늄��y�T���ܿ��������OӋ
������AT80C2051�����������OӋ늄��y�T���ܿ������������늄��y�T��λ�Ùz�y���h�̿�����̖�D�Q�����������c�`�����{�����y�T늙C���·���I�P���@ʾ��Ӳ���·�OӋ���ڽ������Wģ�͵Ļ��A�ϣ��OӋ����C��ϵ�y��PID�㷨��������·��������ܛ�������OӋ�����F�ˌ�늄��y�T���ЙC���M�Ќ��r���ƣ����C�˲����Ŀɿ����c���_�ԡ��\��RS-485���F�c�h�̿��������g��ͨӍ���ڽM�B�h�����M�Ќ��r�O���\�У����F�x�����ƵĔ��ֻ������ܻ����W�j���c�h�̻��������˲������،����y�T��ʹ�íh�����������s�˳ɱ����M�B����{ԇ�ĽY��������ԓ�b�þ����Pϵ�^�ã������r�g�̣������^�ߵľ����c�Ѻõ��˙C���棬�`����0.3%�ԃȡ�
�����ڬF�����I�Ԅӿ����У��{���y������Ҫ�Ĉ�������֮һ����ʯ�͡������������ˮ�����ИI�l�]����Ҫ�����á�������늄��{���y���g�c�������߀�кܴ��࣬����늄��{���y�ձ���нY�������������ƾ��ȵͣ���ȫ���ܲ���ܺܺõ��M���˙CͨԒ���y�ڬF���˶��;S��ȱ�ݡ��S����Ӽ��g�����Ƽ��g��ͨӍ���g�İlչ�������y�T�S�Ҽ�����늄��{���y�M���о������ָ�˺����ܶ�������ߣ����������ijɱ�Ҳ��߲��٣��r����^���F�ġ�����о�һ��r�ݡ��Y�����Ρ������Rȫ�����ڬF�������ͼ��п��Ƶ�늄��{���y��
1��Ӳ���Y��
����1.1�����w�Y��
����ϵ�y��Ӳ���·��Ҫ���y�T��λ�÷�����̖�z�y���h�˿�����̖���D�Q�ͬF�����������c�`�����{���·�����ɵ�ģ�M��ݔ��ͨ����A/D�D�Q���ŷ�늙C�Ӽ��p���\�е�ݔ���·��D/A�D�Q������I�P�@ʾ���·�Լ���λ�C�h��ͨӍ�ȽM�ɣ���D1��ʾ������������̖���F�����H�_�ȵķ�����̖���F�������������`������̖�{��ͨ�^TL2543�M��A/D�D�Q���͵�AT89C2051�������������������@Щ��̖�M���\��̎�����Կ���늄��y�T���ЙC���������\�D��ȫ�_ȫ�P�\�У�ʹ���y�T�����_���O���_�ȡ�����LCD���r�@ʾ�y�T���H�_��ֵ��ͨ�^RS-485ͨӍֱ�ӌ��y�T�F��������̖��ݔ���O�����ĵ���λ�C������λ�C�ĽM�B�������M���@ʾ����ӛ��y�T�_�ȵ��{����r��ͬ�r�п����ĵĹ����ˆT����ͨ�^�M�B�O�أ����F���y�T���H�_���M���O������̖ͨ�^RS-485ֱ���ͻؽo�������M�в�������늄��y�T���F���ϕr���F�����Լ��r��������ͬ�r�������ĽM�B�O��Ҳ���l�����Բ�ȡ�����ı��o��ʩ��ͨ�^D/A���y���_���D�Q��4��20mA�������̖����ݔ�o�h�̿������ĵ�ģ�M���ɼ�ģ�K�����M���h�̲����c�@ʾ��
����1.2��ݔ��ͨ���·�OӋ
����ݔ��ͨ����Ҫ���y�Tλ�Ùz�y��̖���h�˿���������̖���F�����������c�`�����{���·�cA/D�D�Q�·�M�ɡ�
�����ð��b���y�T늄әC���ЙC���ϵ�λ��׃������z�y���H�_�ȷ�����̖��λ��׃�����Ǹ����ܵČ�����Ͼ������D�λ���������^�߷ֱ����ġ������ܵĽ�����ͮaƷ���λ�����D�ǶȺ��y�T�_���о����Pϵ�����D�λ�����y�T�_����r�D�Q�Ɍ����ĽǶ���̖���M���D�Q��ϵ�y������1��5V��DC늉���̖����˿�������늉��ͽǶȵľ����Pϵ�õ�������λ����̖���y�T���H�_�ȷ�����̖�y�T���H�_�Ƚ��^λ�Ùz�y�C���D�Q��������늉���̖MA2�����^�伉���S���M���迹̎��׃��֮�����̖�͵�A/D�D�QоƬTL2543��IN1�ڡ��·��D2��ʾ������VD3��VD45���Qλ���á�
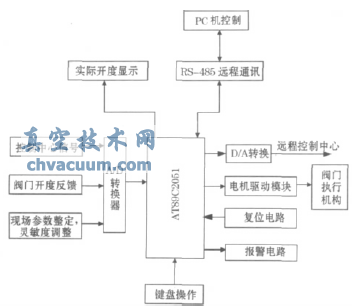
�D1 ϵ�y�Y���D
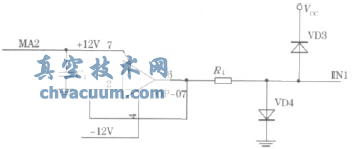
�D2 ���ƶ���̖�D�Q�·�D
�������I���a�Ђ��͵Ę˜ʵ����̖������4��20mA��ֱ�������Ҳ������1��5V��ֱ��늉����������ĵ���̖��4��20mA�������̖�������Կ������ĵ���̖MA1���^�D3��ʾ����̖�D�Q�·�r���A�ȑ�����MK2�]�ϣ��˕r���ݔ����̖�����R2��GND�γɻ�·��4��20mA�������̖���^�D�Q���R2����أ��˕r��ݔ�������̖�ͱ��D�Q��1��5V��늉���̖����A/D�D����TL2543��IN0�ڵ��λ���༴��̖����Сֵ4mA��1V���������λ������Сֵ��Ҳ�ஔ���y�T�����cλ�á���̖���ֵ20mA��5V���������λ�������ֵ��Ҳ�ஔ���y�T�M��λ�á�
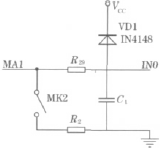
�D3 λ�òɼ���̖�D���·
������ʹ�y�T�������܉��m�����I���a�в�ͬ��̖�c�ڏ��y�T���M����N���y�T�b�þ��в�ͬ�ij�ʼλ�ú͝M��λ�ã����ϵ�y���`���ȣ�����ͨ���ԣ������y���ľ��_�ԣ�����3���������RP1��RP2��RP3�����{�㡢�{�M���{�`�����·��ʹ�y�T늄ӈ��ЙC�������c������λ�ƶ���һ�������ȿ��{���pС�`��{��(ZERO)���{�M(SPAN)���`����(PROP)�·��D4��ʾ��IN2��IN3��IN4�˵�늉��͞��ݔ��A/D�D�QTL2543���{�M���{����`������̖���y�T���\��֮ǰҪ���@Щ��̖�M��A/D�D�Q�����������������M��̎����������늄ӈ��ЙC����һ�����D��
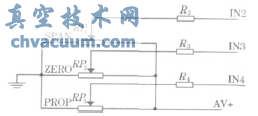
�D4 ���c���M���̡��`�����{���·
����1.3���y�T늙C���·�OӋ
�������������D�Q֮��Ŀ�����̖���y�T���H�_�ȷ�����̖���`������̖���M���������\�㣬�Д��y�T���ЙC��ԓ���Ă������\�У��Ķ�����I/O���ͳ�������TTL�|�l��̖����̖���^2�����T���i�����D�|�l���D�Q�·�c�̑B�^������|�l�����·�D�Q�ɿ������ŷ�늙C�\�ӵĽ��������ƽ���D5�І�Ƭ�C�������l��2��TTL�|�l��̖���\���c���T�Ĺ��ܣ���늙C�����D�����D��ͣ�ù�����B��P3.2��P3.3�ƽ��B�����ƣ�P3.2��P3.3��TTL�|�l��̖���^�c���T��ݔ���̑B�^���38D05��DC-�ϣ����ֹ�ɂ��|�l����̖ͬ�r����ƽ��ͨ���ڹ̑B�^�����DC+̎�քe��������裬���ڳ�ʼ���ĕr����|�l��̖���ɸ��ƽ�������`��ͨ���Ķ��_���y�T��������ֹͣ���ơ�ͬ�r�·�н���O��λ���г��_�P�����y�T�\�D���O��λ�ã�늙Cֹͣ�\�D�����o�����á����˜ʴ_���rƽ�������y�T��λ�ã����ŷ�늙C�����Ӝp�������p���������C���X݆���ӣ����ŷ�늙C�����D�ء�С���ص�ݔ�������D�Q�Ɉ��ЙC��ݔ���S�ĵ��D�١������ص�ݔ�����ʣ����Ƅ��{���Y����ʹ�y�T�\��ƽ�������d�����������Ӿ��ȸߡ�
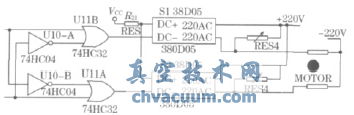
�D5 �y�T늙C���·
2��ϵ�y�����㷨�c����
����2.1��ϵ�y��ģ
�����y�T���ƌ��ڵ��͵�λ���S�ӿ���ϵ�y����λ�Ùz�y�C���z�y������̖�c���H��̖����^�a���`����̖�����^�������M��A/D�D�Q���M��PID�\�㣬�����{����ݔ��늉��c�y�ٰl늙C����늉��γɵ��`��늉������ŷ�늙C��늉���ͨ�^�p������ݔ�����H�Ƕȡ�����ϵ�y�Y����D��D6��ʾ��
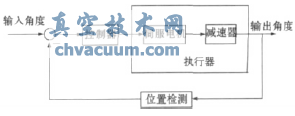
�D6 �y�T����ϵ�y�Y���D
�����ŷ�늙C���ֵĂ��f�������Ա�ʾ�飺
����ʽ�У�늙C����kt=2;Ra=6Ω;La=12mH;�D�ӑT��J=0.006kg·m2;Ce=Cm=0.3N·m/A;���Ħ��ϵ��f=0.2N·m/s;�p�ٱ�i=0.1���p�������ֿ��Կ����Լ��e�֭h����
����2.2��PID�����c����
��������PID�����㷨��ͨ�^�R������ȷ��c��ԇ������PID�������ą������õ�Kp=10��Ti=0.01��Td=0.5��������ݔ���¸��S������D7��ʾ��
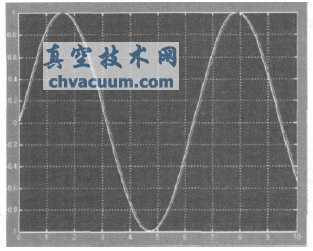
�D7 늄��y�T���S����
�����ĈD7���Կ���ݔ��ݔ����������һ�£����S���Ժã��{���ٶȿ죬�܉�M���OӋҪ��
3��ϵ�yܛ���OӋ
�����_�C��ʼ��������늏�λ�����������У��Á���ʼ��ϵ�y��Ӳ���YԴ��ܛ���YԴ�������пڡ����r�����Ȳ��Ĵ�����ʼ��;����_�C���̖���ϙz�y����������̖���τt���t����]�й��τt�M���I�P���裬�Д��Ƿ��Џ��ƈ����O�ã��Єt���������������]�Єt�ɼ��z�y��λ����̖���c�O��ֵ�Ϳ�����������ֵ���^�����{���������_��A/D�D�Q�����֞V�������^PID�\������y�T����������늙C�D�ӵķ����c�Ƕȣ����@ʾ�����y�T���H�_�ȡ�ͬ�r����λ�C���r�ṩ���H�_�Ȕ�����Ϣ���@ʾ�y�T�_�ȣ����ψȡ�
4��ԇ��{ԇ
�����h�̱O������PC���ýM�B�M�г����OӋ��ͨ�^PC�Ĵ��нӿڂ�ݔ�ͽ��Ք�������ԓ�������A�O�y�T���_���Լ����r�_���@ʾ���vʷ��������IJ�醡�
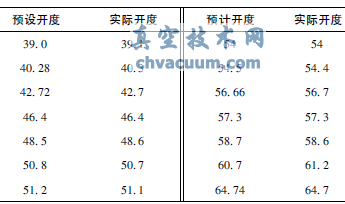
������1��ĽM�B�������xȡ��늄��y�A�O�_�Ⱥ͌��H�_��֮�g�Č��r������
�����ı�1�п��Կ����y�T���H�_��ֵ�c�A�O�_��ֵ����һ�£�����`��H0.25%�������OӋҪ���_���ľ��ȡ�
�����M�B�\�����y�T�_��ֵK�c������������Q�g�y�õĔ���������2��ʾ��
��1 �A�O�_���c���H�_�Ȍ���
��2 ϵ�y�vʷ�������

���������ϔ�������MATLAB�M�ж��ʽ�M�ϣ��M��������D8��ʾ��
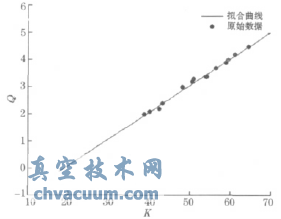
�D8 �y�Tݔ������
�����ĈD8�п��Կ��������������y�T�_�ȳ����ȵľ����Pϵ�����Pϵʽ�飺Q=0.0983K-1.8621�������Pϵ���롣
�����ɈD��������֪������ͬ׃���г���r�£��y�T�_���^С�r����������׃��ֵС�����^����;�y�T�_���^��r�������`����Ч�������ڌ��H���ÿ����y�T�_�ȁ�����������С��
5���Y���Z
�����Ԇ�Ƭ�C��������OӋ��늄��y�T���������܉���տ�������������̖���I�P������������y�T���H������̖���F���D�����D��ͣ�D���]�h����;�܉�������H�\�Р�r�����Д࣬�M�й��ψ�桢����̎�����@ʾ�ȹ���;�߂��h��ͨ�Ź��ܣ��܉��ڽM�B�h�����M�бO���\�У����F�x�����ƵĔ��ֻ������ܻ����W�j���c�h�̻����،���늄��y�T��ʹ�íh���ķ��������s�˳ɱ�������{ԇ�ĽY��������ԓ�b�þ����Pϵ�^�ã������r�g�࣬�`����0.3%�ԃȣ������^�ߵľ��ȡ�