���ʽ�y�T��λ��������������������
�������ʽ�y�T��λ�����ЙC���N��࣬����ƅ��������^�������y�ą��������������]���������܉�ӳ���ЙC�����|���Ե���Ҫ�������҂�����ą���������������ͨ�^�����ЙC�����_�h�yԇ���������yλ����\���ٶȣ�����^�_��;������αƽ��ͷֶβ��ҵķ���������������Ŀ��λ�õ����PWMռ�ձ�;ʹ�÷ֶξ��Ի��ķ������@������λ�õ����PWMռ�ձȡ��ڻ���MSP430F5418��Ƭ�C��Ӳ��ϵ�y�ό��r���F�˅����������Ϳ��ƣ�ᘌ���ͬ�Ě���{���y�M���ˌ�ʹ��PWM�����p�ٵ�10���ԃȣ��{���r�gС��1s���o���{��
1������
�����y�T��λ���������{���y�ĺ��IJ�����ͨ�^���ܽo����̖���yλ������̖�����ú��m�Ŀ��Ʋ��Ԍ��F���ЙC���ľ��_��λ���y�T��λ���Ĺ����^����Ҫ�֞酢�����������]�h���ƃɲ��֣��]�h�����㷨���������������ĽY������ɿ����^�̣�ʹ�yλ�����A�ڵ��O�������ٵ��M��Ŀ��λ�á�
�����]�h��������ʹ�õĿ����㷨���y�T��λ���ĺ��ģ���ͬ�Ĺ�˾���ڲ�ͬ��͵��y�T��λ������������Ҫ�����x��ͬ�Ŀ����㷨���ڇ��⣬�����T�ӹ�˾���ʽSIPARTPS2ϵ�в��õ����岽�_�P�������������㷨;�ձ�ɽ�乫˾�������ʽSVP3000ϵ�в��õ��������е�PID�㷨��
�����ڇ��ȣ��ؑc���x�Ԅӻ��ɷ�����˾���ʽHVPϵ�в��õ����岽�_�P��;����W�������岽�_�Pģ�������㷨;������ӿƼ���WSEVP�Ͳ����ھ����R���˹����ܵķ���;�Ϸʹ��I��W���ؑc���x�Ԅӻ��ɷ�����˾ᘌ����y���岽�_�P�����ډ���_�Pʽ�y�T��λ�����ƕr�����ڈ��ЙC���ٶ��^�������F���{����ʎ����r������ˎ�����PWM���岽�_�P����
�������y�T��λ���Ŀ����У��x���������Ŀ��Ʋ����Ժ���Ҫᘌ������㷨�Լ��������y�T��������ą���������������ͨ�^ԓ�����������㷨�܉�ʴ_���������������܉�ӳ�y�T���Ե��Լ������㷨�еĿ��ƅ������Ķ����C�����㷨�Ŀ��ƾ��Ⱥ����õ��m���ԡ����ښ���{���y�Ĉ��ЙC���N��࣬���o���ӑB����һ�����^��ڿ����^���У������d�ɺ͚��ҵĚ≺����׃���ģ��䱻�����Ǖr׃���Ǿ��Լ����_���ģ����_�Ĕ��Wģ���y�Խ������@������˿��ƅ����IJ��_�������μ��Ľ�����o���Ŀ��ƅ����������ձ��m���ԣ����{���^�̷�������ˣ����y�T��λ���M�Ѕ������������]�h����֮ǰ����Ҫ�΄ա������������ă���ֱ��Ӱ푵�ϵ�y����K����Ч�������T�ӹ�˾ͨ�^��й©������С��λ�����Ĝyԇ���@�����^�õĿ���Ч��;����W���������^���в��÷ֶξ��Ի��ķ����M����С��λ�����Ĝyԇ���@�ú����Ŀ��ƅ���������ᘌ�������PWM���岽�_�P������������ą������������������y�T���������^���У��Ԅӱ��R������ٶȡ�����^�_��������λ�õ����ռ�ձȣ���Ч�ش_��������PWM�岽�_�P���Ŀ���Ч����
2��������PWM���岽�_�P�����㷨
�������y���岽�_�P����ȡ����Bang-Bang(���º��QB-B)���ƺ�����PWM���ГQ�ķ�����B-B������ָ���yλ���xĿ��λ���^�h�r�����M���(���Ś��)ȫ�_�����yλ�M��ȫ���{��;����PWM������ָ���yλ����Ŀ��λ�ã���һ�������Ȱ����O�������ں�ռ�ձȣ�ݔ��PWM����Ȼ����ͨ�^�Д�ԓ�ƽ�����Ǹ��ƽ���M���(���Ś��)���_;���ǵ��ƽ�t�M�б��֣��Դˁ��_���p�ٵ�Ŀ�ġ����ǣ�ԓ����ֻ����һ���̶��Ͽ����ٶȣ������ٶ��^��Ĉ��ЙC�����ԕ����F���{������ʎ��
�������˽�Q���y���岽�_�P���ڿ����^���д��ڵĆ��}������ˎ�����PWM���岽�_�P��������PWM���ƺ�����PWM�������ƣ�ֻ���ڸ��ƽ��r���M����Ś�Ġ�B�෴�������ԭ����D1��ʾ�����`���^��r���yλλ�ڿ��م^���˕r����B-B���ƣ����ٜpС�`��;���`���^С�����ٶ��^��r���yλλ�ڽ��م^���˕r���÷���PWM���ƣ�Ѹ�ٜpС�yλ�ٶ�;���`���^С�����ٶ�Ҳ�^С�r���yλλ���{�^���˕r��������PWM���ƣ������ƽ�Ŀ��λ��;ֻ�Ю��`���c�ٶȶ���С�r���yλ���M�����^�����ڿ����㷨���漰B-B���ƺ�PWM���Ƶ��ГQ��������Ҫ������ͬ�Ĉ��ЙC���x��ͬ���ГQ�c;������PWM���ГQ�Ǹ����yλ�ٶȁ��_������δ_��ԓ�ٶ�Ҳ���P�I�Ć��};����������PWM������ԓ�㷨�ĺ��ģ�������Ό��F�����ռ�ձȵľ��_���ң��Q������K�Ŀ���Ч�����@Щ�P�I��������Ҫ���������^���д_������ˣ����������������C�����㷨�ľ��ȣ��������������㷨���ձ��m���ԡ�
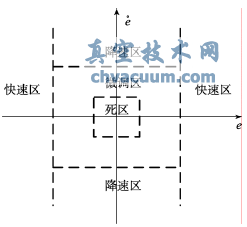
�D1 ������PWM���岽�_�P����ƽ��D
3�������������^��
����ᘌ���ӈ��ЙC���N��࣬���Բ�^��Ć��}������Ԍ����������㷨���܉��Ԅӱ��R��ӈ��ЙC�����г���͡����cλ�á�����\���ٶȡ�����^�_�������ӕr�Լ����ռ�ձȵȅ�������Ч��������ϵ�y���{�����@����߿����ٶȡ����ƾ����Լ��ձ��m���ԡ�
�D2 �����������^������
����3.1���_������
�����y�T��λ������y�Ȳ�����4������A��B��C��D������AD���ӿ����M�⣬��߉ֵ���_4�����ӵĠ�B��1001��BC���ӿ����Ś⣬߉ֵ���_��0110�����֠�B��0000��������y�T��λ�����г���ͷ֞����г̺ͷ��г̣��������г��y�T��λ�����M��r�yλ�pС���Ś�r�yλ�������г̄t�����෴���������Ҫ�Д��г���ͣ�Ҳ������ֵ�����yλ������Pϵ��������������һ����D3��ʾ��
����3.2���yԇ�_�h����
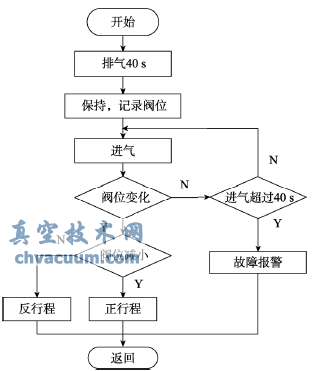
�D3 Step1�������������̈D
�����@һ������ҪĿ����ͨ�^�_�h����ȡ���ЙC���_�h���ԣ��Ķ��������y�T��λ�����������½��ļ��ӕr���{���r�g������\���ٶȡ�����ٶ�λ�õȅ����Լ��г̶��cλ�á���飬���ЙC�����M���^�̺��Ś��^���е����Բ���@����ˣ��M���^�̺��Ś��^�̵ą�����քe���������w�����飺���ȣ�������������1)�������õ����г���ͣ������y�T��λ����ȫ�_�ķ�ʽ�ĵ��\�е�픶ˣ��y�������^��б�������c��������ٶ�Vup������ٶ�λ��Lup�����M���_ʼ���yλ�_ʼ�����ĕr�g����鼃�ӕrτup���yλ�ĵ��c����c�r�g�����{���r�gTup�Լ�픶�λ��Ltop�͵�λ��Lbuttom��Ȼ�����yλ��ȫ�_��ʽ��픶�λ���\�е���λ�ã��y���½��^��б������c��������ٶ�Vdown������ٶ�λ��Ldown�����Ś�yλ�����r�g������ӕrτdown�Լ��yλ����c�����c�r�g�����{���r�gTdown�����ڻ������o���ɕr���������cλ��̎�Ǿ����e���أ��{���r�g�e�L����ˣ����x�{���r�gTup���yλ��10%FSRλ��������90%FSRλ�õĕr�g��Tdown���yλ��90%FSRλ���½���10%FSRλ�õĕr�g��
�������ڲ�ͬ�Ě�ӈ��ЙC�����ԵIJ�ͬ���������{���r�g�^��IJ����ˣ����_�h�yԇ�^���У���Ҫ�����^��������Ӌ����ЙC�����_�h���ԣ�������ɔ��������Ӌ��Y�����ʴ_�Ȇ��}����ˣ�������߅��������Ŀɿ��ԣ��������2�c̎����ʩ��1)������������2)�����������õ����{���r�g�����ÿ�׃�g���ĸ��c��ȡ���淽��������{���r�g�^�L���t�xȡ�^����g������攵�����Ķ����C���������l�������2)���ڈ��ЙC�����\���^�����ٶȲ�����ȫƽ���ģ�������Ӌ���ٶȕr��ͨ�^����һ�Εr�g�IJɘ�ֵ��Ȼ��Ӌ��5���ٶȣ�ͨ�^ȥ���ֵ����Сֵ����Ӌ��ƽ���ٶȵķ������������S�C�`��Ķ����C�ٶȵĜʴ_�ԡ�
����3.3���_������^�_��
�������ښ�ӈ��ЙC���\���^���У����ڙCе�T�ԣ��@������ڼȲ��M��Ҳ���Ś����r�£����ЙC���Ծ���һ�����ٶȣ��Ķ����a���^�_���������岽�_�P�������`����^��r������B-B���ƣ����`���^С�r����PWM���ƣ����B-B�����cPWM����֮�g�ГQ�c���x����K�Ŀ���Ч���кܴ�Ӱ푣�����ГQ�c�x���^̫�h���t�{���r�g��̫��;����ГQ�c�x���^̫�����t���a�����{�����Ը������ЙC�������еęCе�T�ԣ��x������^�_������ֽ��c��
�������y�T��λ�����_�h���Ԍ���֪���ڝM���̷����ȣ��yλ����\���ٶ�̎���^�_�������ˣ����x����^�_���飺�yλ�\�е�����ٶ�λ�ã����ƶ˿ڽo������߉�Ժ��yλ�^�m���еľ��x��
����������������3)�����̈D��D4��ʾ��������2)������������������ٶ�λ�ã�������ٶ�λ��̎���քe���������^�̵�����^�_��Sup���½��^������^����Sdown��������^�_����������^����B-B���ƺ�PWM���Ƶķֽ��c���Ķ����C�˿���Ч����
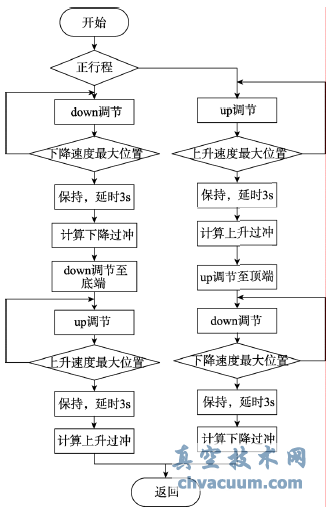
�D4 Step3����������ܛ�����̈D
����3.4���_�����PWMռ�ձ�
�������ښ�ӈ��ЙC���N��࣬�ҷǾ������ԇ��أ����ԣ��y�T��λ���ڲ�ͬ����Ŀ��λ������Ҫ��PWMռ�ձ��Dz�ͬ�ġ���ͬPWMռ�ձ����������yλ�����^���������½��^��������D5��ʾ���ɈD��֪��PWMռ�ձ�ԽС���yλ�\���ٶ�Խ�����{���r�gԽ�L��PWMռ�ձ�Խ���yλ�\���ٶ�Խ�죬�{���r�gԽ�̡���ˣ�ᘌ��Ǿ������Ա��^���صĚ�ӈ��ЙC������ͬĿ��λ�Ì�����ͬ��PWMռ�ձȡ����y���y�T��λ����ʹ���岽�_�P�����^���У�PWMռ�ձ�һ���Ǹ������o�����������ձ��m���ԣ����ڷǾ��ԇ��صĈ��ЙC����ͬһPWMռ�ձ���ijһĿ��λ�ÿ��ܕ����ռ�ձ�̫���³��{��������һλ�ÿ��ܕ����ռ�ձ�̫С�����{���r�g�^�L�����ԣ�������څ����������^���У��_�����PWMռ�ձȵķ������������г̷ֶΣ��ڲ�ͬ���г�λ�ã�ʹϵ�y�Ԅӱ��R������PWMռ�ձȡ�
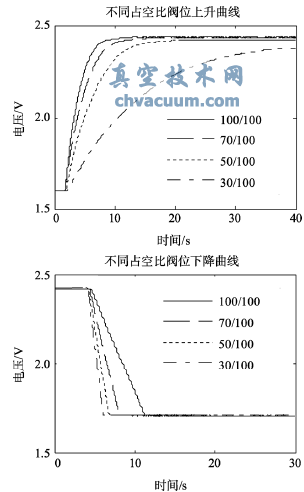
�D5 ��ͬPWMռ�ձ��yλ푑�����
�������x��Ѷ�λ�ٶ�����4)�քe����10%FSR��30%FSR��50%FSR��70%FSR��90%FSRλ�����ռ�ձ�D����ͨ�^�ֶξ��Ի����_��ÿ��Ŀ��λ�Ì��������ռ�ձȣ�����ֶξ��ԔM��ϵ��������EEPROM�С�
�����څ����������^���У�����Ҫ�Ŀ��ƅ���������\���ٶȡ�����^�_�������PWMռ�ձȣ����У�����\���ٶȵĴ�С�Q��������^�_���Ĵ�С������\���ٶ�Խ����ԓ�y�T����ؓ�dԽ�p�����ԽС�����PWMռ�ձ�ҲԽС����ˣ�����^�_�������PWMռ�ձȵ������Y��ֱ��Ӱ��˿���Ч����������\���ٶȄt�������y�T���������ԣ�������Ҫ�ą�����
����3.5����Ƭ�C���F
����ϵ�yӲ�����ؑc���x�Ԅӻ��ɷ�����˾���ƣ�MCU���õ���TI��˾��MSP430F5418��̖��Ƭ�C��ԓ��Ƭ�C�������г����ĵ����ԣ����ҹ�����ϵ�y����������ܛ������ģ�K���OӋ�������������������^�̷֞�4��ģ�K��ģ�Kһ���г���ʹ_��;ģ�K�����_�h���Դ_��;ģ�K��������^�_���_��;ģ�K�������ռ�ձȴ_��������������ģ�K���������������������������ó����腢�����������������̈D��D6��ʾ��
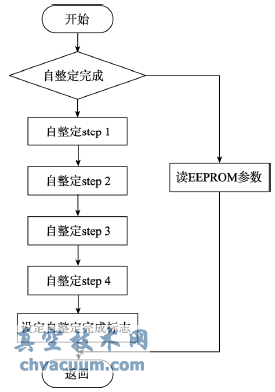
�D6 �������������̈D
4��������������
�������岽�_�P���У��yλ���ٶ���Ҫ��PWMռ�ձțQ��������yλ�ٶ�̫�t�����³��{��������ʎ;����yλ�ٶ�̫С���t������{���r�g�^�L�����y���岽�_�P����PWMռ�ձ��Ǹ�������O���ģ��������г̷�����ʹ�õ�����ͬ��PWMռ�ձȣ����������ͬһ���ЙC����ͬ�г�λ�ÿ���Ч�������@��࣬���Ҳ������ձ��m���ԡ����^�µ����������������������PWMռ�ձȣ��ǽ��^�ֶξ��Ի��õ��ģ���ͬ���г�λ�õó���ͬ��PWMռ�ձȣ���ӳ�ˈ��ЙC�����������ԣ��������г̷����ȵĿ���Ч�����@���ƣ����Ҿ����ձ��m���ԡ�
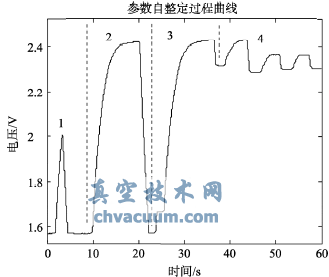
�������µ�������������Ӳ��ϵ�y�ό��r���F�Ժ����ؑc���x�Ԅӻ��ɷ�����˾����ͬ��͵Ě���{���y�M���������������������������õ��ą����M���˿��ƌ���������Ч�ԡ�����2�͎�ʯīؓ�d����{���y�������ؓ�d�^�p���������ٶ��^�죬�ڲ�ʹ���������ռ�ձȵķ����M�п��ƕr�������^�̽������F���{����ʎ�ĬF����ˣ���2��ֱ�г̚�ӈ��ЙC����ʯīؓ�d�r�Ŀ���Ч�����������^����������ǰ��Ŀ���Ч����
��������������֮ǰ�Ŀ���Ч����D7�͈D8��ʾ�������F�����O��B-B�����cPWM����֮�g�ķֽ��c�Լ�PWMռ�ձȵĴ�С���O�����^������0.4%FSR���o����̖��4mA�_ʼ���o���A�S��̖6%FSR��u���ӵ�13mA���ɈD7��֪���S���yλ�����������ڷǾ��Ե�ԭ������PWM������u���࣬�{���r�g��u׃�L���D8��ʾ��9~10mA�A�S׃���r������Ч���ֲ��Ŵ�D������PWM������6�����{���r�g��0.83s��
���������������Ժ�Ŀ���Ч����D9�͈D10��ʾ���Ʌ����������ó�����^�_��������ٶ��Լ����ռ�ձȵȅ������O�����^������0.4%FSR���o����̖��4mA�_ʼ���o���A�S��̖6%FSR��u���ӵ�12mA���ɈD9��֪���S���yλ����������ͬĿ��λ�ã��{���r�g��࣬����PWM�����]�����ӣ��c����������֮ǰ�Ŀ���Ч����������@�ĸ��ơ��D10��ʾ��9~10mA�A�S׃���r������Ч���ֲ��Ŵ�D������PWM������2�����{���r�g��0.69s�������������Ժ�PWM���Ƃ����p�٣��{���r�g�pС��
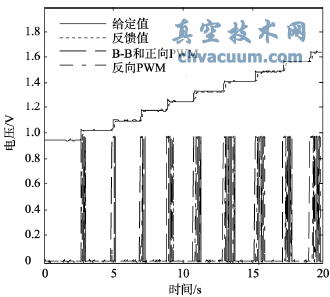
�D7 ����������ǰ����Ч���D
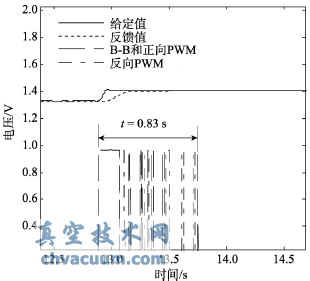
�D8 ����������ǰ����Ч���ֲ��Ŵ�D
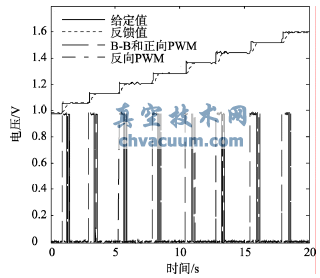
�D9 ������������������D
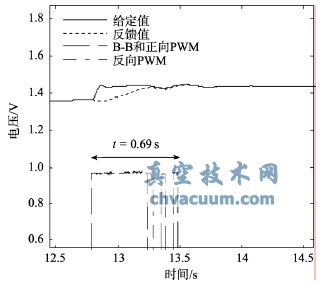
�D10 ���������������Ч���ֲ��Ŵ�D
5���YՓ
�����_����B-B���ƺ�PWM���Ƶķֽ��c�͈��ЙC������^�_�����Pϵ��ͨ�^����������ٶ�λ��̎���^�_������������^����B-B���ƺ�PWM���Ƶķֽ��c���Ķ����C�˿��ƕr�g���Ҳ��a�����{���څ����������^���У�������Ѷ�λ�ٶȌ��Ҳ�ͬλ�õ����PWMռ�ձȣ����F�����^��������λ��PWMռ�ձȵČ��rӋ�㣬�pС�����}�_�Ă������ӿ��y�T��λ���Ķ�λ�ٶȣ����ڲ�ͬ����y�T��λ���܉�������H��r���ʴ_�ش_�������PWMռ�ձȡ��ڻ���MSP430F5418��Ӳ��ϵ�y�ό��F���y�T��λ���ą������������]�h���ƣ�ᘌ���ͬ��͵Ě���{���y�M�Ќ��c���y�岽�_�P���Ŀ��ƽY����ȣ�Ч�������@����