����늄ӈ�(zh��)����׃�l�{��ϵ�y(t��ng)���о�
��������늄ӈ�(zh��)�����ǹ��I(y��)�^�̿���ϵ�y(t��ng)��һ��ʮ����Ҫ�ĬF�����b�ã����Ќ��_�P����늙C(SRM)���M���ӵĄӑB(t��i)��λ���g����������늄ӈ�(zh��)������׃�l�{��ϵ�y(t��ng)�С���Ҫ��B�˻���SRM������늄ӈ�(zh��)�����{��ϵ�y(t��ng)��Ӳ���M�ɣ����c�U����ϵ�y(t��ng)��ܛ�����F����CCS3.1���_�l(f��)ƽ�_�M��ģ�K���OӋ����SRM�D��λ�ú�����M�Ќ��r�z�y�����D�ٺ�������涼�ܺܺõظ��S�o����ԓ�OӋ�����F�ѳɹ�����������늄ӈ�(zh��)������ȡ�������õĿ���Ч��������һ���Č��Ãrֵ��
����늄ӈ�(zh��)�����ǹ��I(y��)�^�̿���ϵ�y(t��ng)��һ��ʮ����Ҫ�ĬF�����b�ã�����Դȡ�÷��㡢���b�{ԇ���Σ��������ұ��ʯ�͡������ȹ��I(y��)���T�õ�Խ��Խ�V���đ��á�늄ӈ�(zh��)��������늄ӈ�(zh��)�ЙC�����{��(ji��)�y�ɲ��֣����ƾ�����Ҫ�Q����늄ӈ�(zh��)�ЙC���Ŀ������ܣ����܉�ϵ�y(t��ng)�Ŀ�����̖�D�Q��ݔ���S�Ľ�λ�ơ�ֱ��λ�ƣ������y�T�Ƚ�������λ�û������{��(ji��)�C����ʹ���ؽ��|��ϵ�y(t��ng)Ҫ���B(t��i)������
����늄ӈ�(zh��)���������ܻ��Ǯ�ǰһ�й��I(y��)�����O�������څ�ݣ��r������Ć�Ƭ�C��������̎������ȫ�������ģ�M�������������늄ӈ�(zh��)�����Ŀ��Ɔ�Ԫ���Ķ����F��ȫ���ֻ��Ŀ���ϵ�y(t��ng)��ȫ���ֻ��Č��F����ԭ�е�Ӳ������׃����ܛ�����ƣ��Ķ�������늄ӈ�(zh��)�����Б��ìF��������Փ�����M�㷨����߿������ܡ�
����SRM��������늄ӈ�(zh��)�����Ĉ�(zh��)��Ԫ����늄ӈ�(zh��)�����Ŀ��������cSRM���{��ϵ�y(t��ng)�������P��һ������SRM�{��ϵ�y(t��ng)�OӋ�������������늄ӈ�(zh��)���������������P��Ҫ��
1��SRM�{��ϵ�y(t��ng)Ӳ���M��
����SRM�{��ϵ�y(t��ng)��Ӳ���Y����D1��ʾ��
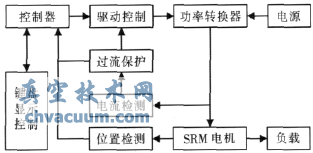
�D1 SRM�{�ٿ���ϵ�y(t��ng)Ӳ���Y���D
����SRM�{��ϵ�y(t��ng)��Ҫ�������Դ�·�������D�Q�����I�P�@ʾ�����·�����·��λ�Ùz�y�·���o���·�����،���SRM���Դ�·�������{��ϵ�y(t��ng)�ṩ��ܣ�����׃�Q��������D�Q�·��ԓ�·��Ҫ����SRM������ܣ�ͬ�r��һ�����_�P���ã�ʹSRM�ĸ����@�M�܉���Ҫ��ͨ�ࡣ�������x��16λ̎����TMS320LF2407�����o���I�P�@ʾ���ƣ�����TMS320LF2407̎�������������������ֵĺ��ġ�λ�Ùz�y�·��Ŀ���Ǵ_�������D�ӵ�����λ�ã�����λ����̖�����o߉�����·���Դ_���������@�M��ͨ�࣬ʹ��������}�_���������D��ͬ��������SRM�����\�Еr��������ز������\�з�ʽ��ͨ�^�{��(ji��)���@�M������������D�صĴ�С����ˣ�Ҫ���z�y����Ĵ�С;��SRM�ڸ����\�Еr���õ��ǽǶ�λ�ÿ����\�з�ʽ��ϵ�y(t��ng)ͨ�^�{��(ji��)���ƽǁ팍�F���D�صĿ��ƣ��˕r�M����������DZ������������˷�ֹ늙C�^�d���\�Еr����^����ܕ��������·�����N���������Լ�늙C���w��ɓp�������ԣ�����Ҫһ�����^�����o��ʩ��
2��SRM�{��ϵ�y(t��ng)ܛ���OӋ�c���F
���������е�ܛ���OӋ����DSP(TMS320LF2407)�R���Z�Ծ��̣�����ģ�K���OӋ�������˳���Ŀ��x�Ժ���ֲ�ԡ�ܛ���OӋ���΄���Ҫ������λ�òɘӡ�λ�ÿ��ơ��ٶȲɘӡ��ٶȿ��ơ�����ɘӡ�������ơ�������o����Ҫ���̈D��D2���D3��ʾ��
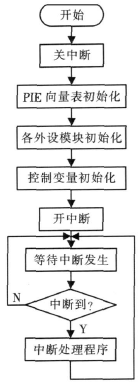
�D2 ���������̈D
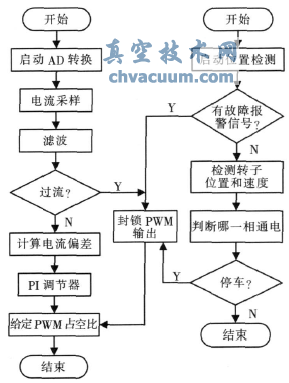
�D3 ����h(hu��n)��λ�íh(hu��n)���̈D
������������Ҫ���ϵ�y(t��ng)�ij�ʼ������ʼ��B(t��i)���@ʾ�Լ����ӡ��\���ӳ�����{�á���Ҫ�����ײ��ֽM�ɣ�
����(1)��ʼ����
��������TMS320LF2407�Ȳ����Ĵ����ij�ʼ�����¼�������������Ĵ����ij�ʼ�����Д�
������������ֳ�ʼ������CAP���@�Д�����ƽ�|�l(f��)��ʽ��PDPINT(�^���Д�)�ă�(y��u)�ȼ���ߣ��˕r��ֹȫ���Д࣬���P�]���е���ݔ����̖��
����(2)�Iֵ�Д��ӳ���
�����ɿ�����݆�������������D�����ӷ��D��ͣ܇���Ƅ���̖���Ӱ�������^�ء��^����Ƿ������̖���^һ����(y��u)�Ⱦ��a�����a���M��TMS320F2407��I/O�ڣ�DSP��������e��Ч��̖�ľ��a�D�벻ͬ�ķ�֧̎���ӳ����ڸ����ӳ������O���������P�Ę�־λ�����o�@ʾ�Ĵ����x���������@ʾֵ��
����(3)�Д�����ӳ���
�����Д���ճ�����Ҫ����λ�Ùz�y���ٶșz�y������z�y�����o������̎���ӳ����{��ϵ�y(t��ng)����Ҫ�漰λ�Ùz�y���ٶșz�y������z�y��
������ �D�ӵ�λ�Ùz�y
�����ʴ_��λ�Ùz�y�nj��F���_λ�ÿ��Ƶ�ǰ�ᣬֱ�ӛQ������������ϵ�y(t��ng)�ľ��ȡ��_�P����늄әC�{��ϵ�y(t��ng)��λ�Ùz�y�h(hu��n)��(ji��)��һ����Ҫ���ܾ���Ӌ���D�������څ���λ��(0°)��늽Ƕȣ������@������늽Ƕȁ��Д���һ���_ͨ����һ���P�ࡣλ�Â�����ݔ���ă�·λ����̖S1��S2��һ�����ڃ����ķN��ͬ�ĽM�ϣ����ղ�ͬ�ĽM�ό�һ��������ă�·λ����̖���֞��Ă���B(t��i)�����Ã�λ���M�ƾ��a�^(q��)�ֲ�ͬ�Ġ�B(t��i)������B(t��i)0(00)����B(t��i)1(01)����B(t��i)2(10)����B(t��i)3(11)��
����λ�Ùz�y���������i����һ�ε�λ����̖��Ȼ��z�y�µ�λ����̖;�Ķ����^�ɴΙz�y��λ����̖������l(f��)�Fλ����̖����ͬ���t�f��λ���ѽ���׃����ԓ�M�ГQ����ƣ�ͬ�rӋ��늙C�IJ������M�з������Д࣬���г̵�����;����ɴε�λ����̖��ͬ���t�f��λ�Û]�и�׃�^�m(x��)���ϴεĿ��Ʒ������ƣ��o���M�ГQ����ơ�
���������_�P����늄әC��ͬ�ڮ���늄әC�]���ԓQ����������횸����D��λ�Ùz�y����ݔ����̖���ȓQ�ࡣ�Q������ڲ��@�Д���ճ�������ɣ��ڲ��@�Д������̎�����xȡ�ɂ��D��λ�Ùz�y����ݔ���ƽ�������@�ɂ���̖�ĽM�ϾͿ��ԛQ����һ����ԓͨ늡�
������ �ٶșz�y
�����������У�����늙C�D�ٵĜy���Ƿdz��P�I�ġ�늙C�D�ٵĜy����Ҫ������ͨ�ö��r��T1��ͨ�^I/O���xȡλ�Â�������̖��ÿ15°��׃һ�Ρ��OӋ�r���r��1�Д��r�g�O��200μs����ɴ���׃���g�M���r��1�Д�ĴΔ���m���t늙Cÿ�DһȦӋ��ֵ��24×m������ĕr�g��24×m×200μs�������˔�ֵ���Ϳ���Ӌ������H늙C�D�١�����^�Q�㣬�Ϳ��Եó���λ��r/min��늙C���H�D��n��
�����ڴ��ӳ����У�ͨ�ö��r��T1�е�Ӌ��ֵҪ�M���ۼӣ�Ȼ���ٳ����ۼӴΔ�����Ӌ����D���Ժ�߀��Ӌ����ƽ��ֵ���@�ӣ�Ӌ������D�پ��Ӝʴ_��ÿ�M��һ��CAP���Д���ճ���늙C���D����Ӌ�����͜p1�����Д��Ƿ��0�����0�t�f��늙C�ѽ��\�����A���������˕r����ȫ���^��ԪPWM1-PWM4��B(t��i)������늙C�i���������ķ�(w��n)��λ�á��ӕrһ�Εr�g���i����PWMݔ���ڡ�
������ ����z�y
����늙C�@�M������Ĝʴ_�ɘ����M����Ч������Ƶ�ǰ�ᡣ����z�y������������������A/D�D�Q�ɂ����E��ֻ�Ѓɲ��ֶ��ܾ��_�IJɘӲ��܌��F����Ĝʴ_�z�y��ȱһ���ɡ�
������ϵ�y(t��ng)���Â��y(t��ng)��PI�㷨��ϵ�y(t��ng)�����p�]�h(hu��n)���ƣ���h(hu��n)���D�٭h(hu��n)���ȭh(hu��n)������h(hu��n)���D�ٿ��Ƶľ��w�^�̣��ɹ��λ�Â������z�y���D��λ����Ϣ�������늙C�Č��H�D�٣����c�o���D���M�б��^��ƫ��ͨ�^PI�ٶȿ��������������ֵ�����c���������������]�h(hu��n)����PI�{��(ji��)������PWM��ռ�ձȣ����Fݔ���D�صĿ��ƣ��Ա��C�õ����ٵ�푑������F늙C�D�ٵĿ��ơ�
3�����Y��
�����������OӋ���{��ϵ�y(t��ng)���ԑ�����ֱ�г̡����г̡�����D��(zh��)�ЙC����������x�ý��г�(0°��90°)������늄ӈ�(zh��)������늙C��һ�_1.1kW��4��8/6�O���~�������7A���_�P����늙C�����ñ������OӋ���{�ٷ���늙C�����Բ�ͬ�Ľo���ٶ��\�У����D��������D4��ʾ��
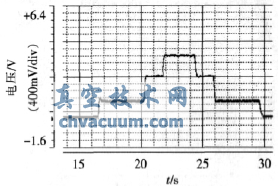
�D4 ϵ�y(t��ng)�{�ٵ��D������
����늙C��16.6s̎�_ʼ���ӣ���0.1s���D�پ�������400r/min;��20.1s̎�D�ٽo��n=1000r/min��0.2s���H�D���_���o����̖Ҫ���1000r/min;��21.8s̎�o���D��n=1500r/min��ԓ�{��ϵ�y(t��ng)��0.2s���_���o����̖Ҫ���1500r/min���ɴ˿����f��ԓϵ�y(t��ng)���ٶȽo��׃���r�����ژO�̵ĕr�g�ȸ��S�o�����D���D��������160r.m-1/div��
������������늄ӈ�(zh��)�������f�������ٶȷ����ȣ����в�ͬ���ٶȿɹ��x���@����Ҫ�{��(ji��)SRM���D�ف팍�F��
������ͬ��늙C�D�٣�늄ӈ�(zh��)�����\����ȫ�г̵ĕr�gҲ�Ͳ�ͬ����늙C�D�ٞ�400r/min�r��늄ӈ�(zh��)�����\����ȫ�г����Õr�g��70s;��늙C�D�ٞ�1000r/min�r��늄ӈ�(zh��)�����\����ȫ�г����Õr�g��28s;��늙C�D�ٞ�1500r/min�r��늄ӈ�(zh��)�����\����ȫ�г����Õr�g��19s���ɴ˿�Ҋ���Ñ�߀���Ը�����ͬ������늙C���D���M���O���팍�F��늄ӈ�(zh��)�����\����ȫ�г̕r�g���{��(ji��)��
������(zh��)�ЙC����ȫ�г̿��Է֞�Σ�����SRM�����{�٣����ÿһ�ξͿ����x��ͬ���D�٣���Ч�ر���“ˮ�NЧ��”��“���g”�F��
�������ñ������OӋ���{�ٷ������õ��IJ�ͬ�D����늙C�����������D5��ʾ��

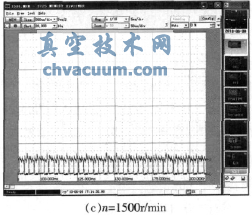
�D5 ��ͬ�D���µ��������
����ԓ�{��ϵ�y(t��ng)���Ã�������\�С���������D�О�A��C���������(2A/div)���䌧ͨ����DA-AB-BC-CD�������D��λ����̖��00-01-11-10�����ڿ��]��늸е�Ӱ푣����㷨�Б���PI�㷨��������εIJ��Ӻ�С����������늄ӈ�(zh��)�����ķ�(w��n)���\�������õ�Ч����
4���Y�Z
�������Č�����SRM������늄ӈ�(zh��)�����{��ϵ�y(t��ng)�Ŀ����������M���˳�����̽ӑ���о�������ˌ�SRM�{��ϵ�y(t��ng)���������ֳ�����OӋ���������F��λ�Ùz�y���ٶ�Ӌ�㡢����ز��Լ�PWM늉�ݔ���ȹ��ܡ����ñ���������PI�{��(ji��)�����㷨������늄ӈ�(zh��)�����M���{�ٿ��ƣ�ͨ�^�������ó��Č������������ԓ�{��ϵ�y(t��ng)����������늄ӈ�(zh��)�����ϣ����D�ٺ�������涼�ܺܺõظ��S�o������Ч�pС������ӣ����������늄ӈ�(zh��)�����Ŀ�������ȡ���˝M���Ч����