ļŖäėł╠(zh©¬)ąąÖCśŗĮŪČ╚£y┴┐ĘĮĘ©Ą─Ė─▀M
ĪĪĪĪ░┤ššJB/T8219-1999ę¬Ū¾▀MąąĮŪąą│╠ļŖäėł╠(zh©¬)ąąÖCśŗĄ─£yįćųąŻ¼ČÓéĆųĖś╦┼cīŹ£y▌ö│÷▌Sąą│╠ėąĻPĪŻė├╚½łAāxüĒ£y┴┐ėąę╗Č©Ą─ŠųŽ▐ąįŻ¼ę╗ą®ŪķørŽ┬╩Ū▓╗─▄ØMūŃ£yįćę¬Ū¾Ą─ĪŻ▀\ė├ŠÄ┤aŲ„į┌Š½├▄Č©╬╗Īó╦┘Č╚ĪóķLČ╚Īó╝ė╦┘Č╚Īóš±äėĄ╚ĘĮ├µĄ├ĄĮÅVĘ║Ą─æ¬ė├Ż¼ŪęŠ▀ėąĮYśŗ║åå╬Īóėŗ┴┐Š½Č╚Ė▀Īóē█├³ķLĄ╚ā×(y©Łu)³cŻ¼═Ļ╚½┐╔ęįįOėŗ│÷ØMūŃ£yįćę¬Ū¾Ą─ĘĮ░ĖĪŻ
1ĪóĖ─▀MĄ─ę└ō■(j©┤)╝░Ė─▀MĘĮĘ©
ĪĪĪĪ░┤JB/T8219-1999ĪČ╣żśI(y©©)▀^│╠£y┴┐║═┐žųŲŽĄĮy(t©»ng)ė├ļŖäėł╠(zh©¬)ąąÖCśŗĪĘś╦£╩ųąĄ─5.2.4Śl┐Ņųąī”įć“×ė├āxŲ„Ą─Š½Č╚ę¬Ū¾╩Ū“Ųõ╗∙▒Šš`▓Ņæ¬ąĪė┌╗“Ą╚ė┌▒╗£y┴┐«a(ch©Żn)ŲĘ╗∙▒Šš`▓ŅŽ▐Ą─1/3Ż¼Ųõ┴┐│╠ĘČć·┼c▒╗£yųĄĄ─ĘČć·ŽÓ▀mæ¬ĪŻ”
ĪĪĪĪ▒Šś╦£╩Ą─5.4.1▒╚└²╩Įł╠(zh©¬)ąąÖCśŗĄ─╗∙▒Šš`▓Ņėŗ╦Ń╣½╩ĮŻ║
ĪĪĪĪδŻ║╗∙▒Šš`▓ŅŻ╗L1Ż║▌ö│÷▌Sąą│╠īŹ£yųĄ(°)Ż╗L0Ż║▌ö│÷▌Sąą│╠╝sČ©šµųĄ(°)Ż╗LŻ║▌ö│÷▌SŅ~Č©ąą│╠(°)ĪŻ
ĪĪĪĪ▒Šś╦£╩Ą─4.2.1╗∙▒Šš`▓Ņę¬Ū¾1╝ēĄ─š`▓Ņ╩Ū±1%ĪŻ
ĪĪĪĪł╠(zh©¬)ąąŲ„Ņ~Č©ĮŪąą│╠ųĄėą50°Īó70°Īó90°120°Īó270°▀@5ĘNĪŻŽ┬├µėŗ╦Ń▀@5ĘNŅ~Č©ĮŪąą│╠Ą─į╩įSūŅ┤¾ųĄš`▓ŅĪŻ
ĪĪĪĪįOŻ║L0Ż║=0°Ż╗L=Ęųäe┤·╚ļ50°Īó70°Īó90°120°Īó270°;δ=1%┤·╚ļ(1)╩ĮŻ¼ĮŌĘĮ│╠Ū¾│÷L1Ą─į╩įSūŅ┤¾ųĄĮŌĄ├Ż║L1=0.5°Īó0.7°Īó0.9°Īó1.2°Īó2.7°
ĪĪĪĪ░┤£y┴┐āxŲ„Ą─Š½Č╚æ¬×ķ▒╗£y┴┐«a(ch©Żn)ŲĘ╗∙▒Šš`▓ŅŽ▐Ą─1/3Ż¼Ą├ĄĮ£y┴┐āxŲ„Ą─Š½Č╚×ķ0.17°Īó0.23°Īó0.30°Īó0.40°Īó0.90°ĪŻ
ĪĪĪĪ┴Ē═Ō╚½łAāx░▓čbį┌ł╠(zh©¬)ąąÖCśŗĄ─▌ö│÷▌S╔ŽĢ■ėą░▓čbŲ½ą─¼F(xi©żn)Ž¾ĪŻ░▓čbŲ½ą─Š═╩ŪųĖ╚½łAāxĄ─łAą─┼c▌ö│÷▌SĄ─▌Są─▓╗ųž║ŽŻ¼╚ńłDę╗╦∙╩ŠĪŻįO╚½łAāx░ļÅĮ×ķRŻ¼O×ķ╚½łAāxĄ─łAą─Ż¼O'×ķ▌ö│÷▌SĄ─▌Są─Ż¼O┼cO'ų«ķgĄ─ŠÓļx×ķdŻ¼╝┘įOŲ╩╝³c(┴Ń╬╗)į┌X▌S╔ŽŻ¼«ö▌ö│÷▌S▐D(zhu©Żn)äėĮŪČ╚×ķα’ĢrŻ¼╚½łAāxŽÓī”▌ö│÷▌S▐D(zhu©Żn)äėĄ─ĮŪČ╚×ķαĪŻė╔łDĄ├│÷Äū║╬ĻPŽĄ╩ĮŻ║
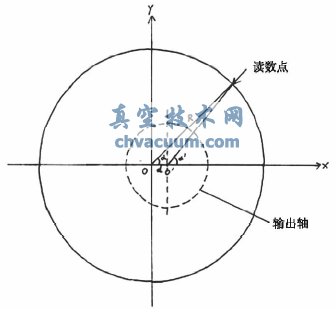
łD1 ░▓čbŲ½ą─╩ŠęŌłD
ĪĪĪĪĪ„α=α'-α╝┤×ķ▌ö│÷▌S║═╚½łAāx▐D(zhu©Żn)ĮŪĄ─š`▓ŅųĄŻ¼░č╩Į(1)┤·╚ļtgĪ„α=tg(α'-α)▓óš¹└ĒĄ├ĄĮŻ║
ĪĪĪĪī”╩Į(2)Ą─ā╔▀ģŪ¾ī¦Ą├Ż║
ĪĪĪĪ«ö╩Į(3)Ą╚ė┌0ĢrŻ¼╩Į(2)╚ĪūŅ┤¾ųĄ╝┤Ż║Rdcosα-d2=0Ą├│÷
ĪĪĪĪ░č╩Į(4)┤·╚ļ╩Į(2)Ą├Ż║
ĪĪĪĪ╦∙ęįĪ„αmax=d/RĪŻ╦∙ė├╚½łAāx░ļÅĮRęčų¬×ķ100mmŻ¼«öd=1mmĢrŻ¼Ī„αmax≈0.6°Ż¼▀@śėš`▓ŅŠ═▒╚▌^┤¾┴╦ĪŻį┘╝ė╔ŽūxöĄ(sh©┤)Ģr╚╦Ą─ęĢ▓ŅŻ¼ė├╚½łAāxüĒ£y┴┐Š═▒╚▌^┤ų▓┌┴╦ĪŻ
2ĪóŠÄ┤aŲ„Ą─ĘNŅÉ╝░▀xō±
ĪĪĪĪĖ∙ō■(j©┤)Öz£yįŁ└ĒŻ¼ŠÄ┤aŲ„┐╔Ęų×ķ╣ŌīW╩ĮĪó┤┼╩ĮĪóĖąæ¬╩Į║═ļŖ╚▌╩ĮĪŻĖ∙ō■(j©┤)Ųõ┐╠Č╚ĘĮĘ©╝░ą┼╠¢▌ö│÷ą╬╩ĮŻ¼Ęų×ķį÷┴┐╩ĮŠÄ┤aŲ„║═Į^ī”╩ĮŠÄ┤aŲ„ĪŻ
ĪĪĪĪį┌ļŖäėł╠(zh©¬)ąąÖCśŗĄ─£yįćįć“×ųąŻ¼ę¬Ū¾ļŖäėł╠(zh©¬)ąąÖCśŗĮø(j©®ng)╩▄Łh(hu©ón)Š│£žČ╚-25ĪµĪ½70Īµ;ÖCąĄš±äėŅl┬╩10Ī½150HzŻ¼╬╗ęŲĘ∙ųĄ0.15mmŻ¼╝ė╦┘Č╚Ę∙ųĄ20m/s2Ą╚ć└┐ߌl╝■Ż¼ī”ė┌ŠÄ┤aŲ„Ą─▀xė├Ż¼▒žĒÜ═¼śė─▄ē“Įø(j©®ng)╩▄ūĪ═¼śėĄ─Śl╝■Ż¼▓óŪę£y┴┐Š½Č╚▓╗╩▄Ųõė░ĒæĪŻ
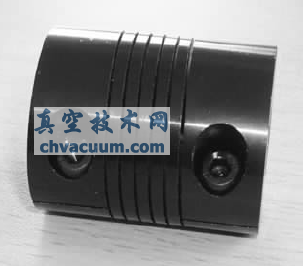
ĪĪĪĪČÓĘNŠÄ┤aŲ„Č╝┐╔ØMūŃ╔Ž╩÷ę¬Ū¾Ż¼ŠC║Ž┐╝æ]│╔▒Šę“╦žŻ¼▀xė├┴╦┤┼ŠÄ┤aŲ„ĪŻ┤┼ŠÄ┤aŲ„║═Ųõ╦¹ŅÉą═ŠÄ┤aŲ„ŽÓ▒╚Ż¼Š▀ėąĖ▀Ņl╠žąį║├Ż¼Ēææ¬╦┘Č╚┐ņ;¤oĮėė|╬╗ų├é„Ėą┐╔ęį═Ļ├└æ¬ė├ė┌ÜŌ£žūā╗»┤¾Ą╚É║┴ėŁh(hu©ón)Š│Ž┬;║─ļŖ╔┘Īó╩╣ė├ē█├³ķL;ĮYśŗ║åå╬Īó┐╣ø_ō¶┴”ÅŖŻ¼┐╔┐┐ąįĖ▀ĪŻ

łD2 │Żė├┤┼ŠÄ┤aŲ„
łD3 ┬ō(li©ón)▌SŲ„
ĪĪĪĪ▓╔ė├─┐Ū░▌^×ķ│Żė├Ą─AS5040ąŠŲ¼┤┼ŠÄ┤aŲ„üĒįOėŗ╦∙ąĶ£yį接Įy(t©»ng)ĪŻ╩ūŽ╚Ż¼═©▀^┬ō(li©ón)▌SŲ„░č▌ö│÷▌S║═┤┼ŠÄ┤aŲ„┬ō(li©ón)ĮėŻ¼┤┼ŠÄ┤aŲ„╦∙▌ö│÷Ą─├}ø_═©▀^▓╔╝»┐©▓╔╝»Ż¼į┘═©▀^╚ńLabview╠ōöMāxŲ„│╠ą“Ą─╠Ä└Ē▓ó░č£y┴┐ĮY╣¹’@╩Š│÷üĒĪŻ
3ĪóĮYšZ
ĪĪĪĪ═©▀^╔Ž╩÷Ė─▀MŻ¼į┌ļŖäėł╠(zh©¬)ąąÖCśŗĄ─£yįćųąė÷ĄĮĄ─å¢Ņ}Š═Ą├ęįĮŌøQŻ¼ė╚Ųõ╩Ūį┌š±äėĀŅæB(t©żi)Ž┬Ą─£y┴┐ėą┴╦┐╔┐┐Ą─▒ŻūCŻ¼ØMūŃ┴╦ś╦£╩Ą─ę¬Ū¾ĪŻ





