ą┬ą═╗¶Ā¢╩ĮųŪ─▄ķyķTČ©╬╗Ų„įŁ└Ē┼cįOėŗ
ĪĪĪĪ─┐Ū░Ż¼ųŪ─▄ķyķTČ©╬╗Ų„Ą─╬╗ų├Ę┤üÖCśŗ(g©░u)Ż¼ČÓ▓╔ė├ÖCąĄĮY(ji©”)śŗ(g©░u)Ż¼┤µį┌─źōp┤¾ĪóŠ½Č╚Ą═Īóē█├³Č╠Ą╚╚▒³cĪŻ╗∙ė┌╗¶Ā¢é„ĖąŲ„╝╝ąg(sh©┤)║═ą┬ą═ē║ļŖķy┐žųŲ╝╝ąg(sh©┤)Ż¼čąųŲ┴╦ę╗┐Ņć°«a(ch©Żn)ą┬ą═╗¶Ā¢╩ĮųŪ─▄ķyķTČ©╬╗Ų„Ż¼īŹ¼F(xi©żn)┴╦¤oĮėė|Š½┤_£y┴┐ĪŻ═¼ĢrŻ¼įō«a(ch©Żn)ŲĘŠ▀ėą¤oÖCąĄ─źōpĪó£■║¾ąĪĪóĮY(ji©”)śŗ(g©░u)║åå╬┐╔┐┐Īó▀\ąąē█├³ķLĪóŠ½Č╚Ė▀Ą╚ųTČÓā×(y©Łu)³cĪŻįOėŗųąŻ¼čąųŲ┴╦ŠĆąį╬╗ęŲ╗¶Ā¢é„ĖąŲ„Ż¼ė▓╝■ļŖ┬Ęųąæ¬ė├┴╦│¼Ą═╣”║─╝╝ąg(sh©┤)Ż¼┐žųŲ╦ŃĘ©ųąæ¬ė├┴╦─Ż║²┐žųŲĄ╚ųŪ─▄┐žųŲ╝╝ąg(sh©┤)ĪŻ«a(ch©Żn)ŲĘČ©╬╗Š½Č╚Ą╚ąį─▄Ą├ĄĮ┴╦’@ų°╠ß╔²Ż¼ŲõųąŻ¼ŠĆąį╗¶Ā¢é„ĖąŲ„įOėŗ╝░ŲõĄ═╣”║─æ¬ė├╝╝ąg(sh©┤)Ż¼ī┘ė┌ć°ā╚(n©©i)╩ūäō(chu©żng)Ż¼«a(ch©Żn)ŲĘš¹¾w╦«ŲĮŠ▀ėąąąśI(y©©)ŅIŽ╚ā×(y©Łu)ä▌ĪŻ
ĪĪĪĪė╔ė┌ÜŌäėŽĄĮy(t©»ng)Š▀ėąĮY(ji©”)śŗ(g©░u)║åå╬Īóąįār▒╚Ė▀ĪóŠG╔½Łh(hu©ón)▒ŻĪó░▓╚½┐╔┐┐Īó┐╣Ė▀ŅlĖ╔ö_Īó▀^▌d─▄┴”ÅŖĄ╚ųTČÓā×(y©Łu)³cŻ¼ę“Č°į┌╣żśI(y©©)▀^│╠┐žųŲŅIė“Ż¼Ą├ĄĮ┴╦ÅVĘ║æ¬ė├ĪŻĄ½╩ŪŻ¼į┌é„Įy(t©»ng)Ą─ÜŌäėįOéõĄ─╬╗ęŲÖz£yųąŻ¼Ų®╚ńķy╬╗ūāäėŲ„ĪóÜŌäėČ©╬╗┐žųŲŲ„Ą╚Ż¼│Żė├Ė„ĘNÖCąĄé„äėÖCśŗ(g©░u)║═Įėė|╩ĮļŖ╬╗Ų„ū„×ķé„ĖąŲ„Ż¼╦∙ęį═∙═∙│÷¼F(xi©żn)─źōpĪóč§╗»Īó└Ž╗»ĪóÖCąĄ£■║¾Ą╚▓╗┴╝¼F(xi©żn)Ž¾Ż¼ć└ųžė░Ēæ£y┴┐║═┐žųŲŠ½Č╚ĪŻČ°╗¶Ā¢é„ĖąŲ„Ż¼ū„×ķę╗ĘN¤oĮėė|ĪóŠĆąįĪóĖ▀Š½Č╚é„ĖąŲ„Ż¼ät┐╔ęįśO┤¾ĄžÅøča┴╦é„Įy(t©»ng)╬╗ęŲÖz£yé„ĖąŲ„Ą─▓╗ūŃĪŻĮ³─ĻüĒŻ¼╝»│╔ėą╗¶Ā¢į¬╝■║═╬ó╠Ä└ĒąŠŲ¼Ą─Ą═╣”║─╗¶Ā¢é„ĖąąŠŲ¼Ż¼ęčĮø(j©®ng)ķ_╩╝æ¬ė├ė┌╣żśI(y©©)ūįäė╗»╝╝ąg(sh©┤)ĪóÖz£y╝╝ąg(sh©┤)╝░ą┼Žó╠Ä└ĒĄ╚ĘĮ├µĪŻ╗∙ė┌ŠĆąį╗¶Ā¢é„ĖąŲ„╝╝ąg(sh©┤)Ż¼▒▒┐ž╝»łF╦∙ī┘▒▒Š®Š®āx╝»łF╣½╦ŠŻ¼čąųŲ▓ó═Ų│÷┴╦ę╗┐Ņ╚½ą┬Ą─╗¶Ā¢╩ĮųŪ─▄ÜŌäėČ©╬╗┐žųŲŲ„ĪŻ┼cé„Įy(t©»ng)ĘŪ╗¶Ā¢╩ĮųŪ─▄ķyķTČ©╬╗Ų„ŽÓ▒╚Ż¼Š▀ėą¤oĮėė|Īó¤oÖCąĄ─źōpĪóķLē█├³ĪóĖ▀Š½Č╚Ą╚ę╗ŽĄ┴ąā×(y©Łu)³cĪŻ
1Īó╗¶Ā¢ą¦æ¬┼cŠĆąį╗¶Ā¢é„ĖąŲ„įOėŗ
ĪĪĪĪ1.1Īó╗¶Ā¢ą¦æ¬┼c╗¶Ā¢é„ĖąŲ„╗∙▒ŠįŁ└Ē
ĪĪĪĪų├ė┌┤┼ł÷ųąĄ─▌d┴„¾w(ę╗░ŃČÓė├░ļī¦¾w▓─┴Ž)Ż¼Ųõ╚¶┼c┤┼ł÷┤╣ų▒Ę┼ų├Ż¼«ö═©ęįļŖ┴„ĢrŻ¼į┌┼c┤┼ł÷║═ļŖ┴„┤╣ų▒Ą─ĘĮŽ“╔ŽŻ¼ė╔ė┌ļŖ║╔ę“╩▄ĄĮ┬Õü÷┤┼┴”Ą─ū„ė├Č°░l(f©Ī)╔·Ų½▐D(zhu©Żn)Ż¼ą╬│╔ļŖ║╔Š█ĘeŻ¼«a(ch©Żn)╔·╗¶Ā¢ļŖä▌Ż¼▀@▒Ń╩Ū╗¶Ā¢ą¦æ¬ĪŻ╗¶Ā¢é„ĖąŲ„▒Ń╩Ū╗∙ė┌╗¶Ā¢ą¦æ¬Ą─ę╗ĘNą┬ą═┤┼═©ÅŖČ╚é„ĖąŲ„Ż¼«öė├ė┌£y┴┐┤┼ł÷ųą╬’¾w╬╗ęŲĢrŻ¼ėųĘQ╗¶Ā¢╬╗ęŲé„ĖąŲ„Ż¼ę╗░ŃĘų×ķĮŪ╬╗ęŲ║═ŠĆąį╬╗ęŲ╗¶Ā¢é„ĖąŲ„Ż¼═©▀^Öz£yė└┤┼┤┼ł÷ųąŻ¼▓╗═¼╬╗ų├╠ÄĄ─┤┼═©┴┐Ą─ūā╗»Ż¼üĒ╠Į£y╬’¾wĄ─╬╗ęŲ┴┐ĪŻ
ĪĪĪĪ╗¶Ā¢ŠĆąį╬╗ęŲé„ĖąŲ„£y┴┐įŁ└Ē╚ńŽ┬Ż║ā╔ēKNS┤┼śOĄ╣ų├ĪóŪęŽÓī”ŲĮąąĘ┼ų├Ą─Ślą╬┤┼õōŻ¼║═ę╗éĆ╗¶Ā¢╠ĮŅ^╣▓═¼ĮM│╔┴╦ę╗éĆ╬╗ęŲ£y┴┐ŽĄĮy(t©»ng)Ż¼Ųõ┤┼ł÷ł÷ÅŖĘ┬šµŪ·ŠĆ╚ńłD1╦∙╩ŠĪŻŲõųąŻ¼╩Ė┴┐╝²Ņ^▒Ē╩Š┤┼┴”ŠĆĄ─┤¾ąĪ╝░ĘĮŽ“;┤┼ł÷ųąĄ─łAą╬╬’¾wŻ¼▒Ē╩Š╗¶Ā¢é„ĖąŲ„╠ĮŅ^Ż¼┤┼┴”ŠĆ┤╣ų▒┤®įĮ╗¶Ā¢╠ĮŅ^ĪŻ«ö╠ĮŅ^╔ŽļŖ║¾Ż¼ė╔ė┌╗¶Ā¢ą¦æ¬Ą─┤µį┌Ż¼▒ŃĢ■▌ö│÷╗¶Ā¢ļŖē║ĪŻ╗¶Ā¢ļŖē║┼cļŖ┴„Īó┤┼ł÷ÅŖČ╚║═╗¶Ā¢ŽĄöĄ(sh©┤)Ą─ĻPŽĄ╚ńŽ┬Ż║
łD1 ┤┼ł÷ł÷ÅŖĘ┬šµŪ·ŠĆłD
ĪĪĪĪŲõųąŻ║Rh×ķ╗¶Ā¢ŽĄöĄ(sh©┤)Ż╗IS×ķļŖ┴„ÅŖČ╚Ż╗B×ķ┤┼ł÷ł÷ÅŖŻ╗d×ķ┤┼õōķgŠÓĪŻ«öRhĪóIS║═d╚²éĆģóöĄ(sh©┤)╣╠Č©╗“▒Ż│ų║ŃČ©ĢrŻ¼╗¶Ā¢ļŖē║▒Ń┼c┤┼ł÷ÅŖČ╚Ą─┤¾ąĪ│╔š²▒╚ĻPŽĄŻ¼▀@▒Ń╩ŪŠĆąį╗¶Ā¢é„ĖąŲ„Ą─£y┴┐įŁ└ĒĪŻ
ĪĪĪĪ1.2ĪóŠĆąį╗¶Ā¢é„ĖąŲ„įOėŗ┼cīŹ¼F(xi©żn)
ĪĪĪĪ1.2.1ĪóĮY(ji©”)śŗ(g©░u)įOėŗ
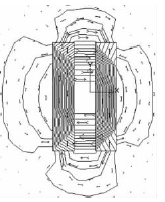
ĪĪĪĪłD2╩ŪŠĆąį╬╗ęŲ╗¶Ā¢é„ĖąŲ„Ą─ĮY(ji©”)śŗ(g©░u)łDĪŻ┤┼õō▓─┴ŽĄ─▀xō±┼cĮY(ji©”)śŗ(g©░u)įOėŗŻ¼╩Ūįō▓┐ĘųĄ─ųž³cā╚(n©©i)╚▌ĪŻŲõųąŻ¼┤┼õō▀x▓─ę¬Ū¾Ż║ó┘┤┼ę╗ų┬ąį║├Ż¼┤┼ąįŠ∙ä“Ż╗ó┌ĮY(ji©”)Š¦¾wĮY(ji©”)śŗ(g©░u)ų┬├▄Ż¼ÅŖČ╚Ė▀Ż¼┐╣Ė»╬gąį║▄ÅŖŻ╗ó█┤┼õōĄ─┤┼ąį╚▌ęū┐žųŲŻ╗ó▄£žČ╚╠žąį┴╝║├ĪŻŠC║Ž┐╝æ]Ż¼õXµćŌÆ┤┼õōĘ¹║Žę¬Ū¾ĪŻ
łD2 ŠĆąį╬╗ęŲ╗¶Ā¢é„ĖąŲ„ĮY(ji©”)śŗ(g©░u)łD
ĪĪĪĪ═¼ĢrŻ¼ī¦┤┼õōŲ¼Ż¼ę▓╩Ūé„ĖąŲ„┤┼┬ĘĄ─ųžę¬Łh(hu©ón)╣Ø(ji©”)Ż¼ī¦┤┼▓─┴ŽĄ─┤┼ūĶ▒žĒÜꬹĪŻ¼▀xė├Š▀ėą╠ž╩ŌōĮļsĄ─ĶFµć║ŽĮĪŻ┴Ē═ŌŻ¼┤┼õō╬’└Ē│▀┤ń║═┤┼¾wĘŌčb╣ż╦ćĄ╚Ż¼ę▓╩ŪŠĆąį╗¶Ā¢é„ĖąŲ„įOėŗųąĄ─ųžę¬ę“╦žĪŻįOėŗųąŻ¼śŗ(g©░u)Į©┴╦ĘŌķ]ąį┤┼¾wĮY(ji©”)śŗ(g©░u)Ż¼▓óė├╠ž╩Ō▓─┴Žī”┤┼¾w═Ō▓┐╝░╠ž╩Ō▓┐╬╗▀Mąą┴╦┤┼Ų┴▒╬ĘŌčbĪŻį┌▀MąąČ©╬╗Ų„įOėŗĢrŻ¼īó╗¶Ā¢é„ĖąŲ„Ą─╠ĮŅ^┼cČ©╬╗Ų„╣╠Č©į┌ę╗ŲŻ¼▓ó▒Ż│ųņoų╣▓╗äė;Įø(j©®ng)▀^╠ž╩Ō╣ż╦ć╝ė╣ż╠Ä└Ē║¾Ą─ė└Š├┤┼õō┼cÜŌäėķyĄ─ķyŚUŻ¼ė├╠ž╩Ō╣żčb║═┬▌╦©╣╠Č©į┌ę╗ŲŻ¼▓óļSų°ķyŚUĄ─▀\äėČ°═¼▓ĮęŲäėĪŻ┤┼õōĮY(ji©”)śŗ(g©░u)┼cķyŚUĄ─▀BĮėę¬└╬╣╠Ż¼▓ó▒M┴┐┘NĮ³ķyŚU▓┐╬╗Ż¼Ę└ų╣ÜŌäėł╠(zh©¬)ąąÖCśŗ(g©░u)į┌Ė▀╦┘š{(di©żo)╣Ø(ji©”)Ģrę²░l(f©Ī)╗¶Ā¢é„ĖąŲ„░l(f©Ī)╔·ŅØš±Ż¼ė░ĒæČ©╬╗╣”─▄ĪŻīŹ█`ūC├„Ż¼įōįOėŗĮY(ji©”)śŗ(g©░u)▓╗āHŠ▀ėą┴╝║├Ą─┐╣ļŖ┤┼Ė╔ö_Ą──▄┴”Ż¼Č°ŪęŠ▀ėą║▄Ė▀Ą─£y┴┐Š½Č╚ĪŻ
ĪĪĪĪ1.2.2ĪóĢrą“┐žųŲ┼cĄ═╣”║─įOėŗ
ĪĪĪĪ▒ŠįOėŗųą▓╔ė├┴╦ę╗┐ŅĄ═╣”║─ŠĆąį╗¶Ā¢į¬╝■ąŠŲ¼Ż¼Ųõų„ę¬╠žąį╚ńŽ┬Ż║╦³Ą─╣żū„ļŖē║×ķ2.4VĪ½3.5VŻ¼Ąõą═╣żū„ļŖ┴„║═╣”║─Ęųäe×ķ3.2mA║═10mW;į┌ĘŪ╣żū„ĀŅæB(t©żi)Ž┬╣”║─ļŖ┴„ąĪė┌25μAĪŻ┤┼ł÷Ą─┤┼═©┴┐×ķ┴ŃĢrŻ¼é„ĖąŲ„▌ö│÷ļŖē║╩Ūģó┐╝ļŖē║Ą─ę╗░ļŻ¼ūŅ┤¾’¢║═┤┼═©╦∙ī”æ¬Ą─ūŅ┤¾▌ö│÷ļŖē║×ķļŖį┤ļŖē║;į┌ĘŪ’¢║═ĀŅæB(t©żi)Ž┬Ż¼┤┼ł÷ųąĄ─┤┼═©┴┐├┐ūā╗»10-4TŻ¼é„ĖąŲ„▌ö│÷ļŖē║ūā╗»▓╗ąĪė┌2mVŻ¼Ūęā╔š▀│╔ŠĆąįĻPŽĄĪŻįōąŠŲ¼ėąę╗éĆųžę¬Ą─┐žųŲČ╦Ż¼═©▀^Ģrą“š{(di©żo)╣Ø(ji©”)┼c▄ø╝■┐žųŲŻ¼┐╔ęį╩╣╗¶Ā¢į¬╝■▀M╚ļ▓╗═¼╣żū„ĀŅæB(t©żi)Ż¼śO┤¾ĄžĮĄĄ═į¬╝■ŲĮŠ∙╣żū„ļŖ┴„Ż¼Å─Č°ØMūŃŽĄĮy(t©»ng)Ą═╣”║─ąĶę¬ĪŻÖz£y▒Ē├„Ż¼▓╔╚ĪŠC║Ž┤ļ╩®║¾Ż¼╗¶Ā¢ąŠŲ¼ŲĮŠ∙╣”║─ļŖ┴„▓╗│¼▀^100μAĪŻ
2Īó╗¶Ā¢╩ĮųŪ─▄ķyķTČ©╬╗Ų„įŁ└Ē┼cįOėŗ
ĪĪĪĪ2.1ĪóŽĄĮy(t©»ng)ĮY(ji©”)śŗ(g©░u)įOėŗ
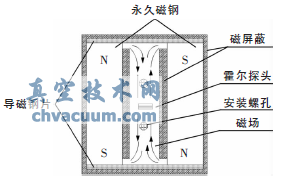
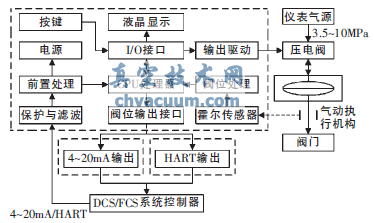
ĪĪĪĪ╗¶Ā¢╩ĮųŪ─▄ķyķTČ©╬╗Ų„ŽĄĮy(t©»ng)ĮY(ji©”)śŗ(g©░u)Ż¼╚ńłD3╦∙╩ŠŻ¼╣▓ė╔░╦éĆ▓┐ĘųĮM│╔Ż║ó┘Ū░Č╦ą┼╠¢╠Ä└ĒŻ╗ó┌ļŖį┤(░³└©I/VūāōQĪóļŖē║ūāōQ║═╔²ē║ļŖ┬Ę)Ż╗ó█▌ö╚ļ-▌ö│÷-╚╦ÖC▓┐ĘųŻ╗ó▄╬╗ų├Ę┤ü▌ö│÷(░³└©4Ī½20mA/HARTĮė┐┌ĪóīŻė├═©ą┼─ŻēK)Ż╗ó▌▌ö│÷“ī(q©▒)äėļŖ┬Ę┼c╝»│╔╩Įē║ļŖķyŻ╗ó▐╗¶Ā¢é„ĖąŲ„Ż╗ó▀╬╗ų├Öz£yĘ┼┤¾▓┐ĘųŻ╗óÓCPUūŅąĪæ¬ė├ŽĄĮy(t©»ng)Ą╚ĪŻŲõųąŻ¼╗¶Ā¢é„ĖąŲ„ĮY(ji©”)śŗ(g©░u)įOėŗ╩ŪŽĄĮy(t©»ng)ĮY(ji©”)śŗ(g©░u)įOėŗĄ─ųž³c┼c║╦ą─ĪŻ
łD3 ╗¶Ā¢╩ĮųŪ─▄ķyķTČ©╬╗Ų„ŽĄĮy(t©»ng)ĮY(ji©”)śŗ(g©░u)łD
ĪĪĪĪ2.2Īóė▓╝■ļŖ┬ĘįOėŗ
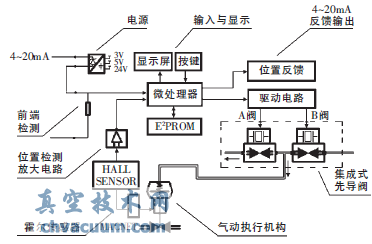
ĪĪĪĪłD4╩Ū╗¶Ā¢╩ĮųŪ─▄ķyķTČ©╬╗Ų„ė▓╝■įŁ└Ē┐“łDŻ¼╔Ž├µĄ─╠ōŠĆ┐“łDā╚(n©©i)╩ŪČ©╬╗Ų„ų„┐žļŖ┬Ę░Õ▓┐ĘųĪŻŽ┬├µā╔éĆąĪą═╠ōŠĆ┐“łD╩ŪŠ▀ėąś╦£╩Įė┐┌Ą─▓ÕĮė╝■ļŖ┬Ę░ÕĪŻĖ„▓┐Ęųų„ę¬ĮM│╔╝░Ųõ╣żū„įŁ└Ē╚ńŽ┬Ż║
ĪĪĪĪó┘üĒūį╔Ž╝ē┐žųŲŽĄĮy(t©»ng)Ą─ļŖ┴„ą┼╠¢Ż¼╩ūŽ╚Įø(j©®ng)▀^▒Żūo┼c×V▓©ļŖ┬ĘĪŻįō▓┐Ęųų„ę¬ė╔Ą══©×V▓©Ų„ĪóTVS╣▄Īóķ_ĻP╣▄ĪóĘĆ(w©¦n)ē║╣▄Ą╚į¬Ų„╝■ĮM│╔Ż¼═Ļ│╔╦▓æB(t©żi)├}ø_ļŖ┴„ęųųŲĪóĘĆ(w©¦n)ē║ĪóČ■┤╬▒ŻūoĪóI/V▐D(zhu©Żn)ōQĄ╚ųžę¬╣”─▄;ó┌Ū░Č╦ą┼╠¢╠Ä└Ēå╬į¬Ż¼═Ļ│╔Öz┴„┼cą┼╠¢Ę┼┤¾╣”─▄Ż¼▓╔ė├│¼Ą═£žŲ»Ą─┐ĄŃ~Öz┴„Ų„Ż¼ĮY(ji©”)║Ž╣▓─ŻęųųŲ╝░čaāöĘ┼┤¾ļŖ┬Ę║═ųŪ─▄×V▓©▄ø╝■Ż¼═Ļ│╔┴╦Ū░Č╦ą┼╠¢Ą─īŹĢr▓╔╝»┼cŠC║Ž×V▓©╠Ä└Ē[4];ó█ķy╬╗Ę┤ü▓┐ĘųŻ¼ų„ę¬ėą╗¶Ā¢é„ĖąŲ„╝░ŲõĘ┼┤¾ļŖ┬ĘĮM│╔Ż¼ŲõųąŻ¼╗¶Ā¢é„ĖąŲ„ėųĘų×ķė└Š├┤┼õōśŗ(g©░u)╝■║═Öz£y╠ĮŅ^ā╔▓┐ĘųŻ¼┤·╠µ┴╦é„Įy(t©»ng)Ą─▀BŚUĪó²X▌åĮM╝■║═ą²▐D(zhu©Żn)╩ĮļŖ╬╗Ų„Ż¼īŹ¼F(xi©żn)┴╦Č©╬╗Ų„ķy╬╗¤oĮėė|╩ĮīŹĢr£y┴┐;ó▄╬╗ų├Ę┤ü▌ö│÷å╬į¬Ż¼ōĒėąīŹė├ą┬ą═╝╝ąg(sh©┤)īŻ└¹Ż¼į┌ų„┐žļŖ┬Ę░Õ┴¶ėąś╦£╩▓ÕĮė┐┌Ż¼▓óīó(4Ī½20)mA║═HART▌ö│÷ļŖ┬Ęū÷│╔Įy(t©»ng)ę╗│▀┤ńĄ─▓ÕĮė╝■ļŖ┬Ę░ÕŻ¼Ė∙ō■(j©┤)ė├æ¶▓╗═¼ąĶŪ¾Ż¼ņ`╗Ņ┼õų├;ó▌I/P(ļŖ/ÜŌ)▐D(zhu©Żn)ōQå╬į¬Ż¼ų„ę¬═Ļ│╔ļŖ-ÜŌ▌ö│÷“ī(q©▒)äėą┼╠¢Ą─▐D(zhu©Żn)ōQŻ¼▓╔ė├┴╦╩└ĮńūŅą┬Ą─╝»│╔╩Įē║ļŖķyŻ¼īóā╔ų╗ķ_ĻPķy┼c▓┐ĘųÜŌäė╗ž┬Ę╝»│╔ė┌ę╗¾wŻ¼ĮY(ji©”)║ŽPWM┐žųŲ╝╝ąg(sh©┤)Ż¼╠ßĖ▀┴╦┐žųŲąį─▄;ó▐ļŖį┤å╬į¬╩Ūų„┐žļŖ┬Ę░ÕĄ─║╦ą─ļŖ┬Ęų«ę╗Ż¼ė├ęį«a(ch©Żn)╔·3VĪó5VĪó24VĄ╚öĄ(sh©┤)ĮMļŖē║Ż¼æ¬ė├╗∙ė┌Ė▀ą¦ļŖ║╔▒├Ą─DC-DC╔²ē║╝╝ąg(sh©┤)║═Ę∙Ņl╗ņ║Žš{(di©żo)ųŲ╝╝ąg(sh©┤)Ż¼ėąą¦ĮĄĄ═┴╦ļŖį┤ļŖ┬Ę▒Š╔ĒĄ─ļŖ─▄Ž¹║─ĪŻ
łD4 ╗¶Ā¢╩ĮųŪ─▄ķyķTČ©╬╗Ų„ė▓╝■ļŖ┬ĘįŁ└ĒłD
ĪĪĪĪ┴Ē═ŌŻ¼į÷╝ė┴╦░┤µIĪóLCD’@╩ŠĪóŲ¼═ŌE2ROMĄ╚ĖĮī┘å╬į¬ļŖ┬ĘŻ¼į÷ÅŖ┴╦╚╦ąį╗»įOėŗĪŻ
ĪĪĪĪ2.3ĪóŽĄĮy(t©»ng)▄ø╝■įOėŗ
ĪĪĪĪ2.3.1Īóų„│╠ą“
ĪĪĪĪ│õĘų└¹ė├MSP430F4XXė▓╝■┘Yį┤Ż¼ų„│╠ą“įOėŗ▓╔ė├┴╦│¼Ą═╣”║─Ż¼╝┤“ą▌├▀+ųąöÓ”╣żū„─Ż╩ĮŻ¼╚ńłD5ĪółD6╦∙╩ŠĪŻ│§╩╝╗»═Ļ│╔║¾Ż¼ų„│╠ą“▒Ń▀M╚ļ│¼Ą═╣”║─ą▌├▀ĀŅæB(t©żi)——LPM3ĪŻŲ┌ķgŻ¼CPUoff╬╗ų├╬╗Ż¼CPU═Żų╣╗ŅäėŻ¼═Ōć·─ŻēK║═ACLKą┼╠¢└^└m(x©┤)╣żū„Ż¼MCLK╝░ŲõµiŽÓŁh(hu©ón)═Żų╣╣żū„Ż¼DCOĄ─DC░l(f©Ī)╔·Ų„ĻPķ]ĪŻ«öėąųąöÓ╚╬äšĢrŻ¼Ų®╚ńų▄Ų┌▓╔śėĪóµI▒PĪó═©ą┼Ą╚Ż¼ŽĄĮy(t©»ng)▒╗åŠąč▀M╚ļ╣żū„ĀŅæB(t©żi)Ż¼═Ļ│╔ųąöÓ╚╬äš║¾Ż¼ėųūįäė▀M╚ļLPM3ą▌├▀ĀŅæB(t©żi)ĪŻįōųąöÓ╣żū„─Ż╩ĮŻ¼┐╔ęį┤¾┤¾ĮĄĄ═ŽĄĮy(t©»ng)╣”║─Ż¼Įy(t©»ng)ėŗ▒Ē├„Ż¼įō─Ż╩ĮĮĄĄ═╣”║─10%ęį╔ŽĪŻ
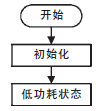
łD5 ų„│╠ą“┴„│╠łD
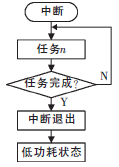
łD6 ųąöÓ╚╬äš┴„│╠łD
ĪĪĪĪ2.3.2Īó╗∙ė┌PWM─Ż╩ĮĄ─ųŪ─▄┐žųŲ╦ŃĘ©
ĪĪĪĪ(1)PWM┐žųŲ
ĪĪĪĪPWM┐žųŲį┌ĘŪŠĆąįŽĄĮy(t©»ng)┐žųŲųąŠ▀ėą¬Ü╠žā×(y©Łu)ä▌Ż║ó┘┐╦Ę■ĘŪŠĆąįę“╦žĄ─ė░ĒæŻ║PWMš{(di©żo)ųŲĘĮ╩ĮŻ¼┐╔ęįīóĘ∙ųĄ▀B└m(x©┤)ūā╗»Ą─ą┼╠¢▐D(zhu©Żn)ūā?y©Łu)ķĄ╚Ę∙ųĄĪóš╝┐š▒╚ūā╗»Ą─Ģrė“ą┼╠¢Ż¼ę“┤╦┐╔ęį║÷┬įą┼╠¢é„▌öĘŪņ`├¶ģ^(q©▒)Ą─ė░ĒæŻ¼į┌╦┼Ę■┐žųŲųąŻ¼ėąą¦ĮŌøQĘŪŠĆąįŽĄĮy(t©»ng)┤µį┌Ą─å¢Ņ}Ż¼Ų®╚ń▓╗ņ`├¶ģ^(q©▒)ĪóĄ═╦┘┼└ąąĄ╚ĪŻó┌ĮĄĄ═╣”║─Ż║į┌PWM┐žųŲ─Ż╩ĮĢrŻ¼“ī(q©▒)äėŠ¦¾w╣▄ę╗░Ń╣żū„į┌ķ_ĻPĀŅæB(t©żi)Ž┬Ż¼«öŠ¦¾w╣▄Įžų╣ĢrŻ¼ļm╚╗ļŖē║▌^┤¾Ż¼Ą½╩ŪļŖ┴„ĮėĮ³ė┌┴Ń;«öŠ¦¾w╣▄’¢║═ī¦═©ĢrŻ¼ļm╚╗ļŖ┴„▌^┤¾Ż¼Ą½╩Ū’¢║═ī¦═©ļŖē║║▄Ą═Ż¼╦∙ęį╣”║─ę└╚╗▌^Ą═ĪŻę“┤╦Ż¼į┌ļŖ┴„ą═“ī(q©▒)äėŽĄĮy(t©»ng)ųąŻ¼┼cŲõ╦¹┐žųŲĘĮ╩ĮŽÓ▒╚Ż¼PWM┐žųŲĘĮ╩Į┐╔ęįėąą¦ĮĄĄ═ŽĄĮy(t©»ng)“ī(q©▒)äė╣”║─ĪŻó█į÷╝ėŽĄĮy(t©»ng)Ēææ¬╦┘Č╚ĪŻ
ĪĪĪĪ(2)─Ż║²+ĘeĘų┐žųŲ╦ŃĘ©
ĪĪĪĪĮø(j©®ng)Ąõ─Ż║²┐žųŲīŹ┘|(zh©¼)╩ŪPD┐žųŲŻ¼ļm╚╗į┌ĘŪŠĆąį┐žųŲųąŠ▀ėą¬Ü╠žā×(y©Łu)ä▌Ż¼Ą½╩Ūę╗░Ń┤µį┌Ų½▓ŅĪŻ×ķ┴╦╠ßĖ▀Č©╬╗Š½Č╚Ż¼ī”é„Įy(t©»ng)─Ż║²┐žųŲ▀Mąą┴╦Ė─▀MŻ¼▓╔ė├┴╦─Ż║²+ĘeĘų┐žųŲ╦ŃĘ©Ą╚Ż¼Ųõ▄ø╝■┴„│╠╚ńłD7╦∙╩ŠĪŻ
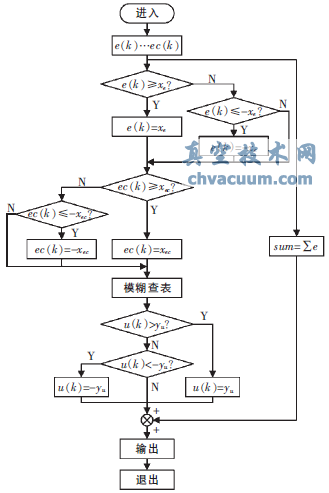
łD7 ę╗ĘNĖ─▀MĄ──Ż║²┐žųŲ┴„│╠łD
3ĪóĮY(ji©”)šZ
ĪĪĪĪ─┐Ū░Ż¼ęčĮø(j©®ng)═Ļ│╔╗¶Ā¢╩ĮČ©╬╗Ų„śėÖCĪŻ┼cé„Įy(t©»ng)▀BŚU╩ĮķyķTČ©╬╗Ų„ŽÓ▒╚▌^Ż¼╗¶Ā¢╩ĮųŪ─▄ķyķTČ©╬╗Ų„Š▀ėąįSČÓ’@ų°Ą─ā×(y©Łu)³cĪŻį┌╗¶Ā¢é„ĖąŲ„Ą═╣”║─æ¬ė├ĘĮ├µŻ¼ōĒėą¬Ü╠žĄ─║╦ą─╝╝ąg(sh©┤)Ż¼Ųõ¤oĮėė|Ė▀Š½Č╚£y┴┐╝╝ąg(sh©┤)Ż¼į┌ųŪ─▄ķyķTČ©╬╗Ų„║═ŠĆąį╬╗ęŲ£y┴┐ųąŻ¼Š∙Š▀ėąć°ā╚(n©©i)ŅIŽ╚╦«ŲĮĪŻ╗¶Ā¢╩ĮųŪ─▄ķyķTČ©╬╗Ų„Ą─čąųŲŻ¼ķ_äō(chu©żng)┴╦¤oĮėė|Īó¤o─źōpĪóĖ▀Š½Č╚ĪóĖ▀ē█├³ųŪ─▄ķyķTČ©╬╗Ų„Ą─Źõą┬Ų¬š┬Ż¼═¼ĢrŻ¼ę▓×ķķy╬╗£y┴┐╠ß╣®┴╦ą┬Ą─ĘĮ Ę©Ż¼×ķ═Ųäė║═░l(f©Ī)š╣ć°«a(ch©Żn)ą┬ą═ųŪ─▄ķyķTČ©╬╗Ų„«a(ch©Żn)śI(y©©)ū÷│÷┴╦ĘeśO┼¼┴”ĪŻ