��Ƭ�C����ϵ�y���y�T��λ���еđ���
1��ϵ�y����ԭ��
�����y�T��λ���Ŀ���ϵ�y���õ���89C51����ĵĆ�Ƭ�C����ϵ�y,�����Ձ����{�������O���y�T�_�ȵ������̖(4��20mA) ,���@����̖�c���{���y�y�U�������Č��H�_����̖�M�б��^,��� ̎�����õ�һ��ƫ����̖,�������@����̖ȥ���Ɖ���y,ʹһ�����ĉ��s�՚⽛�^����y�M�뵽�{���y�Ĉ��ЙC���Ě���,�Ƅ��yо���Ƅӻ��D��, �Ķ��_���yо�Ĝʴ_��λ��
2��ϵ�y�Ļ����M��
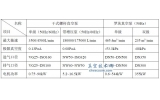
������ϵ�y����89C51��Ƭ�C, A/D�D�QоƬADC0808 ,�ɾ��̵��I�P���@ʾ�ӿ�оƬ8279 ,���п��T�����ܡ��Դ늉��O�y��EEPROM ���ܵ� X25045 оƬ�Լ��˜�RS2232 �ӿ��D�QоƬ MAX232 �M�ɻ���ϵ�y��
3��A/D�D�Q�·
���������yо���Ƅ��ٶȺ���,��ͨ�^�yλ�����U�����λ���Ą��|�cݔ������̖�Ǿ�׃��̖,��������ADC0808 ��100 μs ��ģ���D�Q�r�g���f,���ஔ��,�����҂���ǰ��ͨ���Пo���O�òɘ�/ �����������������F����늴ż����ĸɔ_,�҂����Ô��֞V������������ɘ�ϵ�y�����ڸɔ_��ɵ��`��@���ں���ij����OӋ��Մ����
4���Դ�O�y�·��RS2232 �ӿ��D�Q�·
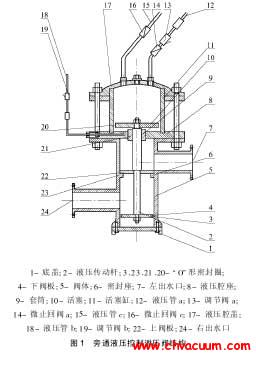
�����D2�е�X25045��һ�N���͵�“���T��”�� EEPROM �惦оƬ,������늉��O�y��“���T��”���r����EEPROM ���N���ܡ�X25045߀��89C51�ṩ��늏�λ,�������Ɂy��늉�ʧ���r���ӃȲ���“���T��”�·�ԏ��Ɔ�Ƭ�C��λ,ʹ������^�_ʼ���С�X25045 ���õ�512 �ֹ�EEPROM �惦��Ԫ,���S�r������N��Ҫ����,�@ʹϵ�y��늺���Ҫ���������Gʧ��
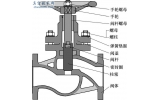
5���{���y�_���@ʾ���OӋ
����ͨ�^��ʽ(1) ,�҂����Ԟ��y�T��λ�����λ���ڬF���c�yо�����U���B�ӎ������㡣����λ��������г̾��x�c�yо������г̾��x�Dz�������ͬ��,���҂�Ҫͨ�^��׃�Cе�Y��ʹ�yо������г��c�λ��������г���ȫƥ�����ஔ���y��,���Կ��Ը������H���b�r���yо������г̵�X1 ����QĬ�J��H ֵ,����С�г̕r���X2 ����QĬ�J��h ֵ���@�ӾͿ������yо������г̾��xС���ҽӽ��λ��������г̾��x�ėl����,�oՓ�yо������г̾��x�Ƕ���,�����Ԝʴ_�y���yо���_�ȡ�
6���Y���Z
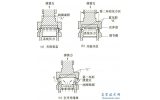
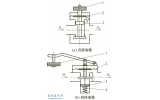
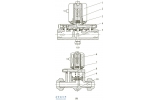
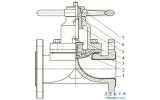
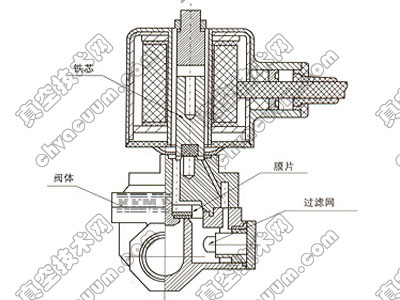
��������ԭ���ęCе��ƽ��ʽ��λ��ƽ��ʽ�y�T��λ��,��Ƭ�C����ϵ�y���õ��y�T��λ���Ќ��@����߶�λ���Ŀ��ƾ���,���Ҳ�����Q�㲿��,��ֻͨ�^���I�����p�ظ�׃�{���y�����������Լ��г̡�ͬ�r�����Cе��ƽ��ʽ��λ��ƽ��ʽ�y�T��λ���ڹ�����ͨ�^�����ŷſ՚���_���{���M����ЙC�����ҵĚ≺,��Ƭ�C���Ƶ��y�T��λ������ʡ�����ĉ��s�՚⡣
��������,ͨ�^MAX232���H���Ԍ��F��Ƭ�C����ϵ�y�cPC ֮�g��ͨ��,���ҽ���PC ߀�Ɍ��F���Ĕ����M�и�����s��̎��,ʹԓ��λ����ʹ�÷������ԔU��