С�ʹ�ƫ�D�|�VӋ��λ�Cܛ�����OӋ�c���F
������С�ʹ�ƫ�D�|�VӋ���{ԇ�^���У���Ҫ���|�VӋ��λ�Cܛ������λ�C�l���g��ָ����F������ƺ͌��x�����IJɼ���̎�����惦�ͷ��������ڴˣ����IJ���������ij����OӋ��������VC++ 6. 0 �h�����|�VӋ���ϙCλ�Cܛ���M���OӋ�c���F���|�VӋ��λ�Cܛ��ͨ�^CAN(Controller Area Network) �����c�|�VӋ��λ�C�M��ͨ�ţ����F����λ�C�Ŀ��ƺ͔���̎���������|�VӋ��λ�Cܛ����������������s���˹�̎�픵���Ĺ��������ҿ��Ԕ������r�ɼ��惦�������M���S�r�٬F�����������Ы@�����õĔ��������┵���āGʧ���{ԇ�Y���������|�VӋ��λ�Cܛ���OӋ���_�����к��Ĺ��̌����ԡ�
1������
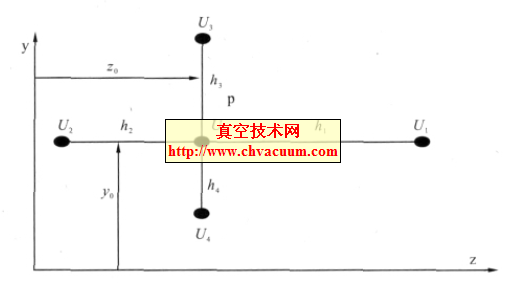
����С�ʹ�ƫ�D�|�VӋ��Ҫ�����Ƅ��O���ϻ��������M�К��w�ɷֵĶ����������|�VӋ��Ҫ���������֣�늿؆�Ԫ( ��λ�C) ���߉��Դ���|�VӋ��λ�Cܛ���ȽM��[1]���|�VӋ��λ�Cܛ��ͨ�^CAN ����[2]���|�VӋ��늿؆�Ԫ�M�В�����ƣ�ͬ�r��������̖�M�вɼ���������̎���ͱ��档�|�VӋ��λ�C����TI ��˾���a��32 λ���c�����ܵ�DSP ������̖̎��оƬ��������оƬ���c��λ�Cܛ��ͨӍ[3]�����pͨ��CAN ��������Ɇ���ָ��|�VӋԇ���͠�B����݆ԃָ��Ľ����Լ�ԇ���͠�B����ݔ���ȹ��ܡ��|�VӋ�����ɼ�ԭ����D1 ��ʾ��
2��С�ʹ�ƫ�D�|�VӋ��λ�Cܛ�����OӋ
2.1���|�VӋ��λ�Cܛ��ϵ�y�ܘ��c��������
������λ�Cܛ���_ʼ�\�к������M�г�ʼ���O�á�����CAN �����f�h����ʽ�O�á��������O�á�CAN ���ĞV���O���Լ�����ģʽ�O�õȡ�
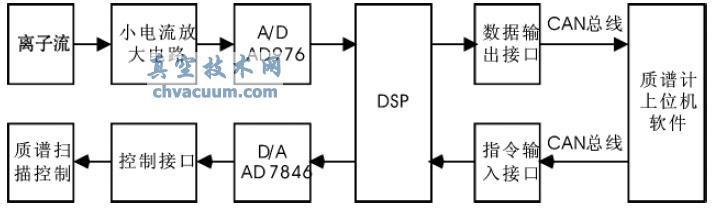
�D1 �|�VӋ�����ɼ�ԭ����D
�����ڳ�ʼ���O����ɺ���λ�C�ȴ������ˆT�l���_�Cָ���λ�C���յ���λ�C�l�͵��g��ָ������A���O�õ������_ʼ�����������������攵�����ı��ęn������2 ��һ�εĠ�B����݆ԃ�Լ�1 ��һ�ε�ԇ��݆ԃ����݆ԃ����ԭʼ�������浽�ı��ęn�С��ڳ����\�е��A�O�ĕr�g���Ԅ��˳������̣��ȴ������ˆT�l���P�Cָ�
������λ�Cܛ���м����ˌ�ԭʼ����̎��ģ�K��ͨ�^�ļ���Ԓ����_��λ�C�ɼ��Ĕ��������üs���Ĕ�����ʽ�������M�н������@�à�B������ԇ�������浽�������ı��ęn�С���ռ��g�W(http://shengya888.com/)�����|�VӋ��λ�Cܛ���������̈D����D2 ��ʾ��
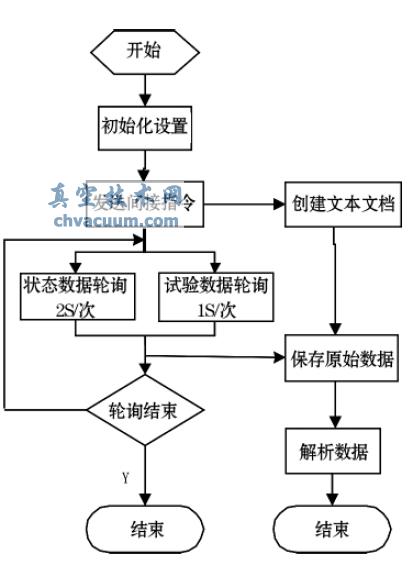
�D2 �|�VӋ��λ�Cܛ���������̈D
2.2���|�VӋ��λ�C�c��λ�Cͨ�Ņf�h
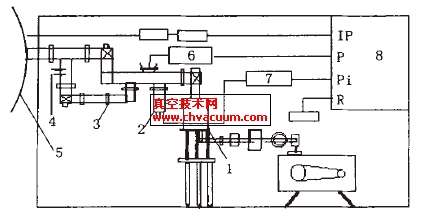
����С�ʹ�ƫ�D�|�VӋ��λ�C�c��λ�Cͨ�Ų��ؘ�CAN ��������λ�C��������SJA1000���ӿ�оƬ��PCA82C250����λ�Cͨ�^������USBCAN - II �ӿڿ��c��λ�Cͨ�š�������CAN�ӿڿ���ᘌ���VC + + ���̭h����DLL( �ӑB朽ӎ�) ������λ�Cܛ�����F�^����ֱ���{��DLL �ĺ������Կs��ܛ�����������ڡ�CAN ��������Ӆf�h��߉�·�Ӆf�h����CAN ���gҎ��2. 0A Ҫ���ÌӅf�h�OӋ�^���п��]��ʽ�ęz�y�����e�������Ա��Cϵ�y��ȫ�ɿ���һ��ͨ�Ź��c�ĕrЧ��Ӱ�����ͨ�Ź��c��ͨ�š���λ�Cܛ���г�ʼ��CAN �ӿڿ��c��ȫ�P�]CAN �ӿڿ������̈D��D3 ��ʾ��
![��ʼ���c��ȫ�P�]CAN �ӿڿ����̈D](/uploads/userup/1305/2323415611G.jpg)
�D3 ��ʼ���c��ȫ�P�]CAN �ӿڿ����̈D