�����y�T��λ�������㷨�ĸ��M
���������T���y�T��λ���aƷʹ���岽�_�P�����㷨�����ڵ��yλ���ƕr��ʎ�Δ��࣬���yλ���ƕr�{���r�g�L��������岽�_�P�����㷨�M�и��M�������M���㷨�Ŀ���Ч���c�岽�_�P�����㷨����Ч���M�Ќ��ȣ��㷨���M���{���r�g�pС1.6s�����{���pС12.8%�����F�˸����ٜʴ_���y�T��λ��
���������y�T��λ���������{���y����Ҫ����֮һ�����Ը����y�T�����ԣ���߿��Ƶľ��ȡ��ٶȺ����ӿ��Ƶ��`���ԡ������y�T��λ�����п��ƾ��ȸߡ��ɿ��Ժá������������ļ������\��͙z�y���ܵȃ��c����ʯ�͡������������ұ��ȹ��I��I�����������аl�]��������������á�
�����҇��������y�T��λ�����о��^���У�ȡ����һЩ�ɹ��������㷨�������y�T��λϵ�y�ĺ��ģ��㷨�ă��ӌ�ֱ��Ӱ��y�Ķ�λ���ȺͶ�λ�ٶȡ��ڇ��ȵĺܶ��y�T��λ���aƷ�У������㷨�����岽�_�P�����㷨���P��ᘌ��y�T��λ���岽�_�P�����㷨���о����M��ּ�ڌ��F���õĿ���Ч����
1�������y�T��λ������ϵ�y
����1.1�������y�T��λ������ԭ��
������λ���Ĺ���ԭ����D1��ʾ����λ������4��20mA�Ę˜������̖���D�Q���yλ�O��ֵ�����ЙC����ֱ�����D�nj��Hλ��ͨ�^�B���b���D�Q��Ƕ�λ�ƣ�����λ�Â������y�ã�������̎������̎���������H�yλ����ֵ���O��ֵ�M�б��^���z�y��ƫ�����ƫ���С�ͷ���ݔ���}���{��ָ�����y������y������ָ���{��Ĥ�^�M�������Ś�����
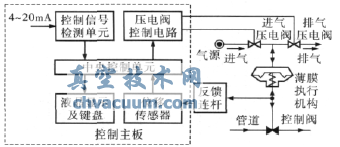
�D1 �����y�T��λ������ϵ�y��D
1.2������y����ԭ��
��������y�ǿ��������ֱ�ӿ��ƌ��������܅������£�
��������늉� 24VDC��������� С��10μA���S����� 0μA��푑��r�g С��20ms����� С��100nF�������≺ 12��800kPa������ 130L/min�������ض� -30��+60�档
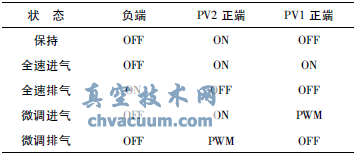
��������yģ�K���Ãɂ��_�Pʽ����y(PV1��PV2)�̓ɂ������y���ɿ��ƚ�·����������ͨ�^�����㷨��ݔ��PWM���Ɖ���y�Ą������Ķ����F�{���y���M�⡢�Ś��c���֠�B���M�⡢�Ś��c���֠�B��������y�Ġ�BҊ��1��
��1 ����y��ʧ늿��Ơ�B
2�������㷨
2.1���岽�_�P�����㷨
�����岽�_�P�����㷨����Bang-Bang���ƺ�����PWM���ГQ�ķ����������yλ�O����̖�c�yλ������̖֮�g��ƫ���С������������PWM��̖���Ɖ���y���Ķ����F�Ś⡢�M��ͱ��֠�B�����yλƫ���^��r������yȫ�_���{���yȫ���M�⣬�yλѸ�ٵ��_�O��λ�ã����F���{;���yλ�ӽ��O��λ�Õr����һ�������Ȱ��O�������ں�ռ�ձȣ�ݔ��PWM������̖���M���{;������{���y���O��λ�ø����l������ʎ���O�����^����ε����ƫ��λ�����^�����ȕr���P�]����y��ʹ�yλ���֮�ǰλ�á�
����PWM������̖���yλƫ��֮�g���Pϵ�飺
�����岽�_�P�����㷨������D2��ʾ��
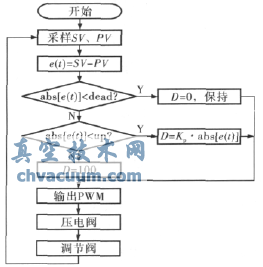
�D2 �岽�_�P�����㷨����
����2.2�����M���岽�_�P�����㷨
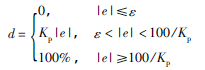
����������r�£��_�P�y�ĵ�Ч�_�ڽ���e�cռ�ձ�֮�g���Pϵ�Ǿ��Եģ������ډ���y�Ĝ����Ժ��yо�T�ԣ����ƽ���m40ms���ϲ��ܱ��C�yо�_�������ƽ���m10ms���ϲ��ܱ��C�yо�P�]��ռ�ձ�������ʽ�飺
����ʽ��da———����ݔ��ռ�ձ�;ds———����ݔ��ռ�ձ�;dmin———����y��������Сռ�ձ�;dmax———����y�������ռ�ձȡ�
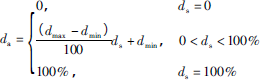
����������ӱ�Ĥ�{���y�{��Ч�������c�����yλ�r�����Һ͚�Դ����׃С�������ڵ��yλ���ԣ�����ͬ�ij���}�_�r�g�ȳ���Ě��w���١�����Ƹ��yλ�r푑��ٶȣ�ʹPWM��ռ�ձ��S�yλ�����߶��Ӵ����岽�_�P�㷨ռ�ձȵĻ��A�ϣ������S�yλ��������׃����ռ�ձȣ����M����岽�_�P�㷨ռ�ձȵ�Ӌ�㹫ʽ�飺
d*=da+KdPV (3)
3�����������
�������Ș������Ԅӻ��x���ŏS���a�������y�T��λ��SEPP4000�����岽�_�P�����㷨�����O��ֵ��10%׃����90%�r���yλ�����λ��ݔ��������늉�������788��632mV;���O��ֵ��90%׃����10%�r���yλ�����λ��ݔ��������늉�������632��784mV��
�����M�п��d���]�h����ԇ�����M����岽�_�P�����㷨�Ŀ���Ч���c�˜��岽�_�P�����㷨�Ŀ���Ч���M�Ќ��ȡ��yλ������̖푑�������D3��6��ʾ��
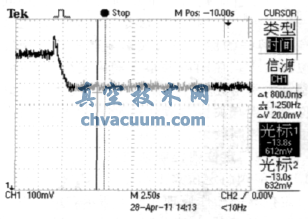
�D3 �˜��岽�㷨�M���B��푑�����
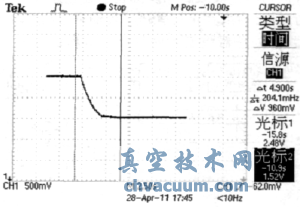
�D4 ���M�岽�㷨�M���B��푑�����
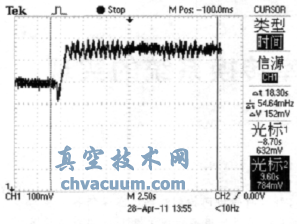
�D5 �˜��岽�㷨�Ś��B��푑�����
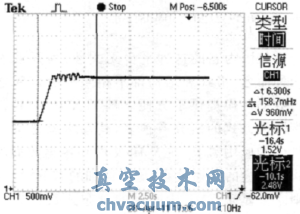
�D6 ���M�岽�㷨�Ś��B��푑�����
�����{���r�g�c���{���ı��^Ҋ��2��
��2 ���������^
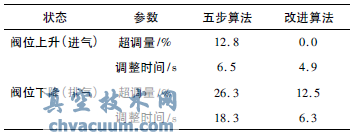
����ͨ�^���^�l�F�����M����岽�_�P�����㷨�{���r�g���̣��ڸ��yλ�r���F�������@��
4���Y���Z
����������ӱ�Ĥ�{���y�����c�����yλ�r�������M���٣��≺С�����ښ��w�Ŀɉ��s�ԣ��{���r�g�̵������׳��F���{�F��;���yλ�r���{���r�g�L�������M��࣬�≺�����������P��ͨ�^�岽�_�P�����㷨�ĸ��M�����^���Ч�����ȣ���Ч�s�����{���r�g���pС�˳��{��������Ч�������롣��PWMռ�ձȵ��������ǽ�Q��ӱ�Ĥ�{���y�ߵ��yλ����Ч��ȱ�c����Ч�����������������y�T��λ�������㷨�о�֮���b��