђ��^�̵ģ�ֻ�����P�ļ��g��ȡ���M�����ܴ�ʹ����������İlչ����Щ���һЩ�S�Ҟ���Ƭ����Ч�棬ֻ���M����aƷ�M�b�������ļ��g�����ͼ��g�˲ŵ�������B�]�и��ϣ���ʹ���ȵ����P���g��ȇ������M���g���ʮ����ĕr�g��
����Ŀǰ�������Ў�ʮ�҈������S�̣������ڿ��ƾ��ȡ����ܻ�ˮƽ�Ͱ�ȫ���ܵȷ���̎���^�͵�ˮƽ����������Ҏģ�^��ďS�������x���ߏS���Ϻ��x��ʮһ�S���ؑc���xʮ�S���ďS�����B�����x��S���P���������S����ɽ�Ṥ�x��S�ȣ��������x���ߏS���ؑc���xʮ�S��늄ӈ������Č��I�S�̣��܉��ṩ����Ҏ���늄ӈ�������������ȇ��⣬Ʒ�NҎ��߀��������һ���]���γ�ϵ�л��������ڷ������˼��aƷ������h���ĮaƷ�ϻ�����߀��ȫ����Ҫ�ć����M�ڡ�
����������ͨ늄ӈ������������;���׃�l���ܵĈ�������������������ڇ��ȣ���׃�l���g�����ڈ������ϵďS���У��ؑc���xʮ�S�ļ��g�����ˇ����ڴ��ИI�����Mˮƽ��ԓ�S�����аl�������;���׃�l���Ƽ��g��늄ӈ��������܉F�p�����ء��ٶȵĪ������������{�����e����S9������ʽ���F��ƽ��ĄӑB��λ���g�������@����߽���늙C�Ķ�λ���Ⱥ�푑��ٶȡ�
2������������lչ�F��
������ȇ��Ȉ������ИI�ļ��g��������P�ИI�ڔ��ֻ������ܻ����W�j�����C�һ�w���ȷ���̎���I��ˮƽ���ڑ����I��Č��V�̶��ϣ����g��������ϣ��aƷҎ����̖�ȷ��涼�LJ������o������헱��ġ�
����Ŀǰ��������������׃�l���������棬��SIPOS������BERNARD��Ӣ��ROTORK������VALTEK�����܈��������a�S�̻���������ԓ�I����������Mˮƽ����Ҫ���F�����ׂ����c[5��6]��
2.1�����ܿ��ơ�
��������׃�l���Ƽ��g������늄ӈ�����׃�l���g�ĺ��ģ��������M�Ĉ��������������ܿ��Ƽ��g������VALTEK��˾��Starpac���ܻ��y�T늄��b����푑��ⲿ4~20mAģ�M��̖��Ȼ����RS-485ͨ�ſڰl���Ĕ�����̖�����������O���ą����M��PID����[7]��
2.2�����ұ��o���ܡ�
�������Ƶ������\��ܺ����ұ��o���ܿ��Ԝp�p���g�ˆT�Ĺ���������߮aƷʹ�É�������SIPOS5FLASHϵ�����܈�������������׃�l�b�úͿ��������صĽY����һ�𣬿�����늙C�г��M��ĩ�˵ĕr����ñ��^�͵��ٶȡ��@�ӣ�����늙C���X݆�Ą��ܽ��ͣ��p���˛_�����Ķ��������^���أ�ͬ�rҲ�����ˑT�Ԍ��y�T�ě_ײ��
2.3���S�����ھ��@ʾ���ܼ�ͨӍ���ܡ�
������ÿ�����M�����ܮaƷ��������LCD�@ʾ����Щ�aƷͬ�rҲ������LED�l��ָʾ��ͨӍ���ܿ���ʹ�����ߺ��аl�ˆT�ܷ�����ƙC������SIPOS5FLASHϵ�У����Է�����x��͵غ��h�̲���������ͨ�^RS232C���ڡ��F�������ȷ�ʽ�������O�ú��{ԇ��
2.4�����Ƶ����������\��ܡ�
�������܈��������������Д�aƷ���ϣ�ͨ�^LCD�F������ͨ�^LED�l����dz�����S���ˆT�������˹�������
2.5��׃�l�{�ټ��g��
����������׃�l�{�ټ��g���ڶ�λ���ȼ������ԡ������{�����ơ��������{����ݔ���D�غ��D�١��p�ق���ķN͔����ȷ����@ʾ�˃�Խ�����ܡ�
2.6��ģ�K���OӋ��һ�w���Y���OӋ��
��������һ�w���Y���OӋʹ������ϵ�y���OӋ�����b���������S�o�ȷ���������������ģ�K���OӋ���Ը������O����{ԇ�Ͳ�Q�����Ñ��ṩ�����ķ��㣬��ʡ���։ĵ���ȫ���O��ĸ��Q�������~���M���_֧��
3������늄ӈ������ĽM�ɼ���������ԭ��
�������y��늄ӈ����������������Σ������ŷ��Ŵ����͈��ЙC���Ϳ�����ɻ����Ĺ����OӋ������������늄ӈ�����Ҫ����˙C���������ܿ��ơ�ͨӍ��һЩ�������^���s�Ĺ��ܣ��@��Ҫ���ڂ��y늄ӈ������Ļ��A������һЩ�µ�ģ�K��֧���@Щ���ܡ�����늄ӈ������ĽY��ʾ��D��D1��ʾ��
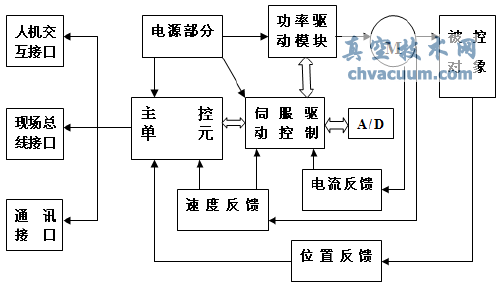
�D1 ����늄ӈ������Y��ʾ��D
�����ɈD1��֪�����܈������Ļ�������ģ�K��Ҫ�����؆�Ԫ���ӿ�ģ�K���Դģ�K��������ģ�K���ŷ��ӿ���ģ�K���z�y����ģ�K�M�ɡ�����늄ӈ��������؆�Ԫͨ�^����CAN�������͵���λ�C����Y����Ҫ�{�صČ���(���y�T)�ęz�y����������������̖������CPU����Ӌ��������ٶȿ�����̖��Ȼ��ԓ��̖�������ŷ��ӿ���ģ�K��������ģ�K��늙C�D�ӣ�ʹ���،���(�y�T)���_��������ĕr�g���_��һ��������λ�á�����늄ӈ����������ˬF������ͨ�ż��g���ŷ��Ŵ���������ģ�K�o��ϵ���������F�����؆�Ԫ�͈��ЙC�����p��ͨӍ���ھ��˶��������\�ࡢ���o�ȶ�N���ܣ��ܴ�̶�������˿��ƾ��Ⱥ��O���\�еİ�ȫ��[8��9]��
4�����܈�������׃�l���Ʋ���
��������늄әC׃�l�{�����ڬF����Ӽ��g���A�ϰlչ�������¼��g�����{�����ܱȂ��y��ֱ��늙C�{�ٸ���Խ�����{���{�١�׃�O�{�١������{�ٵȽ���늙C�{�ٷ�ʽ�����{��ƽ�����{�ٷ���������Ч�ʸߡ��Y�����Ρ��\�а�ȫ�ɿ��ȃ��ݡ�׃�l���g�����܈������еđ��ã��ڶ�λ���ȼ������ԡ������{�����ơ��������{����ݔ���D�غ��D�١��p�ق���ķN͔����ȷ����Mһ������ˈ����������ܺ��m����[10��11]��
��������PWM���g�����ڌ��F׃�l׃����ͬ�r���������C�������c�����ڽ��������I��õ��ˏV�����á�����늄ӈ������Ĉ��ЙC��һ����ý���늙C������PWM���Ƽ��g��늙C׃�l�{���еă������F���ʲ���PWM���Ƽ��gҲ�ͳɞ������܈�����׃�l���Ƽ��g�ĺ��ġ�
����������늉����Ƶ�SPWM����Ŀǰ�����^��V�������g���^�����PWM���Ƽ��g���@�N���Ƽ��gҪ����·�Y�����Ρ��ɱ��ͣ��܉�M��һ����ӵ�ƽ���{��Ҫ�����ڵ��l�A�Σ��ӑB�D���������o�B�{�����ܶ����ã�ϵ�y���ܲ��ߡ������Բ
����늉����gʸ��(SVPWM)���Ʒ�ʽ��һ�����������{�Ʋ��Σ��ԃ��ж�߅�αƽ��A�ķ�ʽ�M�п��Ƶġ��ں���Č��Hʹ���^���У��˂����������l���a�����g�����Ԝp���ٶȿ��Ƶ��`������@�N���Ʒ�ʽ�Ŀ����·�h���^�ಢ�қ]�������D���{�������Բ����@�N���Ʒ�ʽ��ϵ�y���]�Џĸ����ϵõ�����[12]��
����ᘌ����Ͽ��Ʒ�ʽ�������ϵIJ��㣬�����ʸ������׃�l�{�ٷ������@�N���Ʒ�������Ҫ˼����ͨ�^�y���Ϳ��Ʈ���늄әC�������ʸ���������ň�����ԭ�팦���������D������քe�M�п��ƣ���ͬ�r���ƃɷ����g�ķ�ֵ����λ�������ƶ������ʸ�����Ķ��_�������D�ص�Ŀ�ġ����ǣ��ڌ��H�đ����^���У������D�Ӵ�朲����לʴ_�^�y��늄әC�ą�����ϵ�y����Ӱ푱��^���ҵ�Ч��ֱ��늄әC����ʸ�����D׃�Q�^����s���@ʹ�ò���ԓ���Ʒ�ʽ�Č��H����Ч�����y�_����Փ����������Y��[13]��
����1985�꣬��������W��DePenbrock���������ֱ���D�ؿ���׃�l���g��ԓ�����Ļ���˼�����ڶ�������ϵ�·�������늄әC�Ĕ��Wģ�ͣ�����늄әC�Ĵ�机��D�أ�ʡȥ����ʸ��׃�l���Ƽ��g��ʽ�サ��늄әC��Ч��ֱ��늄әC�N�ď��sʸ�����D׃�QӋ�㣬Ҳ����Ҫ��������늙Cģ�ͣ��ںܴ�̶��Ͻ�Q��ʸ��׃�l���ƵIJ���[14]��
5���lչڅ��
�����κ�һ�N���g���M���������P�������g���M�������dz��o�ܵ��Pϵ�����ЙC���İlչҲ�x���_��Ӽ��g�������Ӽ��g���Ԅӿ��Ƽ��g���W�j���g���C�һ�w�����g�ȼ��g���M�������S�@�@Щ���P���g�İlչ�����܈��ЙC���İlչڅ�ݞ飺����׃�l���g��ģ�K���OӋ���g����Ч׃�l늙C�����Ӽ��g��S9�����ơ��ӑB��ƽ�ⶨλ���g�������\�༰���o���g���F���������g����늴Ÿɔ_���g���C�һ�w���Y�������ֿ��Ƽ��g�ȵ�[15��16]��
�����īI
����[1]�w��÷���Z���P����ū��.����늄ӈ������đ���[J].�Ї��x���x��.2004��24(6)��41-42.
����[2]�R��ҫ.늄ӈ��������Կ�ϵ�y�еİlչ������[J].ɽ������.2007��33(5)��185-186.
����[3]������.���o֮��Ԓ�Ԅӻ��x�����I[J].�Ԅӻ����[��2000��(1)6-9.
����[4]���e�㣬���ǹ�.늄ӈ������đ��ìF��lչڅ��[J].ɽ�|�p���WԺ�W��2007��21(3)��50-52.
����[5]C.R.PaulandKB.Hardin.Diagnosisandreductionofconductednoiseemissions.IEEETrans[J].Electromagn.Compat.��1988��30(4)��553-460
����[6]TingGuo��DanY.ChenandFredC.Lee.SeparetionoftheCommon-ModeandDif-ferential-ModeConductedEMINoise[J].IEEETRANSACTIONSONPOWERELEC-TRONICS��1996��11(3)��480-488.
����[7]����־�����A.늄ӈ��ЙC����׃�l�{�ٿ���[J].늙C�c���Ƒ��ã�2006.
����[8]��һ��SIPOS5FLASHϵ��׃�l������늄ӈ������C������[Z].2008.
����[9]��ƽ������������־Ƽ��.����늄ӈ����������c������[J].��Ӄx���x���Ñ���1999��6(2).
����[10]�S��Ӣ.�����y�T늄ӈ��ЙC�����о����_�l[D].���B������W�Tʿ�WλՓ��.2003��1-5.
����[11]�ܽ�������ϲ����־����.����׃�l늄ӈ��ЙC���lչ�F�����Ƽ��g�C��[J].������ˮ���W��2007��34(4)��93-96.
����[12]�f��������������ɽ.һ�N����SVPWM�{�Ʒ������о��c���F[J].ElecticalMeasure-ment&Instrumentation��2010��47(4).
����[13]�����������y������־.���ڿ��gʸ�����Ƶ�PWM׃�l�����о�[J].���������W�W��2008��27(4).
����[14]�����ᣬ��ٝ���������A.����늙Cֱ���D�ؿ���ϵ�ySVPWM�㷨�ĸ��M[J].̫ԭ������W�W��2010��41(3).
����[15]���F�壬��������.�����������ܿ��Ƴ�̽[J].�Ԅӻ��x����2004��25(1).
����[16]���G�A.����LonWorks�F������������늄ӈ��ЙC�����о�[D].�|�����̼��g��W��2006.