׃�l���g��늄ӈ��ЙC���ϵđ���
�������������һ�N���M��ʩ����׃�l���g������늄ӈ��ЙC����ʹ늄ӈ��ЙC�����Fܛ����ܛ�P�]���ܣ��ڸ��ƿ���Ʒ �|��ͬ�r���F���ܜp��Ч����
�������Ԅ��{��ϵ�y�У����І�Ԫ�Ĺ����|�����P��Ҫ��ÿ�����{ϵ�y�Č������ԡ��r�g����������r�g���Ŵ�����ͬ����ˣ�������І�Ԫ��늄ӈ�����Ҳ���и��N�����ٶ��c֮�������ǡ���늄��{���yһ���_���x�ͣ������ٶȡ��г̕r�g�������̶����o���M��ϵ�yҪ�Y��ֻ��ͨ�^�l���Ć��ӡ�ֹͣ��M��o��ֵ�������{�������ϵ�y����ʎ�����װl��늙C�����¹ʡ�����׃�lʽ늄��{���y�ܷܺ���Ľ�Q�@�����}��늄ӈ�����Ҫ���F���|���߾��ȵĿ��ƣ���������̖��С׃��Ҫ�����`�������F�ӑB푑��ã����ЙC���\���ٶȱ�횺Ϳ�����̖���ȳɱ�����Ҫ�˷�ϵ�y�o����ЙC��ֻ���Ե����\��ͨ�^�O�����{���ò��������o��ֵСƫ��@Ȼ��������׃�ٹ��ܵ�늄ӈ��������y�ԝM������Ҫ��ġ�
1��ϵ�y��Ҫ���c���乤��ԭ��
����������׃�l늄ӈ����������Ô��ֻ�׃�l����Ƭ�C���g������Ŀǰ�F�е�늄ӈ�������ʹ֮�������ܻ���׃���\�С��ӑB푑��á��{����λ���ȸߡ������Ժá������ʵ͡������L�����È��ϸ��ӏV�������c��
����1.1����Ҫ���c
����1)�������С
����ϵ�y�ľ�·�OӋ���Ӻ������������Ì��Ä�����·���Σ���ȫ�ɿ�������������Ҳ����׃�l늙C���~������������y�Ĉ��ЙC�����_��5-7�����ҡ�
����2)���F�����^������p��늙C��ͣ�Δ����p���y�Tĥ�p
����׃�l�����·ʹ�����^��ʼ�K�S������̖���yλ������̖ƫ�����m���{�����ɴ_������С�Ć�ͣ�Δ��팍�F��ߵĿ��ƾ��ȣ��Ķ����F�����^�������������ͣ�Δ��Ĝp�ٶ��p���y�T��ĥ�p��
����3)“ܛ����”��“ܛ�P�]”�ڴ_��������ص�ͬ�r�ɱ��⌦�y�T�ě_ײ
������������صĵ��ٶȝu�M�{���y�T�_�ȣ�������ܛ����ʹ����������p�١���ʹ�l�����ӴΔ��ܶ������������ϵ�yҲ��������늙C���@����׃�l��ܛ���ӡ�ܛ�P�]����ɫ���@һ���y�������y�Ԍ��F�Ĺ��ܣ������һ�w��׃�l���IJ��ö����Ԍ��F���ڽӽ��O����O��λ�Õr��׃�l���Ԅ��{��늙C��늵��l�ʺ�늉�������늙C�D�٣�������ٶ��������_λ�á�������T�Ԍ��y�T��ɵ��^�{�͛_ײ��ʩ����Ƅӹ��ܣ�ʹ���ЙC����ݔ���������h���������^�����O�����P�����ء�
����4)���ЙC���ɸ����y�T�ľ������ԣ�ʹ���^�麆�ε��y�T����ɏ��s�Ŀ���
�������ڏ��s�Ŀ����^�̣�����ϣ���y�T���_���c���|�����ٳɱ����������y�T�����ԣ��������ܿ���ģ�K�Ԅ��{��ȫ�г��^���е��\���ٶȣ���ȫ�г��\�Еr�g�֞�10�n��ÿһ�n���Բ�ͬ���ٶ��\�С�ͨ�^�����O��������O�á��@һ���ܱ��Q��“�г�—�ٶ�����”����Ҫ���Á������y�T�������ԡ�ͬ�r߀�߂�����y�T���������ԡ�
����5)���̶ܳȸߣ�����ܛ�������S���ɿ�
����׃�l늄ӈ��ЙC�����ء��г̡��ٶȾ��̿��{�������̖e�����s��Ʒ���}�AͶ�Y�����������ܛ��ϵ�yᘌ����������{���y���N���È��ϵ�Ҫ���_�l��ݔ����̖�˜ʻ�����4��20mA��1��5V;λ�÷�����̖�˜ʻ�;�ྀ���o;���÷�ʽ�ɬF�������O��;�i����;���ࡢ�^�ᡢ�^���ء��y���ȶ��ر��o;���п��T������늱��o�ȶ�헹��ܡ�
����1.2��ϵ�y����ԭ��
�����D1��������׃�l늄ӈ������Ĺ���ԭ��D��������׃�l늄ӈ������ɜp�������ֺͿ��Ʋ��֘��ɡ����Ʋ����ַ֞�늙C�����·�Ϳ��ƻ�·�·��
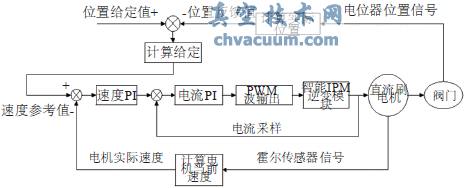
�D1 ���ЙC������ԭ��D
�����了�ι����^���ǣ�ݔ����̖(����ͨ����̖)��λ�÷�����̖��ͬ�r�M�����ܿ�����A/D�D�Q�·��CPU�������M�б��^���\�㣬ݔ��һ����ƫ���һ�µ��_�P��̖��һ���cƫ���С�ɱ����Ĕ�����̖ȥ늙C�����·��늙C�����·����늙C�\���ٶȺ��\�з��Ķ��_���B�m׃�ٿ��ƈ������_�ȣ����F�Ԅ��{����Ŀ�ġ�늙C�����·����늙C�^�d����·����������M�б��o��ݔ����������̖��RS485ͨ�Žӿ���������׃�l늄ӈ������c�ⲿ����ͨ�Ņf�h�M��ϵ�Ę˜�ͨ�Žӿڡ�������׃�l������ͨ�^�@ʾ�������o�������O���M����Nʹ�È��ϵ����܅�����CPU���������A������ͅ�����ָ�]������������
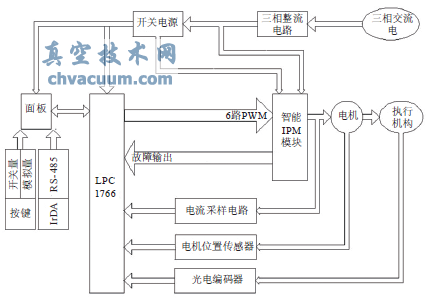
2��ϵ�yӲ������
����2.1��׃�l�����·
����׃�l���Ɔ�Ԫ��׃�l늄ӈ��ЙC���Ĵ��X������Ҫ�����ǽ���׃�l늄ӈ��ЙC�����Դݔ�룬����ݔ��Ľ����������늉��l�ʿɿص�ֱ��늣��M������׃�l늙C���\�У���Kݔ�����Є����������ṩ���c�����Ɔ�Ԫ��PLC��DCS��ģ�M�_�P����̖�ӿںͬF������ͨѸ�ӿڡ�׃�l���Ɔ�Ԫ�Ľӿ���D2��ʾ��
�D2 ׃�l����ԭ��
����׃�l��Ԫ�Ȳ����������{�������Ʊ��o�������֡��������ֹ��ܾͰ�ݔ�뽻��늽���������ȫ��������ֱ��늡��{�����ֵĹ����ǰѷ����ֱ���ͨ�^�_�P���l�����{����늙C��Ҫ��늉������Ʊ��o���ֲ�����SIEMENS�����M��DSP��̖̎�����c��Ҏģ�ɾ�����м��g���Г��˿��ơ����o��һ����Ԫ����ݔ����̖�IJɼ���PWM�}�_���εĮa���c���o����ݔ�����ǂ��΄ա����g��ֱ�����֞���ݞV������늙C���ُĸ����½��r��늙Cͨ�^��׃��·��늙C�Ą��ܻ����o׃�l������ʹ׃�l��Ԫ�Ȳ������gֱ��늉�׃�ߣ������ڴ�λ�ÿ�����늚��Ƅӆ�Ԫ������늙C�������������F�o���x܇�Ƅӹ��ܡ���׃�l늄ӈ��ЙC���г��˲���һ��λ�Â������⣬�]��Ҳ�o�����O�ٶȂ������������׃�l���g���кܶ�ܳ���Ŀ��Ƽ��g���ͨ���Ƽ��g��ֱ���D�ؿ��Ƽ��g���o������ʸ�����Ƽ��g�ȵȣ������đ���ʹ��׃�l�������µĽ���늙C�Ŀ��ƾ��ȡ����o�B����ָ���������^�ˌ�ֱ��늙C�Ŀ���Ч����늙C�������D���ƣ���׃�l��Ԫ���f��ֻ���׃ݔ��늉����ε����Ɍ��F��ͨ�^ݔ���l�ʵĄӑB׃�����Ɍ��F늙C��늙C���_ͣ����ȫȡ�������քӲ������ŷ����p�ٵȏ��s�b�á�
����2.2��׃�l늙C
����׃�l늙C�Ļ���ԭ��ͬ��ͨ����늙Cһ�ӣ�����ֿ��]��׃�l����ݔ���l���^�͕r��늙C�\���ٶ��½���늙C��ɢ��l���s��鐺�����������OӋ�r��늙C�ęCе�Y��������Ȧ�@���Ⱦ��M���˃���̎�������C��늙C���l�\�Еr�����\������a���İl����늙C�������ȣ���Ӱ�늙C������������
����2.3���C����b��
����׃�l��Ԫ��ݔ�����Ʈ���늙C�����D�������U—݆�b�Ì�늙C�����D�D׃��ݔ���S�����Dݔ�������Ӷ���Dʽ���y�T�����Ԇ�Ԫ�������B�U�b�ÿ��Ʊ��{���C����250NM����ݔ�����Ϻ����µķքe�����~�|݆-��|�U�S��M�Ϻ���ī�T�F��݆—��|�U�ĽM�ϣ����Пoĥ�p������Ч�ʺ㶨�ă����������ܡ���Cе���Ӳ��֘O�龫�ܣ��������ͣ����x1���ԃȵ�����С��70dB����ݔ���S����·���O���û����Б�Ԫ�����Á��ɼ�ݔ���S��λ����̖���������ͽo׃�l�����г�Ӌ��ͱ��o̎����
3��ϵ�yܛ���OӋ
��������׃�l늄ӈ�������ܛ���������֘��ɣ�늙C��ܛ�����˙C��Ԓܛ���Ϳ��Ƴ���ܛ����
����3.1��늙C��ܛ��
������Ҫ��Q늙C���D�ӷ����D���ٶȆ��}��ͬ�r߀�܉�����A���O���õ��|�l�l�������^���ء��^�ᡢ���D��ȱ�ࡢ������¼��ͼ��r���D���D�١�늙C�����r���f�o�����·��
����3.2���˙C��Ԓܛ��
������Ҫ�Á��O������׃�l늄ӈ��������õ�һЩ������
�������ЙC�����D���Á��O�����ЙC��ݔ�����_�P������ҪĿ�����m�����ЙC�����ڬF�����b��ʽ��ͬ����ɵ�ݔ��������
�������^�����ЙC�����S����̖Ҫ���c���Hݔ��λ��֮�g���`��ֵ�����^�^����Ʒ�|��׃��;���^�^С����������늄ӈ��ЙC������ʎ���L��̎����ʎ��B��ʹ���ЙC����늙C��l����p�ġ�ʹ��׃�l���g�����^���O����0.1��0.5֮�g���������l�����{����ʎ����r��
�������c�����ЙC�����Ե��_��ݔ��λ�����(С)�c��
�����M�ȣ����ЙC�����Ե��_��ݔ��λ�����(��)�c��
������ݔ���O�ã��Á��O���^����Ą������Ա��ڸ���ϰl���r���^����܌����ЙC����ijЩ��Bݔ��������ָʾʹ���߰l�F���ų����ϡ�
����ݔ����̖�������ɸ������ЙC�����ìF���Č��H��r����ݔ����̖�M���������Ա��C���ЙC���Ŀ��ƾ��ȡ�ݔ����̖�������ɸ������ЙC�����ìF���Č��H��r����ݔ����̖�M���������Ա��C�܉��ЙC����λ�à�B�挍�ķ����oʹ���ߡ�
�������D���o�r�g��ԓ�����Ǟ��˱��C늙C�ڽ��յ������D������r���Դ��֮�g���l����·��ͬ�rҲ�Ǟ��˱���������\�ӑT�Զ���Ɉ������l���������D�Ӷ�Ӱ��{��ϵ�y�������OӋ�ġ�
�������ϲ�ԃ���Á���ԃ����l���Ĺ�����r���Է���F���S�o�ˆT���r�l�F���ų������[����
�����֏��O�ã����˷���F���{ԇ��ʹ�ã����l���`�������`�O�õ���r�r������ԓ���ܻ֏ͳ�ʼ�O�á�
�����^���ر��o�O�ã�ͨ�^�xȡ늙C���ֵ��Ӌ���늙C���r�ij�����r��������̎���������ЙC����ݔ�������ٷֱȵ���ʽ�@ʾ������ʹ�����O��ԓ������ݔ�����ش����O��ֵ���t�l���^���ر��o����늙Cֹͣ�D�ӣ�ֱ���^���ؠ�B�����
�����D���O�ã�ԓ�������܉��w�F׃�l늄ӈ��ЙC�����c������Ҫ�����������O�����Lj��ЙC�������r�����ݔ���D�١�ԓ�D�ٌ��C������Kݔ�����أ��г̕r�g�Լ����ƾ��ȶ��кܴ��Ӱ푡�ͨ���O���������~���D�ٵ�50%-120%֮�g��
��������λ���O����ԓ�������܉��w�F׃�l늄ӈ��ЙC�����c����Ҫ����֮һ���O�����Lj��ЙC���ĵ����_ʼ�����׃�������cλ�á�
�����p��λ���O����ԓ�������܉��w�F׃�l늄ӈ��ЙC�����c����Ҫ����֮һ���O�����Lj��ЙC���ĸ����_ʼ�����׃�������cλ�á�
��������ٶ��O����ԓ�������܉��w�F׃�l늄ӈ��ЙC�����c����Ҫ����֮һ���O�����Lj��ЙC���܉��C���������r��͵��D���ٶȡ�
����ͨ�^��“�D��”��“����λ��”��“�p��λ��”��“����ٶ�”�������{�������Ժ��`����O��һ�l���ЙC����/ͣ������������D3��ʾ���ԝM�㲻ͬ���È��ό�늄ӈ��ЙC����Ҫ��
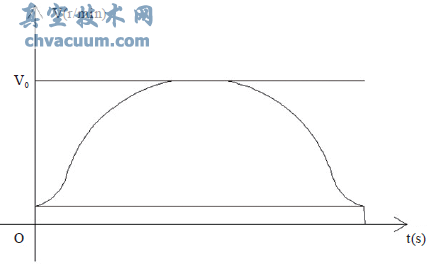
�D3 늄ӈ��ЙC����/ͣ��������
����3.3 ���Ƴ���ܛ��
���������O���õą�����һЩ���r��Ϣ��Q�����ЙC���Ŀ��Ʋ��Ժ̈́������ஔ��늄ӈ��ЙC���Ĵ��X���ǛQ����������Ʒ�|���ӵ��P�I��
4���Y���Z
�������Ľ�B��׃�l���g������늄ӈ��ЙC���ϵ�һЩ���ݣ��@�Ǯ��������Ӽ��g���Ԅӿ��Ƽ��g�lչ�Լ����������g�lչ�ĽY�������и߶����ܻ����F����������ʹ�ú��������c��Ҳ�Ǯ������a�^�̿��Ƽ��g�lչ����һֱ��ͳ����ġ�