��ˮ�l���yROV���әC�����OӋ�о�
����ˮ���l���yROV�ӿڶ����Ƅ�ʽ������әC���Y���^���s���������졣��ˣ��OӋ��һ�N�����l���yROV���әC����ԓ�C����Q����ˮ���ӗl�����y���ܷ⡢�y�Գ��d�^���_�������OӋ�y�}�����������ROV���әC���OӋ���������Y���OӋ���������P�I�����ݗU�M���OӋӋ�㡣ͨ�^��ROV���әC�����w���\�ӌW�̈́����W����Y���������Mһ����C���OӋ�ĺ����ԺͿ����ԡ�ROV���әC�����OӋ�ͷ�����������ˮ�y�T���OӋ���әC���Ƶ춨����Փ���A��
����
�����S������ʯ����Ȼ��I�İlչ����ˮ�^����͚��YԴ����ر���̽�Ͱl�F��ˮ�����aϵ�y�ѽ��ɞ�һ�N��Ҫ����ˮ�_�lģʽ���c��ͬ�r��ˮ�¿���ϵ�yռ����Ҫ�ĵ�λ����������ˮ�y�T�đ��ú���������څ���ӡ�������ˮ�l���y�L�ڹ����ں�ˮ�h��������ˮ�h���в����ˆT�o���M�ЬF�����������]ˮ���l���y���ЙC���Ĺ��ϰ�ȫ�ԣ��������ˮ�l���y����ҪROV�o��Һ�����ЙC�������y�T���_�����P�]����ˣ��б�Ҫ����ЙC�����˜ʵ�ROV�ӿڡ�
����ˮ���l���yҺ�����ЙC���cꑵ��l���y��Һ�����ЙC����ȣ��Y��ԭ��������ͬ���������h����ͬ����ˑ���Ҫ���]��ˮ���g����ˮ���������ЙC����Ӱ푡���ȁ��v���҇���ˮ�����aϵ�y���о����^����Ŀǰ�ڇ����о��Ԍٿհס�ͨ�^������aƷ�ķ����о����Y���������y�TROV�ӿڶ����Ƅ�ʽ��ROV���әC���ĽY���^���s���������졣ᘌ���������ˮ1500m���͚≺����34.5MPa��Φ152.4mm(6in)�ܵ����l���y���P���OӋ��һ�N�����l���yROV���әC�����_���˂��әC���Ŀ��w������ͬ�r���P�I�����ݗU�M�����OӋ�ͷ������Mһ����C���OӋ�����Ŀ����ԡ�
1���l���yROV���әC������
��������ˮ���l���yROV���әC�����аl�Լ����켼�g�ѽ����^���죬�S��֪���ĺ����O�����칫˾���Ќ����Լ�֪�R�a���ϵ�ЮaƷ���������S���ijɹ����ð�������FMC��˾��M3000ϵ��(Ҋ�D1)��Cameron��˾��Ring-Oϵ���Լ�Mag-num��˾�����P�aƷ�ȡ�
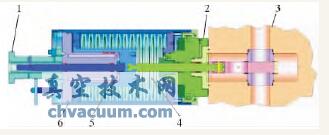
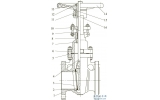
1—ROV�ӿںͿ�ҕָʾ�C��;2—�y�w;3—�y�w;4—�a����;5—������;6—���әC�����ɡ�
�D1 FMC��˾M3000�l���y���ЙC��
����Ŀǰ�l���y����ԭ��������ͬ�������l���y����������ROV���әC����ROV�y�����õ����D�����c�y�T��ROV�˿���ϡ�ROV���әC����ROV����Ť���D�Q���l���_�����P�]��������
2��ROV���әC�����w����
2.1���Y��
����ᘌ���������ˮ1500m���͚≺����34.5MPa��Φ152.4mm�ܵ����l���y���P���OӋ��һ�N�����l���yROV���әC��������w��ROV���әC�����w�Y����D2��ʾ��
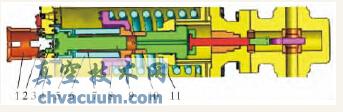
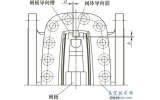
1—ROV�ӿ�;2—ROV���^;3—�����N�;4—���ЙC�����w�w;5—�����S��;6—��λͲ;7—�ݼy�S;8—��Ͳ;9—������ĸ;10—���ӗU;11—���ɡ�
�D2 �l���y���w�Y��ʾ��D
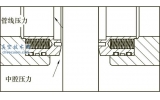
����ˮ���l���yҺ�����ЙC���������������ʽ������������B���ЙC������Һ������;��Һ��ϵ�y���F���ϣ��o�����F���ЙC�����������ܕr����ʹ��ROV��������˱������OӋ��ROV�ӿ���D3��ʾ��
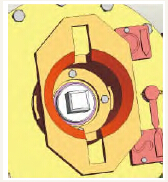
�D3 ROV�ӿ�
2.2������ԭ��
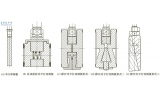
����ROV�����y�T�_���r������ROV�ӿ��cROV���ò��������B�ӣ���ROV���ù�����r������ص������£�ROV���^��r����D�����ݼy�S���D���ݼy�S�c������ĸ֮�g�������ݼy�B�ӡ����ڂ�����ĸ��������߅�ε���ڣ�������Ķ�λͲͬ�Ӿ����c֮��ϵ�����߅��ǻ�����DZ��C�˂�����ĸ�ڶ���֮�gֻ��ƽ�ӣ��������D����ˮ��ݼy�S��ROV����Ť�ص����������D�r��������ĸֻ�������\�ӣ��Ķ�������ĸ�Ƅӂ��ӗU�Լ����������\�ӣ����F�l���y�_����
����ROV�����y�T�P�]�r������ROV���ù���형r����D��ROV���^�����ݼy�S���D�������ݼy�S�̶������Ԃ�����ĸ�������\�ӣ�����ӗU�������ƄӵĿ��g���˕r����Ͳ�ڏ��ɻ؏������������ӂ����S�Լ�����һ�������\�ӣ����F�y�T�P�]��
2.3��ע�����
����(1)�����͚≺����34.5MPa���y�T�_���r����������^������ĸ�z�ܽY��������Ҫ���^�ߣ����������ݼy��ֱ���OӋ��У�����y�c��
����(2)�����OӋ�˜ʵ����PҪ��ROV��rᘔQ��ROV���^�r���ЙC��ʹ�l���y�_����ROV형rᘔQ��ROV���^�r���ЙC��ʹ�l���y�P�]����ˣ��OӋ�r�����]��ĸ�z�ܵ�����
����(3)Ӌ���Ť�غ�����ROV�И˜ʵ������ߣ��������˜�ISO13628—8�����PҎ���x�͡�
����(4)���ЙC����ǻ��Һ�w��䣬����OӋ�r��λͲ�͂��ӗU֮�g�����g϶��ϣ����ڶ�λͲ�ϲ��_������ͨ�ף���ֹ��Һ�w���Ӳ������a���^�������Ӱ��书�ܡ�
����(5)�ݗU�����r���D��������ݗU̎�O��ֹ���S�У���ֹ��Ħ���p�ęC����
����(6)ROV�ӿ��c��ǻ�����ʽ����1500mˮ��r�����^����ԓ̎�O�ø߉��ܷ�Ȧ��
3��ROV���әC���ݗU�OӋӋ��
����ᘌ���������ˮ1500m���͚≺����34.5MPa��Φ152.4mm�ܵ����l���y���_�����әC������͞黬���������ӣ�ԓ�C�����нY�����Ρ��o�������ڼӹ��Ͱ��b�ȃ��c���OӋ�����������ӵ��ݼy�������ݼy���乤ˇ�Ժã��������ȸߣ������Ժã�����õĂ����ݼy����������Ҫ���OӋ�ݼy�������ݼy������������ĥ�p�c�ݼy�������ϵĉ����������ٶȡ��ݼy����ֲڶ��Լ�������B���������P����������Ҫ���������ݼy�������ϵĉ���������Խ���������gԽ�����γ��^��ĥ�p����ˣ��ݼy�Џ�d2���M�㹫ʽ��
����ʽ�У�Q���ݗU���S���������ڰ�ȫ�OӋ���]������Ч��ȡ0.8���tQ=387.66kN������Ҫ����Ӿ����^�ߣ��d���^�����^�L����ȡΦ=4;[p]����ϵ��S�Ñ�����[p]=18MPa;����������ʽ(1)��d2≥58.70mm��������ʽ����ݼy�Џ�d2���ٰ����Ҙ˜��xȡ�������ݼy���Qֱ��d���ݾ�p�����d=65.0mm��d2=63.0mm��p=4.0mm��d1=60.5mm��
�����ݼy�΅����_�����ھ������i��Ҫ�����������߀��У���������Ƿ�M�����i�l��������
ψ≤φv (2)
��������ψ���ݼy�Џ����ǣ�φv���������Į���Ħ���ǡ�ψ��φvӋ��ʽ�飺
����ʽ���ݼy�^��n=1;Ħ����f=0.08;�����ݼy�����ͽ�α=30°��Ӌ���ψ=1.16°��φv=5.28°���M��ψ≤φv�����������M�����i�l����
�����ݗU�������^�����M�Џ���Ӌ�㡣�ݗU�����r�����S����(������)Q��Ť��T�����ã����У���ݗU���ȕr�����������ď�����Փ���Σ�U�����Ӌ�㑪��σca���䏊�ȗl���飺

����[σ]���ݗU���ϵ��S�Ñ�����ȡ[σ]=280MPa��Ӌ���σca=145.68MPa����֪σca<[σ]�����ݗU���ȝM��Ҫ��
4��ROV���әC���ķ��漰����
����ROV���әC�����������ݼy�@�N���s�����Sģ�ͣ�����Recurdyn�н�ģ���^�韩������������Solidworks������ģ�ͣ��ٌ���Recurdyn�У�֮������������|�����ԡ�
��������ROV���әC�����P�I���ݼy���ӣ��ݼy���ȵı��C���P��Ҫ��������C���әC������Σ�U���r�����ܰ�ȫ�������O��ģ�͵ļs���l������D4��ʾ����λͲ�̶���������ĸ�c��λͲ�������挦�R���O�Þ���|�s��������ĸ����ƽ�ƣ��������D;�ݼy�S�c��ĸ�������ݼy�s��;ROV���^�c�ݼy�Sͨ�^�Nᔂ��ӣ��O�Þ���|�s��;�S�к��S�����c�ݼy�S����|�s��;�O��ROV���^�Ľ��ٶȞ�25.12rad/s�����C����̕r�g(10s)֮�������\��1���г�;���]���m���ؓ�d����r�M��ģ�M������ĸ�±���ʩ��387.66kN�ĺ���;�����wģ��ʩ�������M�з��档

�D4 ģ�ͼs��
�����ڷ����У�����ϣ���˽���ĸ���ٶȡ�λ���c�r�g�Č����Pϵ;���Ӌ���ROV���^�����������M�Д�ֵ��C��ROV�x��;���y����ĸ�z�ܵ��S������ͬ�r�cӋ��Y���M�Ќ��ȷ���������Y����D5���D8��ʾ��
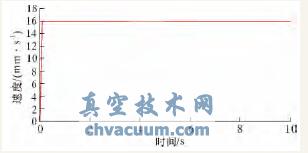
�D5 ��ĸ�ٶ�
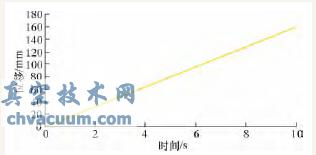
�D6 ��ĸ��λ��
�����ĈD5�͈D6���Կ�������10s�r��ĸ��16mm/s�����\����160mm���������y�T���OӋ�г̣������OӋҪ�ĈD7���Կ�����ROV���^�������؞�1389.8N·m���������ܵ��������������ã��c֮ǰӋ���Ť��1378.5N·m��ȣ���ֵ�ڔ������Ͽ��Ժ��Բ�Ӌ�����ͬ�ӝM���OӋҪ�ĈD8���Կ�������ĸ�z�ܽY�����S������387.476kN���������ܵ��������������ã��c֮ǰӋ���õ��S������ȣ���ֵ�ڔ������Ͽ��Ժ��Բ�Ӌ������ͬ�ӝM���OӋҪ�ķ�������Y�����Կ������ݗU���ȝM���OӋҪ���Mһ����C���OӋ�ĺ����ԡ�
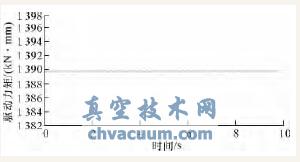
�D7 ROV���^��������

�D8 �ݗU���S����
5���Y���Z
����ᘌ���������ˮ1500m���͚≺����134.5MPa��Φ152.4mm�ܵ����l���y���OӋ��һ�N�����l���yROV���әC����ԓ�C�����нY�����ξo�������ܿɿ��ȃ��c����Q����ˮ���ӗl�����y���ܷ⡢�y�Գ��d�^���_�������OӋ�y�}�����������ROV���әC���OӋ���������Y���OӋ�������ݗU�M�Д�ֵ�OӋӋ�㡣ͨ�^��ROV���әC�����w���\�ӌW�̈́����W����Y���������Mһ����C���OӋ�ĺ����ԺͿ����ԡ�ROV���әC�����OӋ�ͷ�����������ˮ�y�T���OӋ���әC�����Ƶ춨����Փ���A��