��(gu��)�a(ch��n)���������y�T��λ�����O(sh��)Ӌ(j��)
�����������y�T��λ���ѽ�(j��ng)�ɞ�F(xi��n)���^(gu��)�̿���ϵ�y(t��ng)���P(gu��n)�I�O(sh��)��֮һ�������M(j��n)һ����߶�λ���Ŀ������ܣ�������һ������ȫ���ʽ�����y�T��λ������B��ԓ�λ������Ҫ�M�ɲ��ֺ��P(gu��n)�I���ļ��g(sh��)���˶�λ�����ñ���ʽ����y������(d��ng)�Ŵ��c�(q��)��(d��ng)�������������m��(y��ng)�ȶ�N���ܿ��Ƽ��g(sh��)������������y�T��λ���Ķ�λ���ȺͿ��ɔ_���ܡ�ԓ��λ�����й��ĵ͡����ɶȸߺ��\(y��n)�пɿ��Ժõȃ�(y��u)�c(di��n)���Ƅ�(d��ng)�ˇ�(gu��)�a(ch��n)���ʽ�����y�T��λ���a(ch��n)�I(y��)�İl(f��)չ��
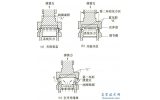
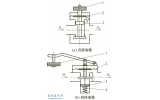
����Ŀǰ���ڌ�(du��)��ȫ���������^��Ҫ��Ĺ����I(l��ng)���У��������y�T��λ���đ�(y��ng)��Խ��(l��i)Խ�V�������չ���ԭ������(sh��)�F(xi��n)��ʽ�IJ�ͬ�������������y�T��λ�����w�Ϸ֞释�����C(j��)�ʽ�����y�T��λ��������_(k��i)�P(gu��n)ʽ�����y�T��λ���͉�늱���ʽ�����y�T��λ��3����͡������a(ch��n)Ʒ�ڹ��̑�(y��ng)�ú��Ј�(ch��ng)��(j��ng)��(zh��ng)�и�����ɫ�����У��ԉ���_(k��i)�P(gu��n)ʽ�����y��λ���^������[1-2]��
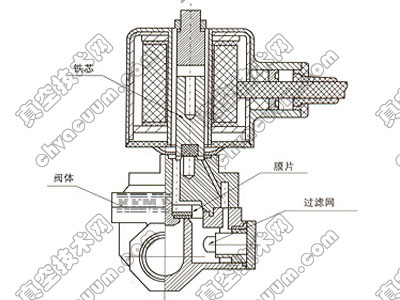
�����������x���F(tu��n)���Ƶ�ȫ���ʽ�����y�T��λ�������ñ���ʽ����y����I/P�D(zhu��n)�Q�͚��(d��ng)�Ŵ���Ӳ���·�O(sh��)Ӌ(j��)ͻ��������������w���ֲ��Ã�(y��u)���O(sh��)Ӌ(j��)��������Ӳ���·����������ġ�ԇ�(y��n)�C������4mA���������ҳ��F(xi��n)10%����(d��ng)����r�£�Ӳ���·���������������������˶�λ�������Ŀɿ��ԡ�
1�����w�O(sh��)Ӌ(j��)
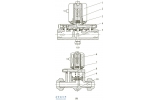
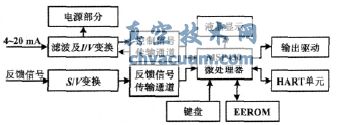
��������ȫ���ʽ�����y�T��λ����ϵ�y(t��ng)��ǰ���c�Դ������(λ�Ƃ������c�����B�U��)��ݔ���(q��)��(d��ng)��I/P�D(zhu��n)�Q(����y)���˙C(j��)����(LCD�@ʾ�c���I)�͈�(b��o)��ݔ���Ȏײ��ֽM��[3-4]������(g��)ϵ�y(t��ng)�Y(ji��)��(g��u)��D1��ʾ��
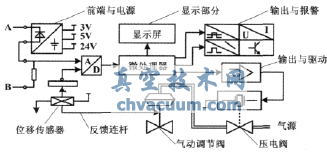
�D1 �����y�T����Y(ji��)��(g��u)�D
������(l��i)����λ�C(j��)��4��20mA(��������ʽ��̖(h��o))�����̖(h��o)�����÷�(w��n)�����O�����I/V�D(zhu��n)�Q��һ��(j��)��(ji��n)�η�(w��n)�����S��ͨ�^(gu��)DC-DC���Է�(w��n)��ģ�K��늺ɱû��_(k��i)�P(gu��n)ʽ����ģ�K���քe�a(ch��n)��3V��5V��24V�ȎM늉�����CPU�����O(sh��)Ӳ���·������y�(q��)��(d��ng)�·ʹ�á�ͬ�r(sh��)�����Â������·���@ȡ�cݔ�����i�ʾ��Ա����P(gu��n)ϵ��늉���̖(h��o)��ԓ��̖(h��o)ͨ�^(gu��)ǰ��(sh��)��(j��)��ݔͨ������MSP430̎����Ƭ��A/D�˿ڻ����A/D�D(zhu��n)�Q���˿ڣ���ɿ�����̖(h��o)�IJɘ��c��(sh��)��(j��)̎����
�������(d��ng)��(zh��)�ЙC(j��)��(g��u)�yλλ�Ʒ�����ͨ�^(gu��)�����B�U���X݆�M�;���λ��ʽ�λ����(l��i)���λ��-늉�׃�Q����ͨ�^(gu��)������ݔͨ������ɷ�����̖(h��o)�IJɘ��c̎������CPU�У���������̖(h��o)�ɘ�ֵ�c������̖(h��o)�ɘ�ֵ�M(j��n)�б��^���ٽ�(j��ng)�^(gu��)һϵ�Џ�(f��)�s�Ŀ����㷨���a(ch��n)������(y��ng)��С��ݔ����������ԓ������ͨ�^(gu��)MSP430Ƭ��ģ�K��(sh��)�F(xi��n)��(sh��)�r(sh��)ݔ��������(j��ng)�^(gu��)�ɾ��ܷŴ������M�ɵ��(q��)��(d��ng)�·ֱ���(q��)��(d��ng)����y�͚��(d��ng)�Ŵ��������{(di��o)��(ji��)���(d��ng)��(zh��)�ЙC(j��)��(g��u)���г̣����y�T���_(k��i)�ȡ�
����LCDҺ���@ʾ��4��(g��)���I�t�Ƕ�λ��“��-�C(j��)”��Ϣ�͔�(sh��)��(j��)�����Ĵ��ڣ��������׃�������P(gu��n)����(sh��)�ij�ʼֵ�O(sh��)�á���(sh��)��(j��)�M�B(t��i)����(sh��)�r(sh��)�@ʾ���T��ܡ�ݔ����(b��o)��ģ�K���ϵ�y(t��ng)�����O(ji��n)�أ����a(ch��n)���h(yu��n)�ˈ�(b��o)��ݔ����
�������⣬����������Ҫ��(sh��)��(j��)�Ĵ惦(ch��)������������Ƭ��EEROM��������ģ�MI2Cͨ�ż��g(sh��)�c��Ƭ�C(j��)��(sh��)�F(xi��n)�p��(sh��)��(j��)������
2��Ӳ���·�O(sh��)Ӌ(j��)
���������y�T��λ��Ӳ���·ԭ����D2��ʾ[3]��
�D2 ��λ��Ӳ���·ԭ��D
��������Ԫ�·�M�ɼ��������¡�
�����ٞV����I/V׃�Q�·���Դ�Ϳ�����̖(h��o)�Ĺ�ͬݔ��ˣ�������(g��)Ӳ���·��ǰ�˺ͻ��A(ch��)���O(sh��)Ӌ(j��)�в��ø����ܞV��������ϵ��迹���@늸У���Ч������4��20mA�����̖(h��o)���·���ϵĸ��N����(d��o)�ɔ_���l�ɔ_��ͬ�r(sh��)������Ф�ػ����O�ܡ����������ȣ�ʹǰ��ݔ��ͨ���������õĶ��α��o(h��)���ܡ�
�������ڶ�λ���Դ�·������4��20mA����h(hu��n)·��(n��i)����ˣ��x���˷�(w��n)�������������{����^��(qi��ng)���R�{���O�ܣ���(sh��)�F(xi��n)��I/V�D(zhu��n)�Q���@�Ӽ�ʹݔ��������^����(n��i)׃���r(sh��)��ݔ��늉���Ȼ�܉�(w��n)����Ҏ(gu��)��ֵ������m(x��)��DC-DC׃�Q������ģ�K�ṩ�˱��^��(w��n)����ݔ��늉�Դ��
�������Դģ�K�����ʽ�������y�T��λ����Ҫ3V��5V��24V�ȎM늉�Դ��3��5V늉�׃�Q�����˾����^��ݔ�뷶�����^���D(zhu��n)�QЧ�ʵ�늺ɱ���ɣ�����кܸߵ�����D(zhu��n)�QЧ��(һ����90%����);24V�������քt������DC-DC�_(k��i)�P(gu��n)�������g(sh��)�����ø����ܡ����Č���оƬ��������O(sh��)Ӌ(j��)��(sh��)�F(xi��n)���Դģ�K���þC���{(di��o)�Ƽ��g(sh��)�����H�������o�B(t��i)��������ģ����Ҍ�(sh��)�F(xi��n)��ݔ�����ֵ����(j��)ؓ(f��)�ɴ�С�Ԅ�(d��ng)�{(di��o)���Ĺ��ܡ�
�����ۙz���cǰ��ݔ��ͨ�����õͶ˙z�y(c��)����ͬ�r(sh��)��(li��n)��һ��(g��)�������Üض����Եľ��ԙz��Ԫ�����ԫ@ȡ�c������̖(h��o)���н��ƾ����P(gu��n)ϵ��늉�Uab��ԓ늉�ͨ�^(gu��)���(d��ng)�Ŵ��{(di��o)��������̎�����M(j��n)�вɘ��c��(sh��)��(j��)̎����
�������˜p�ٜ�Ư��(du��)ϵ�y(t��ng)�y(c��)�����ȵ�Ӱ푣�����z�y(c��)����x���˟᷀(w��n)���Ժá�Ư��С�Ŀ��~�Ͻ�z�����������⣬�O(sh��)Ӌ(j��)�в��þC�ϴ�ʩ�������������˹�ģ�ɔ_�����ɔ_;ͬ�r(sh��)���������a(b��)����裬ʹݔ����̖(h��o)��ƫ���`��͵���С��
������λ�÷����·����Ҫ�����Ƿ�����̖(h��o)�ľ����{(di��o)���c�Ŵ�λ�����ƵČ�(sh��)�|(zh��)���]�h(hu��n)ؓ(f��)�������ƣ���ˣ���(sh��)�F(xi��n)λ��-늉�׃�Q�ķ����C(j��)��(g��u)Ҳ�Ƕ�λ����Ҫ�ĽM�ɲ��֡�
����λ��-늉�׃�Q�����ɷ����B�U�������X݆�M�;��܌�(d��o)������λ���ȽM�ɣ���Ҫ��ɚ��(d��ng)��(zh��)�ЙC(j��)��(g��u)�yλ�����г̵�늉���̖(h��o)���D(zhu��n)�Q�����У������X݆�M���Ԍ����(d��ng)��(zh��)�ЙC(j��)��(g��u)�г̵Ľ�λ�ƷŴ����ɱ�����߷�����̖(h��o)�ľ��ȡ�������/���г̵�һ���Ԍ�(du��)���ƾ��Ⱦ����^��Ӱ푣����Ԍ�(du��)��ˇ�O(sh��)Ӌ(j��)�c���ܼӹ����g(sh��)������^��Ҫ����ܛ����(sh��)�F(xi��n)���ֲ�ȡ���a(b��)����ʩ��
������ݔ���(q��)��(d��ng)���֣�ʹݔ����(sh��)��(j��)�܉�?q��)��r(sh��)ͬ�����£�����ͨ�^(gu��)�߹�ģ���Ʊȵĵ����(q��)��(d��ng)��Ԫ��I/P�D(zhu��n)�Q������Ɍ�(du��)����y�͚��(d��ng)�{(di��o)��(ji��)�y���(q��)��(d��ng)���ơ�
���������·�������I����(f��)λ��Һ���@ʾ��Ƭ��EEROM�Ȇ�Ԫ�·��Ƭ��EEROM�U(ku��)���˴惦(ch��)�������������I�P-LCD����-�C(j��)�������ڣ�ʹԓ�a(ch��n)Ʒ���O(sh��)Ӌ(j��)�c�����������ܻ������Ի���
3��ܛ���O(sh��)Ӌ(j��)
����3.1��ϵ�y(t��ng)ܛ��
���������y�T��λ���ij�����Ҫ�ɹ��������ƺ�ͨ��ܛ���Ȏײ��ֽM�ɡ����У�PID���ƺ�HARTͨ�ų���M����������[4-5]��
��������ܛ����Ҫ���ϵ�y(t��ng)�O(ji��n)�غͳ�ʼ���΄�(w��)��ͬ�r(sh��)߀����CPU�����NƬ�����O(sh��)�����оƬ�ȵ��O(sh��)���c��ʼ����ϵ�y(t��ng)�ԙz��PID����(sh��)����������-�C(j��)��Ϣ�����Լ����ψ�(b��o)��ݔ�����o�����ܡ�
��������ܛ����ܛ���O(sh��)Ӌ(j��)�ĺ��ĺ��P(gu��n)�I�h(hu��n)��(ji��)����Ҫ�����̖(h��o)��(sh��)�r(sh��)�ɘӡ���(sh��)��(j��)̎���Ϳ����㷨̎���Ⱥ����΄�(w��)��
����ͨ��ܛ�����΄�(w��)�����ɲ��֣�һ�����Ƕ�λ���c��λ�C(j��)������֮�g��ѭHART�f(xi��)�h�İ��p��ͨ��;��һ������CPU�cƬ��EEROMоƬ֮�g��ѭI2C�f(xi��)�h�Ĵ��Д�(sh��)��(j��)ͨ���Լ�LCD�@ʾ�ȡ����߶��������ķ�ʽ���������Дʽ�M(j��n)�Д�(sh��)��(j��)�İl(f��)�ͺͽ��գ��ȴ_���˔�(sh��)��(j��)�Č�(sh��)�r(sh��)��ݔ���������CPU����Ч�ʡ�
�������������̈D��D3��ʾ��
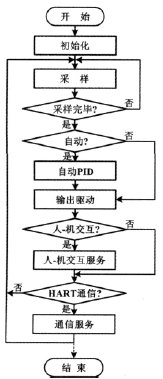
�D3 ���������̈D
����3.2��HARTͨ��
����HARTͨ����һ�N���p����ͨ��ģʽ���������O(sh��)���������͔�(sh��)��(j��)�Ă�ݔ���������đ�(y��ng)��ʽͨ�š��������CPU������Ч�ʣ���λ�C(j��)����MSP430�Ĵ���ͨ��ģ�K�����Дʽ�M(j��n)�������c��(sh��)��(j��)���İl(f��)���c���ա�
�����ڽ����Д�����У���λ�C(j��)��(du��)��λ�C(j��)����M(j��n)�н��ա��R(sh��)�e���Д��Ƿ���յ����_��ǰ��(d��o)���Ͷ����ַ��Լ��ַ��g���Ƿr(sh��)�����O(sh��)���յ�����Ϣ������ͣ���l(f��)�͎�����(y��ng)������ͻ�l(f��)���ȣ�����������Ϣ�������ಿ�֣�ֱ�������ꮅ��һ�������ꮅ���l(f��)���Д����㌢Ҫ�l(f��)�͵đ�(y��ng)������(sh��)��(j��)����������l(f��)�;��档��(d��ng)�ѽ�(j��ng)����朽�����������S�l(f��)�͕r(sh��)��CPU�Ԅ�(d��ng)����(d��ng)��Ϣ��(sh��)��(j��)�İl(f��)�ͣ����l(f��)���ꮅ����F(xi��n)�e(cu��)�`���t�M(j��n)��Kֹ�l(f��)�͠�B(t��i)�����һ������Ľ��Q��ÿ�����ꮅ�����(sh��)��(j��)�����ֹͣ�����ϵ�FSK�d����̖(h��o)���Ա����������O(sh��)�䡢վ�c(di��n)ռ��ԓͨ�ž�·��ͬ�r(sh��)�����˜pС�`�a�ʣ�ͨ���в�����“��ֱ+ˮƽ”��У�(y��n)�����������ͨ���|(zh��)����
����HARTͨ���Д����������D4��ʾ��
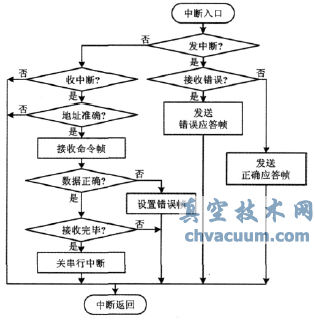
�D4 �Д�������̈D
4���P(gu��n)�I�����ļ��g(sh��)
����4.1�������ļ��g(sh��)
��������ʹ��λ����4mA������������ĘO�ޗl���������������ɿ��\(y��n)�У���ϵ�y(t��ng)�O(sh��)Ӌ(j��)�в�ȡ��һϵ�оC�ϴ�ʩ���Խ���ϵ�y(t��ng)���ġ�����Ҫ̎����ǰ��I/V׃�Q���^(gu��)�̵������p�Ć�(w��n)�};��Σ����c(di��n)���õ��ļ����\(y��n)�ŵ��x�ͺͅ���(sh��)ƥ�乤��;����ڳ����O(sh��)Ӌ(j��)�в�����“˯��+�Д�����”ģʽ[6-8]��
������(j��ng)�^(gu��)�C�Ϝy(c��)ԇ��ϵ�y(t��ng)��������������������Ľ�����3mA���ҡ�
����4.2�����m��(y��ng)PID�����㷨
�������(d��ng)��(zh��)�ЙC(j��)��(g��u)���y�T��һ��(g��)���͵ć�(y��n)�طǾ��ԡ������Ŀ��ƌ�(du��)��Ҫ��(sh��)�F(xi��n)���_��λ(��λ����0.5%)�������y���^����Ҫԭ�����ڣ���ͬҎ(gu��)��Ě��(d��ng)��(zh��)�ЙC(j��)��(g��u)���y�T����ָ��(bi��o)����(sh��)������ܴ�Ʃ���(zh��)�ЙC(j��)��(g��u)���г̡�Ħ�����͕r(sh��)�ӵȣ�������ͬһ��ϵ�y(t��ng)���S���r(sh��)�g�����ƣ�ijЩ���܅���(sh��)Ҳ��(hu��)�l(f��)���^��ĸ�׃��
������(du��)�ˣ��O(sh��)Ӌ(j��)�в�����PID���m��(y��ng)�����㷨��ԓ�㷨���к�(qi��ng)�����m��(y��ng)�������������H��ʼ����(sh��)�܉��ھ����Ԅ�(d��ng)�����������yλ�{(di��o)��(ji��)�Ϳ����^(gu��)�̞����ϵ�y(t��ng)���R(sh��)�����m��(y��ng)���ơ�����(j��)���ƌ�(du��)�����ԅ���(sh��)��׃�����ھ���(sh��)�r(sh��)�{(di��o)��PID���Ʋ��Ժ�KP��KI��KD�ȿ��ƅ���(sh��)ֵ�������푑�(y��ng)�ٶȡ���λ���ȺͿ��ɔ_����[9]��
5���Y(ji��)���Z(y��)
�����S�������;W(w��ng)�j(lu��)���g(sh��)�İl(f��)չ���܉�?q��)��F(xi��n)�h(yu��n)�̿��Ƶ��������y�T��λ���ѽ�(j��ng)�ɞ�F(xi��n)���^(gu��)�̿���ϵ�y(t��ng)�еĺ��IJ���֮һ����ˣ��l(f��)չȫ���ʽ���������y�T��λ��������Ҫ�đ�(zh��n)�����x��
�������(xi��ng)Ŀ���аl(f��)�ĉ�늱���ʽ�����y�T��λ�����ڌ�(sh��)�����ͮa(ch��n)Ʒ��ԓ�a(ch��n)Ʒ���Ѓ�(y��u)���ij��������ܺͺܸߵ����m��(y��ng)��������;�䪚(d��)�صĆ�ֻ����y�O(sh��)Ӌ(j��)�����H����ˮa(ch��n)Ʒ�\(y��n)�еĿɿ��ԣ�Ҳ���������a(ch��n)�ɱ��������ˮa(ch��n)Ʒ���Ј�(ch��ng)��(j��ng)��(zh��ng)������ԓ�a(ch��n)Ʒ���аl(f��)�����Ƅ�(d��ng)��(gu��)�a(ch��n)����ȫ���ʽ�����y�T��λ���a(ch��n)�I(y��)�İl(f��)չ���˷e�O���á�
�����īI(xi��n)
����[1]������.�Ԅ�(d��ng)����ԭ��[M].3��.��������(gu��)�����I(y��)�����磬1999.
����[2]�L(zh��ng)�����ۣ���������.����ʽ�y�T��λ��SVP3000Alphaplus���_(k��i)�l(f��)[J].����x���c�Ԅ�(d��ng)����1998��2(6)��65-69.
����[3]����.ZPZD3100�������y�T��λ����ԭ���c�O(sh��)Ӌ(j��)[J].�Ԅ�(d��ng)���x����2008��29(11)��46-47.
����[4]�ֻ�.����늚��y�T��λ�����о��_(k��i)�l(f��)[D].�������W(xu��)��2003.
����[5]�ִ�܊.����HART�f(xi��)�h�ĵ�������늚��y�T��λ��[D].�������W(xu��)��2006.
����[6]�����.MSP430ϵ��FLASH�ͳ�����16λ��Ƭ�C(j��)[M].�������������պ����W(xu��)�����磬2002.
����[7]κС��.MSP430ϵ�І�Ƭ�C(j��)�ӿڼ��g(sh��)��ϵ�y(t��ng)�O(sh��)Ӌ(j��)��(sh��)��[M].�������������պ����W(xu��)�����磬2002.
����[8]���l(w��i)���������.MSP430��Ƭ�C(j��)Flash�惦(ch��)�������Լ���(y��ng)��[J].��Ƭ�C(j��)�cǶ��ʽϵ�y(t��ng)��(y��ng)�ã�2001(4)��38-41.
����[9]�����A.����PID���Ƽ��䑪(y��ng)��[M].2��.�������C(j��)е���I(y��)�����磬2003��8-10.