������ֱ�г�늄ӈ�(zh��)�ЙC��(g��u)ԭ������(y��ng)��
������B������YLMϵ��ֱ�г�늄ӈ�(zh��)�ЙC��(g��u)�Ĺ���ԭ���ͽY(ji��)��(g��u)���������^늄ӈ�(zh��)�ЙC��(g��u)�c��ӈ�(zh��)�ЙC��(g��u)��Һ�ӈ�(zh��)�ЙC��(g��u)�ă�(y��u)ȱ�c���U��YLMϵ��ֱ�г�늄ӈ�(zh��)�ЙC��(g��u)�F(xi��n)����(y��ng)�õă�(y��u)�ݣ�����f��늄ӈ�(zh��)�ЙC��(g��u)�İl(f��)չڅ�ݡ�
����늄ӈ�(zh��)�ЙC��(g��u)�ɷ֞�ֱ�г̺ͽ��г�2���ֱ�г�늄ӈ�(zh��)�ЙC��(g��u)�����{(di��o)��(ji��)����ݔ����̖���������D(zhu��n)�Q���cݔ����̖�ɱ�����ֱ��λ��ȥ�����y�T��������{(di��o)��(ji��)�C��(g��u)���Ԍ��F(xi��n)�Ԅӿ��ơ��S����Ӽ��g(sh��)���Cе���g(sh��)�Ϳ��Ƽ��g(sh��)�İl(f��)չ��������늄ӈ�(zh��)�ЙC��(g��u)�ɞ�һ�N�l(f��)չڅ�ݡ�������늄ӈ�(zh��)�ЙC��(g��u)��̎�����������������������й��ʿ��Ɔ�Ԫ�������\����Ԫ���˙C��Ԓ��Ԫ�����M���]�h(hu��n)����;���Д�(sh��)��ͨ�Žӿ�;�{(di��o)ԇ�r���з��������ԣ����ڲ����_늚����w��ǰ���¿��O(sh��)�����N�\�п��ƅ���(sh��)��
1������ԭ���c�Y(ji��)��(g��u)
����(1)����ԭ��
����YLMϵ��ֱ�г�늄ӈ�(zh��)�ЙC��(g��u)���Ԇ��ཻ���ŷ�늄әC������b�õ�λ���ŷ��C��(g��u)����ϵ�y(t��ng)Ҋ�D1��ԓ늄ӈ�(zh��)�ЙC��(g��u)�Ĺ���ԭ��飺���܁����{(di��o)��(ji��)ϵ�y(t��ng)ݔ��4��20mADC������̖Ii�c늄ӈ�(zh��)�ЙC��(g��u)��λ�÷�����̖If��������^�Ŵ�Ii�cIf֮��^���^(q��)Σ��늄әC��ͨ�Դ���Ժ������D(zhu��n)��(j��ng)�p����׃?y��u)�ݔ���S���S��ֱ��λ�ơ���λ�Ƶ�ͬ�r��λ�ðl(f��)����ݔ��1���cλ�Ƴɱ�����λ�÷�����̖If����Ii�cIf֮��С�����^(q��)Σ�r���Д�늄әC�Դʹֹ֮ͣ�D(zhu��n)�ӣ��Ķ�ݔ���S��(w��n)����һ��λ���ϣ�ϵ�y(t��ng)̎��ƽ���B(t��i)����늄ӈ�(zh��)�ЙC��(g��u)��ݔ����̖���tݔ����̖�c������̖��ƫ������O�ԣ�늙C���D(zhu��n);��֮�tƫ���ؓ�O�ԣ�늙C���D(zhu��n)�����^(q��)Eֵ�����O(sh��)�Õr��׃��
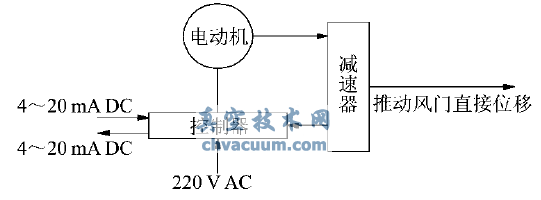
�D1 ��(zh��)�ЙC��(g��u)ϵ�y(t��ng)��D
����(2)������
����늄ӈ�(zh��)�ЙC��(g��u)�Ŀ���������Ŀǰ���е�PICϵ�І�Ƭ�C������Ԫ����ͬ�r���ßo�|�cݔ�����������Љ����L�������ɿ����w�eС�������p�ȃ�(y��u)�c����ݔ�������̖4��20mADC�r��(j��ng)��늸��x��A/D�D(zhu��n)�Q��ģ�M��̖�D(zhu��n)�Q�锵(sh��)����̖��������CPU�M��̎����CPU�ٸ���(j��)��(zh��)��
�����C��(g��u)ݔ���S�Į�ǰλ��(��������)�M�б��^��Q��늙C�Ć�/ͣ���D(zhu��n)�ӷ���ͨ�^�ӿ��·���(q��)��늙C���D(zhu��n)�ӣ�ͬ�r��CPU����؏Ă������ϲɼ���(zh��)�ЙC��(g��u)ݔ���S�Į�ǰλ�ò��c�o�����M�б��^�����F(xi��n)ݔ����̖����(zh��)�ЙC��(g��u)��ݔ���Sλ�ƵĿ��ơ�
����(3)�p�ٙC��(g��u)
�����p������늙C�����C֮�g�������]ʽ�����b�ã��Á������D(zhu��n)�ٺ������D(zhu��n)�أ��ԝM�㹤����Ҫ��늄ӈ�(zh��)�ЙC��(g��u)�Ĝp�����C��(g��u)�ɶ���ƽ�X݆�������C��(g��u)���ֲٙC��(g��u)�M�ɣ��ԄӲ����r�������ŷ�늙Cͨ�^�X݆�M����������ĸ�Ķ���ݔ�S�ڌ�(d��o)���Ё����Ƅ�;�քӲ����r�����D(zhu��n)��݆�Ķ������X݆�M��������ĸʹ��ݔ�Sλ�ƣ�ݔ���S�ĘO�ߴ��Ɍ�(d��o)���L�țQ����
2���F(xi��n)����(y��ng)��(y��u)��
����(1)3�N��(zh��)�ЙC��(g��u)��(y��u)ȱ�c���^
������(zh��)�ЙC��(g��u)�ɷ֞�늄ӈ�(zh��)�ЙC��(g��u)����ӈ�(zh��)�ЙC��(g��u)��Һ�ӈ�(zh��)�ЙC��(g��u)���䃞(y��u)ȱ�c���^Ҋ��1��
��13�N��(zh��)�ЙC��(g��u)��(y��u)ȱ�c���^
|
|
늄ӈ�(zh��)�ЙC��(g��u) |
��ӈ�(zh��)�ЙC��(g��u) |
Һ�ӈ�(zh��)�ЙC��(g��u) |
|
��(y��u)�c |
1.��(zh��)�Є����� |
1.�Y(ji��)��(g��u)����
|
1.������ |
|
ȱ�c |
1.�Cе���Ӳ����^�࣬������Cе�����ļӹ����ȿ��Ʋ�����λ�ÿ��ƾ��Ⱦ��_����Ҫ�� |
1.���ƾ��Ⱥ;S�oǷ��
|
1.�w�e�� |
������ˣ�늄ӈ�(zh��)�ЙC��(g��u)������ͻ���ă�(y��u)�c�����V����(y��ng)���������ұ��ʯ�͡��������p���ȹ��I(y��)���T���Ԅӿ����I(l��ng)��
����(2)YLMϵ��ֱ�г�늄ӈ�(zh��)�ЙC��(g��u)�ă�(y��u)�c
����YLMϵ��ֱ�г�늄ӈ�(zh��)�ЙC��(g��u)�e�m�ϓ���Ŀɿ���λ���m����ȼ�������y�T���~Ƭ��׃���(q��)�ӻ�����ֱ�г̑�(y��ng)�È��ϡ�Ŀǰ��YLMϵ��ֱ�г�늄ӈ�(zh��)�ЙC��(g��u)�ѳɹ���(y��ng)���ڶ��늏S偠t��2���L(f��ng)�T�ϣ���������\�Ќ��`��������(zh��)�ЙC��(g��u)��λ�ʴ_�����ܷ�(w��n)����Ч�����á�
����YLMϵ��ֱ�г�늄ӈ�(zh��)�ЙC��(g��u)���Խ��ܟoԴ�|�c(��DCSϵ�y(t��ng)��DO)���ơ�4��20mAģ�M�����ƺ�220VAC��Դ�_�P(gu��n)�����Ƶ�3�N����;�ڹ��Ϡ�B(t��i)�¿��Ա�����ȫ�_��ȫ�P(gu��n)��ԭλ�á�
������(y��u)�c��
����1)���칤ˇ��(f��)�s���ӹ������������w�eС�������p���ߜغͰ��b����ă�(y��u)�c;
����2)�Y(ji��)��(g��u)�ϲ��þ����p�����i���ܡ��p�ط�ˮ���p���������o���ԝ����IJ�������ʹ̎�ڐ��ӭh(hu��n)������(zh��)�ЙC��(g��u)�Կ�����������;
����3)�·�����O(sh��)Ӌ�����ӽ��ȶ�Ŀ��ֵ����������߈�(zh��)�ЙC��(g��u)�������ȷ����^�_��ʎ��������ȫ���x�·����߿��ɔ_����;
����4)���÷����C���g(sh��)�������h(hu��n)���ضȷ�����-25�桫80�棬��(zh��)�ЙC��(g��u)���L�ڵط�(w��n)��������
�������⣬��(zh��)�ЙC��(g��u)߀�ߔ���̖���{(di��o)��(ji��)�C��(g��u)�����ȹ��ϱ��o����B(t��i)���@ʾ�����cݔ�����ܡ�
3��չ��
�����S�����N�¼��g(sh��)�Ŀ����M����늄ӈ�(zh��)�ЙC��(g��u)����С�ͻ���һ�w������(sh��)�ֻ������ܻ����������;W(w��ng)�j(lu��)��������~�M�����ƾ��Ȍ�Խ��Խ�ߣ�ʹ�íh(hu��n)��Խ��Խ�V��Ȼ�������a(ch��n)늄ӈ�(zh��)�ЙC��(g��u)�ڮa(ch��n)Ʒ��Ʒ�N�����ƾ��ȡ���ˇˮƽ���ɿ��ԡ����ܻ��;W(w��ng)�j(lu��)������߀���^���࣬��������֪�R�a(ch��n)��(qu��n)�ĸ�����늄ӈ�(zh��)�ЙC��(g��u)߀���٣�ؽ��Ŭ���ҳ���࣬�M��s�̇��a(ch��n)늄ӈ�(zh��)�ЙC��(g��u)�c�������Mˮƽ�IJ�࣬���õ؝M�㹤�I(y��)���Ƶ���Ҫ��