�L���xݔˮ�������{(di��o)���y���ȿ���
����������Ҫ��B���L���xݔˮ�{(di��o)���^���������{(di��o)��(ji��)�y�ľ����{(di��o)��(ji��)��ͨ�^��BSCADA(����(sh��)��(j��)�ɼ��c�O(ji��n)ҕ����)ϵ�y(t��ng)�༉�����{(di��o)���е�VAG�{(di��o)���y�����N���Ʒ����ľ��ȅ^(q��)�e���`�����c�����H�ҵ�������{(di��o)��(ji��)���ȵĽ�Q����������߀�ɞ�������ƹ��̡�
1������
�����L���xݔˮ���̵��{(di��o)���y���ȿ���һֱ�����_ˮ�������{(di��o)��һ�����y�ȵ��n�}�����ڴ��ͼ�������ݔˮ���̣�ݔˮ��·�L���������{(di��o)��(ji��)�ľ���Ҫ��ߡ��L���xݔˮ����ˮ���^�̷dz���(f��)�s���oݔˮ�{(di��o)��SCA-DAϵ�y(t��ng)�Ŀ����^��������˺ܸߵ�Ҫ����������ݔˮ���̣������y�T�_�����Ӿֲ�ˮ�^�pʧ�ɽ��ܵ��������{(di��o)��(ji��)�ܵ�������
���������v���Ĵ�﷿ݔˮ����ȫ����Ӌʮ���_�{(di��o)���y���ֲ��ڶ��ٶ��Ĺܾ��ϡ��{(di��o)���y�(q��)�әC(j��)��(g��u)������Ӣ��Rotork��˾���a(ch��n)��늄��^����늄��^���������͈�(zh��)���������ṩ�����_�P(gu��n)���_��λ���P(gu��n)��λ��Ӳ���c��ͬ�r������(j��)�x�b߀��������ͨ�ſ���SCADAϵ�y(t��ng)ͨ�^ͨ�ſ��Բɼ�늄��^�Ć��]�����]���ء��y�Tλ�õȡ�ͬ�r��ͨ�^ͨ��߀���Ԍ�늄��^�M(j��n)��ȫ�г̻�λ�ÿ��ơ�
2��ϵ�y(t��ng)����
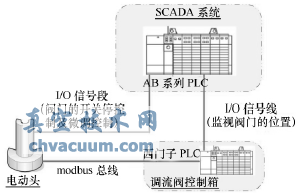
������������λ�C(j��)ϵ�y(t��ng)�����{(di��o)�����ĺ��{(di��o)�ȷ����ģ���λ�C(j��)ϵ�y(t��ng)����SCADAϵ�y(t��ng)LCU���{(di��o)���y������(Ҋ�D1)���{(di��o)�����Ŀ���ͨ�^�{(di��o)�ȷ������g�ӿ���SCADAϵ�y(t��ng)LCU��Ҳ����ͨ�^�����·ֱ�ӿ���SCADAϵ�y(t��ng)LCU��SCADAϵ�y(t��ng)�������pPLC��(g��u)�ܣ��{(di��o)�ȷ�����ͨ�^�p�W(w��ng)�c�pPLC�M(j��n)��ͨ�š�SCADAϵ�y(t��ng)�քeͨ�^IOӲ�Ӿ���Modbus�������{(di��o)���y�����䌦늄��^�M(j��n)�п��ơ�Modbus�������d�w��RS-485��RS-485��F(xi��n)�����I(y��)������RS-485���I(y��)����������Ƃ�ݔ�����п��ɔ_��(qi��ng)����ݔ���x�h(yu��n)�����c���V����(y��ng)���ڹ��I(y��)�����I(l��ng)��
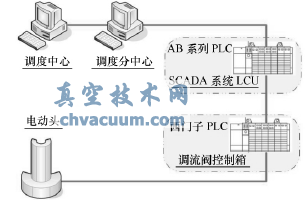
�D1 �{(di��o)���y���ƾW(w��ng)�j(lu��)��?f��)�ʾ�?/p>
������������������ϵ�y(t��ng)��늄��^�Ŀ��Ƶİ�ȫ���Ƿdz��ߵģ����е��·�����p�·�����е��O(sh��)������������ࡣ�����{(di��o)��(ji��)������鲻ͬ�·��Ӱ푶���ͬ��
3����(sh��)��(j��)����
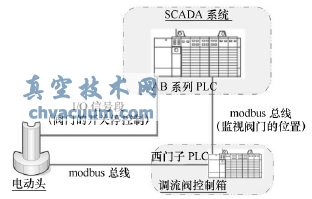
�����{(di��o)���y������PLC������ģ�M��ģ����2��Modbusͨ�Žӿڡ��{(di��o)���y������ͨ�^1��Modbusͨ�Žӿ��c늄��^�M(j��n)��ͨ�š��@ȡ늄��^�Ć��]�����]���ء��y�Tλ�õ�������Ϣ����늄��^�M(j��n)�п��ơ��{(di��o)���y�����������|�������\���ˆT�����ڬF(xi��n)�����{(di��o)���y�M(j��n)�п��ơ�SCADAϵ�y(t��ng)LCU�������_�P(gu��n)��ݔ��ģ�����_�P(gu��n)��ݔ��ģ����ģ�M��ģ����Modbusͨ�Žӿڡ����늄��^ֻ�x����Modbusͨ�Žӿڣ������y�Tλ����ֻ̖���{(di��o)���y�������PLC�ܲɼ�����
����3.1��SCADAϵ�y(t��ng)�@ȡ�y�Tλ����̖��;�������c
����(1)ͨ�^�c�{(di��o)���y�������PLC�M(j��n)��Modbusͨ�ū@�ã��@�õĔ�(sh��)ֵ�`����㣬�������ͨ������˕r�g���t(3s����)��
����(2)�{(di��o)���y�������PLC���_�ȓQ���ģ�M����ͨ�^ݔ��ģ�M����SCADAϵ�y(t��ng)�ɼ����r�g푑�(y��ng)���r(С��1s)��
����3.2��SCADAϵ�y(t��ng)�@ȡ�y�T��λ��̖��;�������c
����(1)ͨ�^IOӲ�Ӿ���ֱ̖�Ӳɼ��������{(di��o)���y�������PLC��Ӱ푣��ɿ��Ժͼ��r�Զ��dz��ߡ�
����(2)ͨ�^�c�{(di��o)���y�������PLC�M(j��n)��Modbusͨ�ū@�ã��ɿ��Ժͼ��r�Զ��^�
����3.3 SCADAϵ�y(t��ng)��늄��^�M(j��n)��ȫ�_ȫ�P(gu��n)���Ƶ�;�������c
����(1)ͨ�^IOӲ�Ӿ���ֱ̖�ӿ��ƣ������{(di��o)���y�������PLC��Ӱ푣��ɿ��Ժͼ��r�Զ��dz��ߡ�
����(2)ͨ�^�c�{(di��o)���y�������PLC�M(j��n)��Modbusͨ�ſ��ƣ��ɿ��Ժͼ��r�Զ��^�
����3.4��SCADAϵ�y(t��ng)��늄��^�M(j��n)��λ�ÿ��Ƶ�;�������c
����(1)ͨ�^IOӲ�Ӿ���ֱ̖�ӿ��ƣ�SCADAϵ�y(t��ng)ͨ�^ģ�M��ݔ��ģ��ֱ�Ӱ�λ�ÓQ��������̖���{(di��o)���y������PLC����(j��)�ɼ�������̖�M(j��n)�п��ƣ��˷��������У�����{(di��o)���y������PLC�����ׅ^(q��)��С�_�Ⱥ���̖�ɔ_��
����(2)SCADAϵ�y(t��ng)��Ŀ��(bi��o)�_���c�{(di��o)���y�������PLCͨ�Ųɼ����_�ȵČ��ȣ��_���y�T�Ą������|(zh��)�����H���_ͣ��ͨ�^IOӲ�Ӿ��팍�F(xi��n)�ģ��@�N�����Ŀɿ����^�ã��������Modbusͨ�ŵ����t����`���^��
����(3)SCADAϵ�y(t��ng)����(j��)Ŀ��(bi��o)�_���c�{(di��o)���y�������PLCݔ����ģ�M���_�ȵČ��ȣ��_���y�T�Ą������|(zh��)�����H���_ͣ��ͨ�^IOӲ�Ӿ��팍�F(xi��n)�ģ��@�N�����Ŀɿ����^�ã��r�g���t��ɵ��`��Ҳ��С��
����(4)SCADAϵ�y(t��ng)��Ŀ��(bi��o)�_��ͨ�^Modbusͨ��ֱ���°l(f��)���{(di��o)���y�������PLC��{(di��o)���y�������PLC�ٰѴ�ֱֵ���°l(f��)��늄��^�늄��^����(j��)��(d��ng)ǰλ���M(j��n)���Ԅ��{(di��o)��(ji��)���ơ����H���_ͣ��ͨ�^늄��^�Լ��팍�F(xi��n)�ģ��@�N�������ȫ��ͨ�ſ���(��Ҫ�M(j��n)�п��ƴ_�J(r��n)��߉�Д�)���Կɿ��Բ��Ǻܸߣ�ͣ�y�Ȅ���푑�(y��ng)���^�t���������`���С��
��������(j��)�������c���x��ͬ�ķ�ʽ������ȳ���N��ͬ�ķ�����SCADAϵ�y(t��ng)��(j��ng)�^����{(di��o)ԇ�ó��Y(ji��)Փ��ȫ�г̵Ŀ��Ʋ���IOӲ�Ӿ��M(j��n)��ֱ�ӿ����^������λ�ÿ��ƵĿ��Ʒ��������N�x�������_�l(f��)�{(di��o)���ܣ����a(b��)�����{(di��o)��(ji��)�IJ��㡣
4�����Ʒ���
����4.1������ͨ�Ųɼ����_��
�����������_���`����1%��1.7%֮�g������Ҳ��늄��^�����`��(���ڵ���1%)��Ӱ푡�
�������ȣ�SCADAϵ�y(t��ng)����(j��)�O(sh��)����Ŀ��(bi��o)�_�ȣ����c�{(di��o)���y��(d��ng)ǰ�_��(���{(di��o)���y������PLCͨ���́�)�M(j��n)�б��^���_���{(di��o)���y�_����Ҫ����߀�ǜp��;SCADAϵ�y(t��ng)ͨ�^I/O��̖������늄��^���_���P(gu��n)��ͣ(�˲��o�`��)��SCADAϵ�y(t��ng)�ھ����^�O(sh��)���_�Ⱥ͌��H�_�ȣ���(d��ng)���H�_���_(d��)���O(sh��)���_�ȕr��ֹͣ�{(di��o)���y�_(���P(gu��n))����(��(j��ng)�{(di��o)ԇ�^�죬����ʽ�_���`����1.2%��1.7%֮�g)��
�����_�y�^�̣�����SCADAϵ�y(t��ng)ͨ�^I/O��̖���o�y�T�l(f��)���_�������ͨ�^modbus�����O(ji��n)ҕ�y�T���_�ȣ���(d��ng)�_���_(d��)���A(y��)�O(sh��)ֵ�r��ͨ�^I/O��̖���o�y�T�l(f��)��ֹͣ���
�����@�N�����ă�(y��u)�c��늄��^��SCADAϵ�y(t��ng)�_�P(gu��n)�y����Ĉ�(zh��)�кܵ�λ������ͣ�y����Ĉ�(zh��)�Е���һ�����t�����y�T�_�����0.5%�ԃ�(n��i)���`��{(di��o)���y�������O(sh��)��Ĺ��ό��_�P(gu��n)ͣ�y�T��Ӱ��^С�����{(di��o)���y�������O(sh��)����ϵĕr��Ҳ�ܼ��r�M(j��n)���_�P(gu��n)ͣ�y����(ֻ�nj��F(xi��n)�����_�ȵ��A(y��)��)����ȫ���^�á�ȱ�c���_���`���^���M�㹤���{(di��o)��(ji��)Ҫ������ֻ�܌��F(xi��n)�{(di��o)���y�ĺ����_�P(gu��n)ͣ���A(y��)���_�ȿ��ƣ����ȱ������ɷN�����푑�(y��ng)�ٶ�Ҳ���^�t������D2��ʾ��
�D2 ����ͨ�Ųɼ����_�ȵĿ��Ʒ���
����4.2������ģ�M���ɼ����_��
�����������_���`����0%��0.4%֮�g������Ҳ��늄��^�����`��(���ڵ���1%)��Ӱ푡�
�������ȣ�SCADAϵ�y(t��ng)����(j��)�O(sh��)����Ŀ��(bi��o)�_�ȣ����c�{(di��o)���y��(d��ng)ǰ�_��(���{(di��o)���y������PLC��ģ�M���́�)�M(j��n)�б��^���_���{(di��o)���y�_����Ҫ����߀�ǜp��;SCADAϵ�y(t��ng)ͨ�^I/O��̖������늄��^���_���P(gu��n)��ͣ(�˲��o�`��)��SCADAϵ�y(t��ng)�ھ����^�O(sh��)���_�Ⱥ͌��H�_�ȣ���(d��ng)���H�_���_(d��)���O(sh��)���_�ȕr��ֹͣ�{(di��o)���y�_(���P(gu��n))����(��(j��ng)�{(di��o)ԇ�^�죬����ʽ�_���`����0%��0.4%֮�g)��
�����_�y�^�̣�����SCADAϵ�y(t��ng)ͨ�^I/O��̖���o�y�T�l(f��)���_�������ͨ�^�{(di��o)���y������PLC�����ρ���ģ�M���O(ji��n)ҕ�y�T���_�ȣ���(d��ng)�_���_(d��)���A(y��)�O(sh��)ֵ�r��ͨ�^I/O��̖���o�y�T�l(f��)��ֹͣ��������\��Խ�����y���`��ҲԽС��
�����@�N�����ă�(y��u)�c��늄��^��SCADAϵ�y(t��ng)�_�P(gu��n)�y����Ĉ�(zh��)�кܵ�λ��ͣ�y����Ĉ�(zh��)��푑�(y��ng)Ҳ���^���r�����y�T�_�����0.4%�ԃ�(n��i)���`����`�����ͨ�^�{(di��o)�����M(j��n)��С�����{(di��o)��(ji��)����K�`����Կ�����0.1%�ԃ�(n��i)���{(di��o)���y�������O(sh��)��Ĺ��ό��_�P(gu��n)ͣ�y�T��Ӱ��^С�����{(di��o)���y�������O(sh��)����ϵĕr��Ҳ�ܼ��r�M(j��n)���_�P(gu��n)ͣ�y���ƣ���ȫ���^�á�ȱ�c�DZ�����ֻ�܌��F(xi��n)�{(di��o)���y�ĺ����_�P(gu��n)ͣ���A(y��)���_�ȿ��ƣ�ͬ�r���{(di��o)���y������PLC��һ������ه�ԡ��C�������ɷN�����ă�(y��u)ȱ�c�����������(y��u)Խ�ġ���D3��ʾ��
�D3 ����ģ�M���ɼ����_�ȵĿ��Ʒ���
����4.3������ͨ���_�ȵ�ֱ�ӌ���
����Rotork��(zh��)������(n��i)���b�����^(q��)�{(di��o)�λ�����Á��{(di��o)����(zh��)���������^(q��)�����^(q��)���\���зdz���Ҫ���J(r��n)��ش_�������^(q��)���ɜpС��(zh��)��������ʎ�������L��(zh��)�����ĉ���[4]������(j��)���^(q��)�O(sh��)�õĴ�С��ͬ������ʽ�_���{(di��o)��(ji��)�`��0.1%��10%֮�g�������^(q��)����(sh��)�O(sh��)����С�����_(d��)0.1%���`�
������һ����SCADAϵ�y(t��ng)ͨ�^modbus�������Ȱ��_�Ȱl(f��)�ͽo�{(di��o)���y������(�˲��o�`��)��
�����ڶ������{(di��o)���y��������ͨ�^modbus�������_���O(sh��)ֱֵ�Ӱl(f��)�ͽo늄��^�������͵�늄��^�߂������{(di��o)��(ji��)������������������(y��ng)���_���M(j��n)���_�����P(gu��n)�]��
�����@�N�����ă�(y��u)�c��SCADAϵ�y(t��ng)���ƺ��Σ����`���0.1%�����ȱ������ɷN�����ߣ��Ҿ��Ȳ����y�T��С�����ơ�ȱ�c�����modbusͨ��Ӱ푣����������푑�(y��ng)�t������Ҫ���Ӵ_�J(r��n)��(bi��o)־����������°l(f��)��������Ҫͨ�^modbusͨ�ŵ�ͣ����F(xi��n)�y�T��ͣ�y����������ͣ�y��푑�(y��ng)Ҳ�DZ��^�t���ġ���ȫ���^�����ɷN�������D4��ʾ��
����4.4 �������}�_�_�����{(di��o)
�������ˏ��a(b��)�ڶ��N���Ʒ����IJ��㣬SCADAϵ�y(t��ng)�����{(di��o)���ܡ�ͨ�^��λ�C(j��)ϵ�y(t��ng)ֱ���°l(f��)һ�����}�_�r�g���_�����SCADAϵ�y(t��ng)����λ�C(j��)PLCͨ�^�_��ģ����500ms���_������l(f��)�����^�����(zh��)��500ms�Ą�����늄��^���ܵ����M(j��n)���c���\�У�ͨ�^�{(di��o)���Ԍ��F(xi��n)�y�T�ӽ�Ŀ��(bi��o)�_�ȡ���(j��ng)�^����{(di��o)ԇ����C�`���ܿ�����0%��0.1%�ԃ�(n��i)�������{(di��o)���ܲ��������������{(di��o)���y������PLC�����ơ�
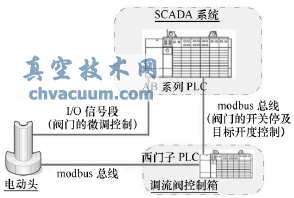
�D4 ����ͨ���_�ȵ�ֱ�ӌ���Ŀ��Ʒ���
5���������^
��������(j��)�\��Ҫ����Ҫ�x��ɷN���з��������{(di��o)���y�{(di��o)��(ji��)�Ŀ��Ʒ�������һ�N��������`���^����Ҫ����{(di��o)�����_(d��)��Ŀ��(bi��o)Ҫ�����⌦��С�_�ȵ��{(di��o)��(ji��)���^���ܣ����@�N���������Բ��ߡ��ڶ��N�����{(di��o)��(ji��)������0%��0.4%֮�g����푑�(y��ng)�r�g�죬��ȫ���^�ã����ھ��ȵ��`�����ͨ�^�{(di��o)�����M(j��n)���{(di��o)��(ji��)�����Ԍ������^�ߡ������N�����{(di��o)��(ji��)�`��̶���0.1%�����ȝM��Ҫ����푑�(y��ng)�t����ͣ�y���������r����ȫ�Բ��ߡ��C�����φ��}���ѵڶ��N������������������{(di��o)ʹ�ã�ͬ�r�ѵ����N����������÷����DZ��^�����ġ�����λ�C(j��)���ӷ����x���o��SCADAϵ�y(t��ng)PLC����(j��)��λ�C(j��)�°l(f��)�ķ����x����_��ʹ���ķN������