����CANopen�f�h��늄ӈ��ЙC���OӋ
����ᘌ���Ҏ��늄ӈ��ЙC���ĬF���Ӿ���ʽ���������������������S�o���y���ɿ��Բ��ߡ��W�jͨ��������ȷ���Ć��},�����һ�N����CANopen�f�h�Ŀ�����늄ӈ��ЙC���OӋ�������ں�Ҫ��B늄ӈ��ЙC���ܘ��Ļ��A��,���Ƚo����늄ӈ��ЙC����������Ӳ���OӋ����,������Ҫ��B��늄ӈ��ЙC�����Ɔ�Ԫ�·��CAN����ͨӍ�ӿ��·���OӋ;�����o����ܛ���OӋ��˼·,���c��B�ˌ����ֵ���OӋ��CANopenͨӍ������OӋ,ᘌ�ͨӍ�����OӋ�е��y�c,�����һ�N������з�ʽ�Ĉ���̎��ģʽ�����,�ڌ��H�����гɹ��ؑ�������������OӋ����,���ýY�������@�N������늄ӈ��ЙC���������ܻ�����Ϣ�������ֻ������c,�܉�M�㹤�I����ϵ�y�ľW�j���lչ����
1������
����늄ӈ��ЙC���ǹ��I�^�̿���ϵ�y����ȱ�ٵIJ��֣����V������ʯ�ͻ�����늏S���I����������S����Ӽ��g�Ϳ��Ƽ��g��Ѹ�ٰlչ��늄ӈ��ЙC��Ҳ�@���˿��ٵİlչ������һЩ���a�S�����@���������^�Ƴ��˳�Ҏ�ġ����F������ͨ�Ņf�h�Ŀ�����늄ӈ��ЙC����������������Ŀǰ���a����Ҫ�dz�Ҏ��늄ӈ��ЙC��������ȡ���y�ĬF���Ӿ���ʽ����ÿ�_늄ӈ��ЙC��������Ҫͨ�^7��14�����ƾ����܌��䅢�����f������ϵ�y�Ŀ���ģ���ϡ��@�N��ʽ���b���S�o���r�ߣ�ϵ�y�ĿɔUչ�Բ�����ܬF�������ˆT�ļ��gˮƽ�������B��������w���˞����ص�Ӱ푣��`�����^�ࡣ���⣬����һЩ��������Ҫ��ĭh��������ȼ�ױ���ݗ�䡢���˂������_�ĵط����@�N���y���Ʒ�ʽ�y�Ԅ��Ρ����Q�������}��Ҫ����ЙC�����ֻ������ܻ����W�j������lչ���b�ڴˣ����������һ�N����CAN open�f�h��늄ӈ��ЙC���OӋ������
2���OӋ��������
����CAN open�f�h��һ�N�ښW�dz����е�CAN�ߌӅf�h��ԓ�f�h��������������������ϵ�y���ú����ؘ����ڹ��I�������������õđ���ǰ��������������OӋ�������ڳ�Ҏ늄ӈ��ЙC���OӋ�м���CAN����ͨӍģ�K��ʹ��ɞ�һ�N�߂係��ͨӍ����������늄ӈ��ЙC�����@�N����늄ӈ��ЙC����ȡ�������Ʒ�ʽ��ֻ��ͨ�^2����̖���������������Ϣ�Ă�ݔ������Ҫ����������߂��˿���ͨӍ���ܣ������ˆTֻ���ڿ����ҾͿɌ����ЙC�������h�̿��ơ�
3��늄ӈ��ЙC��Ӳ���OӋ
����늄ӈ��ЙC��Ӳ���OӋ�ǽ������˽�������ܘ��Ļ��A֮�ϵģ���ˣ���Ӳ���OӋǰ�Ⱥ�Ҫ��Bһ��늄ӈ��ЙC���ļܘ���
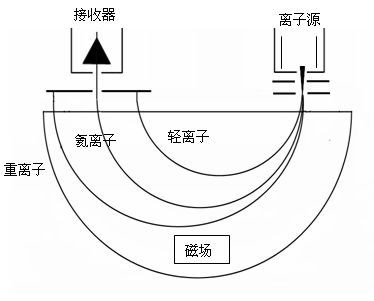
����1)늄ӈ��ЙC���ļܘ�늄ӈ��ЙC���Ǹ����{����(����λ�C)�o���Ŀ�����̖�a��������λ�Ƶ�һ�N�b�ã���Ҫ�ɿ��������ŷ�늙C��λ�Ùz�y�b�ú͜p�����IJ��ֽM�ɣ��䘋����D1��ʾ��
�D1 늄ӈ��ЙC���ļܘ�
�����������ɼ��yλ�o����̖��λ�÷�����̖���yλ�o����̖����λ�{���b�ý�����ϵ�y�l�ͣ��ɬF�������ӿڽ��ա��p��ݔ������̖��λ�Ùz�y�b�ú��γ�λ�÷�����̖�ͽo��������������ݔ�����^һ�����þ��l�������_�PԪ�����^����Ǿ��ԭh��ȥ����늙C���\�D��늙C���Ӝp��������ݔ���S�a��������λ�ơ�
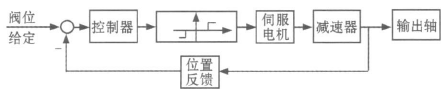
����2)��������Ӳ���OӋ������ϵ�yӲ����늄ӈ��ЙC�����Ɔ�Ԫ��CAN�����ӿچ�Ԫ�M�ɣ���D2��ʾ��
�D2 ��������Ӳ���Y��
��������늄ӈ��ЙC���OӋ����ģ�K���OӋ���x��LPC2292�����@�ɂ���Ԫģ�K������̎������LPC2292��Philip��˾�ă�Ƕ��CAN�������ĸ����܆�Ƭ�C�������l�ʸ��_30MHz���dz��m�����ڿ�������ϵ�y��늄ӈ��ЙC�����Ɔ�Ԫ��λ�Ùz�y�·��늙C���·�����ϙz�y/���·��Һ���@ʾ�·��λ�Ùz�y�·�Ì�����Ͼ������D�λ������λ�Â�������늙C���·�ɹ̑B�^������������i߉�·�M�ɣ����늙C�������D���ӡ�ֹͣ�ȿ��ơ����ϙz�y/��ݔ���·����늸��x�·�ɼ���λ���^��Ȉ���̖��ݔ������Ϣ;Һ���@ʾ����128*128��4���Ҷȵ��c�Һ������Һ�������F�������ˆT�ṩ�����õIJ���ƽ�_��
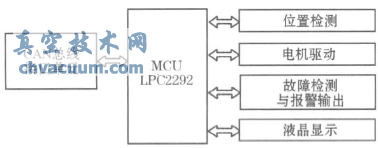
����CANͨӍ�ӿچ�Ԫ�ǿ���������늄ӈ��ЙC��Ӳ���������еģ����ṩ�˿����L���Ľӿڣ����·����D3��ʾ��
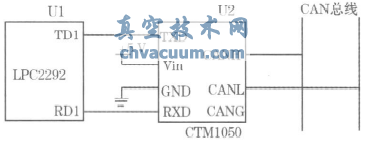
�D3 CANͨӍ�ӿ��·
�����·���հl��ģ�K�x�Î����x���ܵ�CTM1050оƬ��ͨ�^�����Ժܺõ،��FCAN�����ϸ����c늚⡢�Դ֮�g����ȫ���x�ͪ������O��������CAN���c�ķ����ԺͿ��ɔ_�ԡ�
4��늄ӈ��ЙC����ܛ���OӋ
����늄ӈ��ЙC��ܛ���OӋ��Ҫ�����ɷ��棺���ЙC���Ŀ��Ƴ���ͻ���CANopen�f�h��CAN����ͨӍ�������У����Ƴ�����Ҫ���F�y�T��λ�ÿ��ƹ��ܣ�������ʼ���������ɼ���̎�����@ʾ�Ȏײ��֣����ڳ�Ҏ��늄ӈ��ЙC���ж��ь��F������٘�������������c��B����CANopen�f�h��CAN����ͨӍ�����OӋ������CANopen�f�h����[4-5]�����@���ֳ����OӋ�֞錦���ֵ���OӋ��CANopenͨӍ�����OӋ�ɲ��֣����������y�c��
����1)CANopen�f�hͨ�řC��
����CAN�f�hֻ���x������Ӻ͔����·�Ӄɂ��Ӆf�h����CANopen�f�h������A��Ҏ���ˑ��ÌӅf�h����ͨ��ģ�ͣ���D4��ʾ��
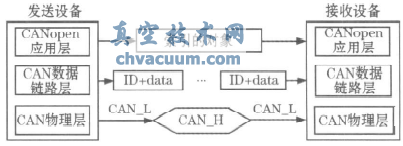
�D4 CANopenͨӍģ��
������CAN open�đ��Ìӣ��O���gͨ�^����Qͨ�Ō����M��ͨ�š����]�����I�Ԅӻ�ϵ�y�Д��������IJ�ͬ��Ҫ��CAN open���x��4˜�ͨ�Ō��քe���^�̔�������(PDO)�����Ք�������(SDO)�����팦��(NMT)������܌���;���У�PDO������Ҫ���ڂ�ݔ���r������SDO�������ڂ���������Ϣ��NMT�������ڌ��F��CANopen�W�j�Ĺ�����������܌����ṩһЩ������ա����@Щͨ�Ō�����L������ͨ�^�����ֵ�팍�F��
����2)�����ֵ���OӋ
���������ֵ�(Object Dictionary)��CAN open�f�h�ĺ��ģ�����һ������Č��ϣ�������CAN open�W�j���O���������Ϣ��ÿ���O��Č����ֵ���нY����ͬ�����ݲ�ͬ�����c��
����CAN open�O���L�������ֵ�r����ͨ�^һ��16λ������һ��8λ�������ķ�ʽ�팤ַ�����ڌ����ֵ�����lĿ���࣬������һһ���e��������ʹ�����l����PDO���������������Č��Ժ͔������b�ɷ������BPDO����Ľ���������늄ӈ��ЙC���Ŀ��������x��PDO���Č��ԣ�Ҋ��1��
��1 PDO������
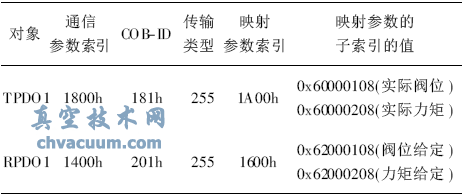
����������CAN open�W�j������Ĺ��c��늄ӈ��ЙC�����f��TPDO����l�ͽo�����c�Č��r��������RPDO�t�ǽ��Ձ����������c�l�͵Ĕ�����������Ϣ���ɱ�1��֪��ÿ��TPDO��RPDO������2�������ֵ�lĿ��ͨ�Ņ�����ӳ�䅢����������TPDO1�����f��ͨ�Ņ�����ӳ�䅢����������������֮�g���Pϵ���Լ�PDO����Ĕ������b�^�̣�Ԕ�����̣���D5��ʾ��
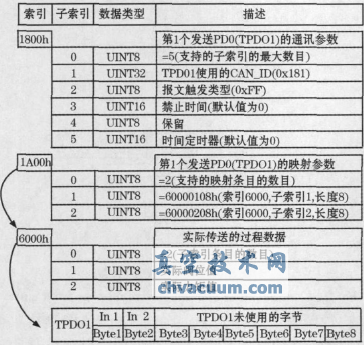
�D5 ӳ����bPDO
�����ɈD5֪��ͨ�Ņ�������1800h����5�����������քeҎ����ԓPDOʹ�õ�COB_ID����ݔ��͡���ֹ�r�g�����r�����ڵȅ���;��ӳ�䅢������1A00h����2����������������ʾӳ�䵽ԓPDO�е�2����������������1�еĴ�ŵ���60000108h����ʾ������6000h��������01h���L�Ȟ�8λ�Ĕ���ӳ�䵽TPDO1�ĵ�1���ֹ�����60000108h���ŵ����Ñ�Ҏ���Č��H�yλֵ�����M��ͨӍ������Ҏ���Ă�ݔ��͕r�����H�yλֵ����ͨ�^TPDO1�l�ͽoCANopen�W�j�����c���Ķ����F���Ĺ��c֮�g����Ϣ������
����3)CANopenͨӍ�����OӋ
����늄ӈ��ЙC����CANopenͨӍ�������̣���D6��ʾ��
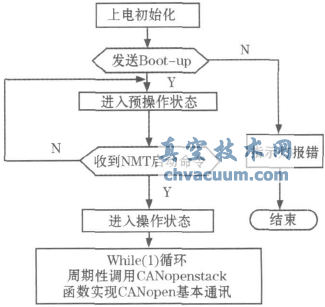
�D6 CANopenͨӍ���̈D
�������ȣ����ЙC����늳�ʼ��������ʼ����ɺ����l��Boo-tup���ģ�ͬ�r��ͨ�Š�B�ɳ�ʼ����B�ГQ���A������B��ԓ��B�H���M��SDOͨ��;���յ�NMT�����c�Ć��ӈ��ĺ��cͨ�Š�B���A�����ГQ��������B������ϵ�y������������B����ԓ��B���ЙC�����ó���ѭ�h�{��CAN open stack�������FCAN open����ͨӍ��
����CAN open����ͨӍ��Ҫ�������������棺���FCANopen��B�D�Q�C�ơ��{��CAN�����հl����̎��NMT��PDO��SDO�Ȉ��ģ���������̎���Y��ˢ���Hݔ���ݔ�������У��ڶ����������y�c�����CAN openҎ����ͨӍ���ķN��^�࣬��ο�����Ч�،��@Щ�����M�з�����{����������̎���DZ��Cϵ�y���r�Ե��P�I����ˣ��ڳ����OӋ�r��ȡ��һ�N������еķ։K��ȡ����̎��ģʽ�������˼�룬��D7��ʾ��
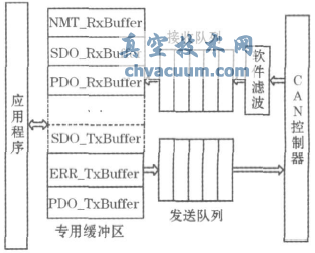
�D7 ������еĈ���̎��ģʽ