���X�������X݆����(d��ng)��С�D(zhu��n)�غ˼�(j��)�y�T(m��n)늄�(d��ng)�b���ϵđ�(y��ng)��
����ͨ�^(gu��)SDZHС�D(zhu��n)�ض���D(zhu��n)�˼�(j��)�y�T(m��n)늄�(d��ng)�b�õijɹ��_(k��i)�l(f��)��(sh��)����Ԕ��(x��)�ؽ�B��2Z-X(��)�����X�������X݆����(d��ng)�ă�(y��u)�c(di��n)�����M(j��n)���˂���(d��ng)�ȡ�����(d��ng)Ч�ʺ��X���ص������Ӌ(j��)��;����������ӹ��`�(du��)�X���ص������Ӱ푣�����˲������ľ���ƫ���Լ��m��(d��ng)�Ӵ��X픈Aֱ��ƫ���(l��i)���a(b��)�ӹ��`�(du��)�X���ص������Ӱ푣���С�D(zhu��n)�غ˼�(j��)�y�T(m��n)늄�(d��ng)�b�ù��I(y��)��(y��u)���O(sh��)Ӌ(j��)�ṩ�˅�����
һ��ǰ��
�����˼�(j��)�y�T(m��n)늄�(d��ng)�b���Ǒ�(y��ng)���ں��վ�Ⱥ˹��I(y��)�^(gu��)�̿����I(l��ng)��ĽK�ˈ�(zh��)���O(sh��)�䣬���Կ��Ƹ��(l��i)�˼�(j��)�y�T(m��n)���_(k��i)�����P(gu��n)�]�������m���ں��վ�в�����ֱ�Ӳ����ĭh(hu��n)����
�������ں˼�(j��)�a(ch��n)Ʒ�п���Ҫ������O(sh��)Ӌ(j��)�˼�(j��)�a(ch��n)Ʒ�r(sh��)���ڝM(m��n)�㹦��Ҫ���ǰ����(y��ng)�M������ʹ���O(sh��)Ӌ(j��)�Įa(ch��n)Ʒ�w�eС�������p�����ĵͣ�����(du��)С�D(zhu��n)��(������ָ��С�D(zhu��n)�������(du��)����D(zhu��n)늄�(d��ng)�b�ã�ݔ���D(zhu��n)��10��100N·m;��(du��)���ֻ��D(zhu��n)늄�(d��ng)�b�ã�ݔ���D(zhu��n)��50��1000N·m)�˼�(j��)�y�T(m��n)늄�(d��ng)�b�õ��w�e������Ӱ����ľ�����������(d��ng)�C(j��)��(g��u)��Ŀǰ(�˼�(j��))�y�T(m��n)늄�(d��ng)�b�õ�������(d��ng)�^���Dz����U����(d��ng)���mȻҲ�܌�(sh��)�F(xi��n)�^����ٱȣ������ٱ��£����w�e�^�Y(ji��)��(g��u)����o�������҂���(d��ng)Ч���^�͡�
�������X�������X݆����(d��ng)������Y(ji��)��(g��u)�o��������(d��ng)Ч�ʸߣ����d�������\(y��n)�D(zhu��n)ƽ��(w��n)�ɿ�����С�������L(zh��ng)�Ҽӹ���������c(di��n)��Ŀǰ�ڹ��I(y��)���I(l��ng)�����һ���đ�(y��ng)�ã�Ȼ�������ں˼�(j��)�y�T(m��n)늄�(d��ng)�b���I(l��ng)��đ�(y��ng)�Ås�r�Ј�(b��o)�������ijɹ���2Z-X(��)�����X�������X݆����(d��ng)��(y��ng)����С�D(zhu��n)�غ˼�(j��)�y�T(m��n)늄�(d��ng)�b�õ�������(d��ng)����˼�(j��)�y�T(m��n)늄�(d��ng)�b�õă�(y��u)���O(sh��)Ӌ(j��)�ṩ�˺ܺõĽ��b��
��������(sh��)�x���c�O(sh��)Ӌ(j��)Ӌ(j��)��
�����P(y��ng)������O(sh��)������S��(zhu��n)�T(m��n)������վ�_(k��i)�l(f��)������������M(j��n)��ԭ��늄�(d��ng)�b�õ�С�D(zhu��n)��SDZH�˼�(j��)�y�T(m��n)늄�(d��ng)�b����D1��ʾ��ԓ늄�(d��ng)�b����Ҫ���g(sh��)����(sh��)�cָ��(bi��o)���¡�

�D1 SDZH�˼�(j��)�y�T(m��n)늄�(d��ng)�b��
����1)�Դ������AC380V±10%��50Hz��
����2)늄�(d��ng)�C(j��)������ʽ��S21��5min��
����3)���o(h��)�ȼ�(j��)��IP67��
����4)�h(hu��n)���l�����h(hu��n)���ض�-20��+60��;���س����£�����(du��)���<95%��
����5)���g(sh��)ָ��(bi��o)���D(zhu��n)���؏�(f��)���Ȟ飺≤±10%;�г��؏�(f��)���Ȟ飺≤±5°��
����6)�˰�ȫ�ȼ�(j��)��K2/K3��
����7)��������≤20kg��
����8)�����D(zhu��n)�ط�����5��15N·m��10��30N·m��20��50N·m��
����9)ݔ���D(zhu��n)�٣�10r/min��
����10)ݔ���S����D(zhu��n)Ȧ��(sh��)��10Ȧ��
��������������(xi��ng)Ŀ��ԓ늄�(d��ng)�b�õ��w�e�������ܵ����M(j��n)��ԭ��늄�(d��ng)�b�õ����ƣ�������(d��ng)������2Z-X(��)�����X�������X݆����(d��ng)�������(d��ng)��(ji��n)�D��D2��ʾ��
�D2 2Z-X(��)�����X�����ǂ���(d��ng)��(ji��n)�D
1.��(n��i)�X݆2 2.���X݆1 3.���X݆3 4.��(n��i)�X݆4
����늄�(d��ng)�b�ýY(ji��)��(g��u)�o�����M(m��n)�����w�e�������ȷ�������Ҫ��
�����@����Ҫ�Ă���(d��ng)�Ⱥ�Ч��Ӌ(j��)���Լ��ӹ��`�(du��)�X݆�X���ص�����Ӱ푵ĽǶ�ӑՓ2Z-X(��)�����X�������X݆����(d��ng)��С�D(zhu��n)�ض���D(zhu��n)�˼�(j��)�y�T(m��n)늄�(d��ng)�b���ϵđ�(y��ng)�á�
1.������(d��ng)�Ę�(g��u)�ɼ�����(sh��)�x��
����(1)������(d��ng)�Ę�(g��u)����һ��(du��)���X݆��һ��(g��)2Z-X(��)�����X�����ǂ���(d��ng)�p�ٙC(j��)��(g��u)��(g��u)�ɣ���D3��ʾ��

�D3 늄�(d��ng)�b��������(d��ng)�Y(ji��)��(g��u)�D
����(2)�X݆����(sh��)�x��
����1)һ��(j��)���X݆��E��F��ģ��(sh��)ȡm=1���X��(sh��)�քeȡ�飺ZE=42��ZF=93��
����2)2Z-X(��)�����X�����ǜp���X݆ģ��(sh��)���X��(sh��)�ȅ���(sh��)�Ĵ_�����M(j��n)�����X�������X݆�ą���(sh��)�x������(sh��)Ҋ(ji��n)��1��
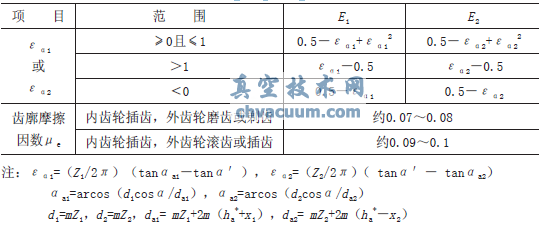
��1 ���X�������X݆����(sh��)[1]
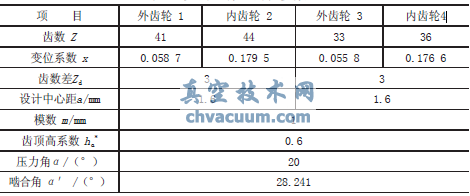
����ע����(n��i)�����X݆����(n��i)�X݆�X��(sh��)�c���X݆�X��(sh��)֮Zd=Z2-Z1=Z4-Z3�Q(ch��ng)���X��(sh��)�һ���X��(sh��)��Zd=1��8�Q(ch��ng)�����X�
2.����(d��ng)�ȵ�Ӌ(j��)��
�����M(j��n)�п�����(d��ng)�ȼ������Ӌ(j��)���Ŀ�����x����m�Ă���(d��ng)���ԝM(m��n)��늄�(d��ng)�b�õ���Ҫ���g(sh��)����(sh��)֮һ—ݔ���D(zhu��n)�ٵ�Ҫ����(d��ng)�ȵ�Ӌ(j��)�����¡�
����1)һ��(j��)���X݆��E��F�Ă���(d��ng)��iEF=93/42=2.214��
����늄�(d��ng)�b�õĿ�����(d��ng)�Ȟ飺i=iEF×iBx1=2.214×61.5=136.16
����늄�(d��ng)�C(j��)���~��ݔ���D(zhu��n)��һ���1400r/min���ɴ˿�֪ԓ�����ȝM(m��n)����늄�(d��ng)�b��ݔ���D(zhu��n)�ٞ�10r/min��Ҫ��
3.����(d��ng)Ч�ʵ�Ӌ(j��)��
���������X݆����(d��ng)��Ч�����u(p��ng)�r(ji��)�����(d��ng)���܃�(y��u)�ӵ���Ҫָ��(bi��o)֮һ��ԇ�(y��n)�о�����Փ�����l(f��)�F(xi��n)���ǂ���(d��ng)��Ч�����������c(di��n)��
����1)�����X݆����(d��ng)��Ч�ʣ��S��Y(ji��)��(g��u)�(l��i)�͵IJ�ͬ����ͬ��
����2)ͬһ��ʽ�������X݆����(d��ng)��Ч�ʣ��S����(d��ng)�ȵ�׃����׃����
����3)ͬһ��ʽ�������X݆����(d��ng)����(d��ng)�����Ą�(d��ng)����׃�r(sh��)��Ч���S֮��׃��
����4)�����X݆����(d��ng)Ч�ʵ�׃�������ܴߵ��_(d��)0.98���ϣ��͵Ŀɽӽ����㣬�������i��
����SDZH�˼�(j��)�y�T(m��n)늄�(d��ng)�b�õ�������(d��ng)�Ȟ�136.16������2Z-X(��)�����X�����ǂ���(d��ng)���ֵĂ���(d��ng)�Ȟ�61.5��������(d��ng)����ƫ���D(zhu��n)��(X )��
����ݔ�������(n��i)�Xݔ���S(��(n��i)�X݆4)���̶������(n��i)�X݆2(��D2��ʾ)��ԓ���ǂ���(d��ng)��Ч��Ӌ(j��)�����£�
����(1)һ��(j��)���X݆��E��F�Ă���(d��ng)Ч��ηEFֱ���xȡηEF=0.97��
����(2)2Z-X(��)�����X�������X݆����(d��ng)Ч��Ӌ(j��)��
����1)��һ��(du��)��(n��i)�����X݆��1��2�ć���Ч��η xe12��Ӌ(j��)�㡣��Ҫ��?x��n)?n��i)�����X݆��I(���X1�̓�(n��i)�X2)�����f(shu��)������(n��i)�����X݆����(���X3�̓�(n��i)�X݆4)�(l��i)ͬ���H���Ա�Ҫ���f(shu��)����
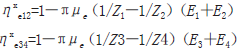
����ʽ��E1��E2��μe�Ĕ�(sh��)ֵҊ(ji��n)��2��
��2 E1��E2��μe�Ĕ�(sh��)ֵ
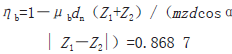
�������X݆����(sh��)���е����P(gu��n)��(sh��)��(j��)����������ʽӋ(j��)��ɵã�αa1=24.434°��αa2=16.664°;εα1=-0.54024��εα 2=1.665���ɱ�2��֪��E1=1.04024��E2=1.165��
��������(n��i)�X݆���X�����X݆���X�r(sh��)�xȡ�X��Ħ����(sh��)μe=0.1���tηxe12=0.9988��
����2)�ڶ���(du��)��(n��i)�����X݆��3��4�ć���Ч��ηxe34��Ӌ(j��)�㡣��E1��E2��εα1��εα2��αa1��αa2��Z1��Z2��da1��da2��d1��d2�е���(bi��o)1��2�Q��3��4��ͬ�팢�X݆����(sh��)���е����P(gu��n)��(sh��)��(j��)����������ʽ�����M(j��n)��E3��E4��εα3��εα4��αa3��αa4��ֵӋ(j��)�㣬�Ķ�Ӌ(j��)���ηxe34=0.9985��
����3)2Z-X(��)�����X�������X݆����(d��ng)�C(j��)��(g��u)�Ɍ�(du��)�X݆���ć���Ч��ηxe14=ηxe12ηxe34=0.9973��
����4)2Z-X(��)�����X�������X݆����(d��ng)�C(j��)��(g��u)�ć���Ч��ηε=[1+(ix4-1)(1-η xe14)]-1=0.86��
����5)�D(zhu��n)���S�е�Ч��ηb��
����ʽ�� μb——�L��(d��ng)�S��Ħ����(sh��);
����dn——�L��(d��ng)�S�Ѓ�(n��i)����
����(3) 늄�(d��ng)�b�õĿ�Ч��Ӌ(j��)��η=ηEFηεηb=0.72��SDZH�әC(j��)�Č�(sh��)�y(c��)Ч�ʞ�0.7���c��Ч��Ӌ(j��)��ֵ�ӽ���
4.�X���ص�����Ӌ(j��)��(Gs)
����2Z-X(��)�����X�������X݆����(d��ng)�ăɌ�(du��)��(n��i)�����X݆����횷քe�M(m��n)����Ե��X���ص�����l�����ܱ������(d��ng)�r(sh��)�l(f��)���X���ص����棬
������(n��i)�����X݆�����a(ch��n)������ėl���DZ�횴_��Gs12>0�cGs34>0���O(sh��)Ӌ(j��)�r(sh��)һ��ȡGs>0.5����(du��)�ڃ�(n��i)�X݆��I�����X���ص�����l��Gs12�ı��_(d��)ʽ�飺
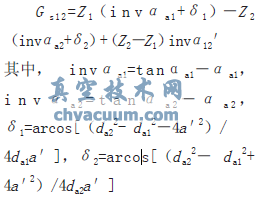
����ֻҪ����ʽ�е���(bi��o)1��2�քe�ÓQ��3��4�����ɵõ���(n��i)�X݆�����Gs34�ı��_(d��)ʽ��
����(1)�����]�X݆�ӹ��`�(du��)�X���ص������(y��n)��ֵGs12��Gs34��Ӱ푌��X݆�����P(gu��n)��(sh��)��(j��)����������ʽӋ(j��)��ɵã�
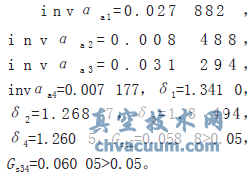
�������X���ص������(y��n)��ֵGs12��Gs34��Ӌ(j��)��Y(ji��)����֪��ԓ���X���(n��i)�����X݆����(d��ng)���ڲ����]�ӹ��`���Ӱ푕r(sh��)������(hu��)�a(ch��n)���X���ص����档
����(2)�����ӹ��`�(du��)�X���دB�����(y��n)��ֵGs12��Gs34��Ӱ푌�(sh��)�H��(y��ng)���У���������ӹ��`��Ĵ��ڣ��X݆���ϕr(sh��)����߀�Ǖ�(hu��)���F(xi��n)�p�ĸ���F(xi��n)��ʹ늄�(d��ng)�b�õ�������Ч���½�����(du��)�X���ص�����a(ch��n)��Ӱ푵ļӹ��`����Ҫ�У��X݆���XȦ����A����(d��ng)���X݆����(d��ng)�����ľ��O��ƫ��(ƫ���D(zhu��n)�۵�ƫ�ľ�)���X݆���X픈Aƫ���Լ��D(zhu��n)���S����϶�ȡ�
������������XȦ����A����(d��ng)������(l��i)�����X݆�ļӹ��`�(du��)�X���ص������Ӱ푣��Ă�(g��)�X݆������8��(j��)���ȣ��䏽��A����(d��ng)����Fr=0.045���@��(g��)�`�Ӱ푵���(n��i)�����X݆���Č�(sh��)�H����(d��ng)���ľࡣ���O(sh��)��(sh��)�H����(d��ng)�r(sh��)�����ľ���a''r���ta''=a'±Fr��
�����ɇ��Ͻ�a'=arcos[(a/a'')cosα]��֪����(sh��)�H����(d��ng)�r(sh��)�����ľ�a'���t���Ͻ����������a(ch��n)���X���ص����档��ֻҪ�(y��n)�C��(sh��)�H���ľ�a''=a'-Fr�r(sh��)�Ġ�B(t��i)�Ƿ���漴�ɣ����O(sh��)�X݆�Č�(sh��)�H����A����(d��ng)ƫ��Fr≤0.045��
����a''=a'-Fr=1.555���ta'=24.98°��invαa1=0.0298995��δ1=1.33198��δ2=1.26191��Gs12=-0.0534<0��
����������Ӌ(j��)���֪�������XȦ����A����(d��ng)ƫ��Ĵ��ڣ��Ϳ���ʹԭ������������X���(n��i)�����X݆�a(ch��n)���X���ص����档���ԣ����˴_�����X���(n��i)�����X݆�Ă���(d��ng)�|(zh��)������횲�ȡ��ʩ�����XȦ����A����(d��ng)ƫ�(du��)�X���ص������Ӱ푡����⣬��(du��)�X���ص�����Ӱ��^��ļӹ��`��߀�����ľ��O��ƫ����X픈Aֱ��ƫ���ͨ�����X݆����(d��ng)�O(sh��)Ӌ(j��)�У����ľ��O��ƫ��һ�㰴�O(sh��)Ӌ(j��)�փ�(c��)ȡ��ؓ(f��)ƫ��ֵ���������ľ�ȡؓ(f��)ƫ��r(sh��)����(sh��)�H���ľ��pС�ˣ�������(d��o)��Gs׃С���a(ch��n)���X���ص�����;��֮�����ľ�ȡ��ƫ��r(sh��)��ʹGs׃���a(ch��n)�����档���Ԍ�(du��)���X���(n��i)�����X݆����(d��ng)��(l��i)�v��(y��ng)ԓ�����������ľ�ƫ�ͬ�����X픈Aֱ��ƫ�(du��)��(n��i)�X݆��(l��i)�f(shu��)��(y��ng)ȡ��ƫ���(du��)���X݆��(l��i)�f(shu��)��(y��ng)ȡؓ(f��)ƫ���ஔ(d��ng)���X픸��M(j��n)һ���s�̣���ʹGs׃���a(ch��n)���X���ص����档
��������2Z-X(��)�����X�������X݆����(d��ng)���Բ������ľ�(���������XȦ����A����(d��ng)��Ӱ�ֱ�Ӽӵ����ľ��ϣ���ȡ���ľ�a''=a'-Fr)��ƫ���Լ��m��(d��ng)�Ӵ��X픈Aֱ��ƫ��(��(n��i)�X݆ȡ��ƫ����X݆ȡؓ(f��)ƫ��)���k����(l��i)���a(b��)�ӹ��`�(du��)�X���ص������Ӱ푡�
�����Y(ji��)�Z(y��)
��������2Z-X(��)�����X�������X݆����(d��ng)���г��d������(qi��ng)���ٱȴ�Ч�ʸߵȃ�(y��u)�c(di��n)���Ķ���ʹ���O(sh��)Ӌ(j��)��SDZH�˼�(j��)�y�T(m��n)늄�(d��ng)�b�ýY(ji��)��(g��u)�o�����w�eС�������p�����ĵͣ�����ˮa(ch��n)Ʒ�Ŀ���������ֻҪ��2Z-X(��)�����X�������X݆����(d��ng)���O(sh��)Ӌ(j��)�У���ֿ��]���ӹ��`�����،�(du��)�X���ص�����IJ�ͬӰ푣��Ķ����O(sh��)Ӌ(j��)�ϲ�ȡ����(y��ng)���a(b��)����ʩ�������O(sh��)Ӌ(j��)�����^�����С�D(zhu��n)�غ˼�(j��)�y�T(m��n)늄�(d��ng)�b�û����X�����ǜp������