����C8051F340��������늄ӈ��ЙC������ϵ�y�OӋ
�������Q���y늄ӈ��ЙC���ڹ��I���a�F���IJ��㣬�������C8051F340��������늄ӈ��ЙC������ϵ�y���OӋ�����������Ϳ���ϵ�yͨ�^�����Ѻõ��˙C�������棬�߂�������\���c���ܣ�ʹ�{ԇ�����c�����Ų�����η��㡣��Ӳ���ϣ�ͨ�^���ù����ӿ�����̖���i�·�����FӲ�����i���ܣ������|�l��̖ͬ�r��Ч���¿��ƻ�·�Ɂy�������������늄ӈ��ЙC���Ŀɿ��ԡ��г�λ�ÿ���ʡȥ�ˏ��s�ęCе�г̣����ßo���|ʽ�����D�^�����a���������˙Cе�Y����������г̷ֱ��ʾ��ȣ��ֱ��ʿ��_��0.08790��ͨ�^��Ӳ���·��ܛ������ă������ƣ�C8051F340��Ƭ�C�ĺ������ã����F���y�T늄ӈ��ЙC������ϵ�y�����ܻ����������߿ɿ��Ե�Ҫ��
1������ϵ�y�OӋԭ��
����������늄ӈ��ЙC������ϵ�y����C8051F340���������Ɔ�Ԫ��C8051F340����ȫ���ɵĻ����̖Ƭ��ϵ�y�͆�Ƭ�C������SiliconLabs����CIP-51�������Ⱥˣ����И˜�8052���������O����������4��16λӋ����/���r����2�����ДUչ���������õ�ȫ�p��UART��1��������SPI�˿ڡ�1��SMBUS�˿ڡ�40��I/O���_������5����/���^ģ�K�Ϳ��T�����r�����ܵĿɾ���Ӌ����/���r�����(PCA)��4352�ֹ��ăȲ�RAM��128�ֹ�����ܼĴ����ȡ�C8051F340Ƭ���S����Ӳ���YԴ��ʹ���m����������늄ӈ��ЙC������ϵ�y��
����������늄ӈ��ЙC������ϵ�y���÷�����ʽ�Y���OӋ�����g���M���Y�����Σ��ɿ��Ըߡ�������ʽ��ŸБ��������ھ͵ؠ�B�£�����ͨ�^������尴�o���ֳ�ʽ�t���b��������늄ӈ��ЙC�����_���P��ͣ�����������O�á��g�[�Ȳ��������h�̠�B�£���ͨ�^�_�P����̖��4~20mA�����̖���F늄ӈ��ЙC�����_���P��ͣ�Ȳ�����ϵ�y���Џ���Ĺ������\��ܺ��ψ��ܣ�����ӛ��O���\�Р�B�������Ϳ���ϵ�y���Դģ�K��������ģ�K���˙C����ģ�K���г̙z�yģ�K���_�P����̖ݔ��ݔ��ģ�K��ģ�M����̖ݔ��ݔ��ģ�K�M�ɣ�����C8051F340����������оƬ��ͨ�^����Ӳ��ģ�K��ݔ��ݔ�����������F���y�T늄ӈ��ЙC���ĸ�헿��ƹ��ܣ���ϵ�y�OӋԭ����D��D1��ʾ��
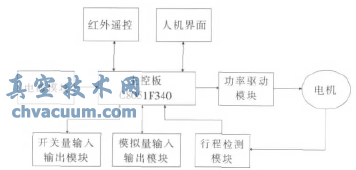
�D1 ����ϵ�yԭ����D
2������ϵ�y��Ӳ���OӋ
����������늄ӈ��ЙC������ϵ�yӲ���·���Դ�塢���ذ塢������������ֽM�ɡ����ذ��c�������ͨ�^UART�ڴ���ͨ�ţ����F�˙C��Ԓ�����ذ�����ⲿָ����ƹ�����ģ�K������늙C�����D�\�У����F�y�T���_�����P�]�������rݔ���_�P��������̖��ģ�M��������̖��
2.1���Դģ�K
�����Դ������ذ��ṩ��·ֱ��늉���̖��һ·��+24V(1±1%)��һ·��+5V(1±1%)��+24V늉���̖����6·�_�P����ģ�M��ݔ��ݔ����̖��������ģ�K�·�Դ��ݔ���·��D2��ʾ��+5V늉���̖�������ذ�C8051F340��Ƭ�C���������PӲ���·�Դ��ݔ���·��D3��ʾ��
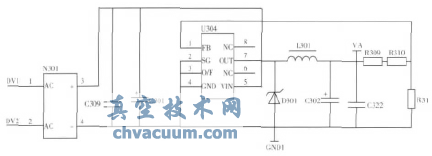
�D2 +24V�Դݔ���·
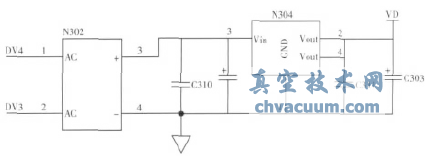
�D3 +5V�Դݔ���·
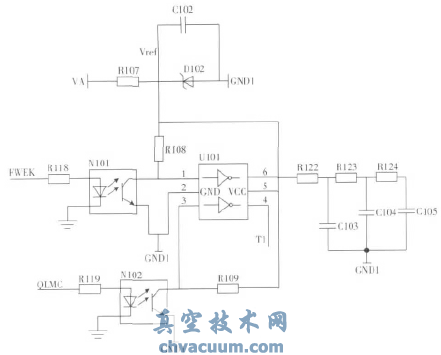
2.2��������Ӳ���·
������������̖�����·��D4��ʾ����������̖�����·���FӲ�����i���ܣ������|�l��̖ͬ�r��Ч���¿��ƻ�·�Ɂy������C8051F340��Ƭ�C3·IO�����鹦�����·�|�l��̖��һ·IO�������|�l��̖ݔ�����Դ������̖�����·�����|�l������̖���Mһ��������|�l��̖�ɿ��ԡ�IO�����Þ����췽ʽ�����ƽ��Ч��늄ӈ��ЙC���ڹ��I�F��ʹ���^���У����ڬF���\���������O�䣬�������N�x������������׃�l������������̖�ɔ_�Լ����NΣ�U�ď�늉���̖�����˱��C늄ӈ��ЙC������ϵ�y�İ�ȫ���c�ɿ��ԣ����ù���TLP521-4���|�l��̖�M����̖���x�������|�l��̖�ɔ_�����C늄ӈ��ЙC���ɿ��������\�С�
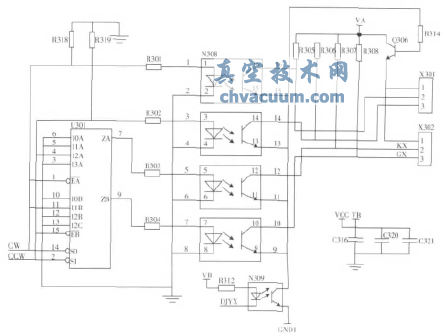
�D4 ��������̖�����·
2.3���г̙z�yӲ���·
�����г̙z�y�·���ßo���|ʽ�����D���a�������Ԝʴ_�y������360°�����ȵĽǶȣ���ֱ��ʿ����_��0.0879°�����a��ͨ�^ݔ���X݆���c�y�T늄ӈ��ЙC�����г̂��Ӳ������ϣ�ʹ֮���и߾���λ�Ùz�y���ܡ����a�����ЃȲ��������������ذ�+3.3V�Դ늉��¹��������ذ�ͨ�^���ڲ������Դ��б���������ʽ�x���г̔��������F�yλ�������xȡ��
2.4��ģ�M����̖Ӳ���·
����������늄ӈ��ЙC������ϵ�y4~20mAģ�M��ݔ������C8051F340��Ƭ�C��PWMݔ�����ܡ�C8051F340����5����/���^ģ�K�Ϳ��T�����r�����ܵĿɾ���Ӌ����/���r�����(PCA)���������Ϳ���ϵ�y�PCA���Þ�16λ�}���{������ʽ����ԓ��ʽ�£�16λ��/���^ģ�K���xPWM��̖���ƽ�r�g��PCA�r犔�������PCA���P�Ĵ���������ݔ��ռ�ձȿ�׃��PWM����PWMݔ���·���ù���N101�M����̖���x���ڲ�Ӱ푹���N101�_�P���ʵėl���£�PWM���l���O�Þ�200Hz�������Ϳ���ϵ�y�ɼ��г̙z�y��̖��Ӌ�㮔ǰ�yλֵ��Ȼ��ݔ����ͬ�l�ʵ�PWM�����ڹ���ݔ���ˣ�ͨ�^RC�e���·��PWM���D�Q��늉���̖��ͨ�^����ԴӲ���·��ݔ��4~20mA�����̖�����F�yλģ�M����̖�������ܡ�ģ�M��������̖ݔ���·��D5��ʾ��
�D5 ģ�M��������̖ݔ���·
2.5���_�P����̖ݔ��Ӳ���·
����������늄ӈ��ЙC������ϵ�y���h�̠�B�r��ͨ�^�_�P����̖ݔ��Ӳ���·�������_���P��ָͣ����̖������늄ӈ��ЙC��������P������������ⲿ��̖�ɔ_��ͨ�^����N109��N110��N111�M����̖���x�����x����_�P����̖����C8051F340��Ƭ�CIO�ڣ�IO�����Þ����������_©��ʽ����ܛ�����Ʒ�ʽ�в���“ȥ��”̎����ʽ���ܜʴ_�����r�ɼ��_�P��ݔ����̖����Ч�����`���������늄ӈ��ЙC���\�еĿɿ��ԡ����ö��O��VD111����Ч����Ӿ��e�`������Ӱ푡��_�P����̖ݔ���·��D6��ʾ��
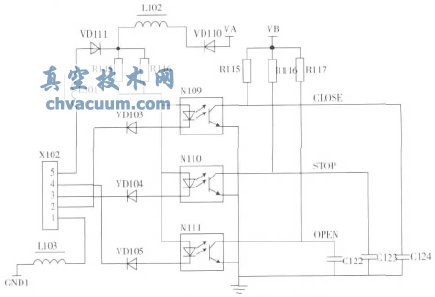
�D6 �_�P����̖ݔ���·
3������ϵ�y��ܛ���OӋ
����������늄ӈ��ЙC������ϵ�y���������̿�D��D7��ʾ��
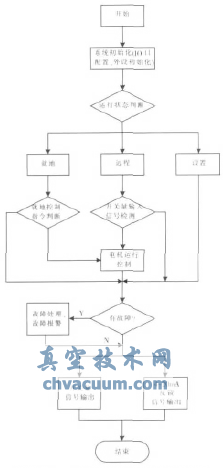
�D7 ���������̿�D
4���\����
����ͨ�^�����OӋ��������늄ӈ��ЙC������ϵ�y�\�пɿ��Դ��������ͨ�^��EMC늴ż����������Ҫ��





