늄ӿ��{ʽ�ӑB����ƽ���y��ĩ��늄��{���������y�Y�ϵ�ˮ��ƽ���c���Ʋ���
���������˼��п��{ϵ�yˮ��ʧ�{��ԭ��ͽ�Q��ʩ��ͨ�^���^ĩ�˺㉺�����ϵ�y�͑���늄ӿ��{ʽ�ӑB����ƽ���y�Ŀ���ϵ�y�Ŀ���ԭ���Լ�׃�����l���µ��ܺĸߵͣ��о����@�ɂ�����ϵ�y���ܾW���{���y��������������Ӱ푣����w�������O��Ч�ʌ�ϵ�y���ܵ�Ӱ푡�
����
������ȫ���ܜp�ŵĴ�h���£����п��{ϵ�y�ܺĵ���Ч���ͣ���������������Ĺ��ܜp������һ����ؕ�I��Ȼ�����{ϵ�y�Ĺ��ܑ�ԓ�ڝM��ؓ��Ҫ��ėl�����M�У����ڴ˻��A������ϵ�y�ܾW��ȫ��ˮ��ƽ����O��ĸ�Ч���\�У��@�Ӳ��ܱ��Cϵ�y�\�еĽ����ԡ���ˣ��������؏�ˮϵ�y��ȫ��ˮ��ƽ��Ϳ��ƃɷ�������䌦ϵ�y���ܵ�Ӱ푡�
1�����п��{ϵ�yˮ��ʧ�{ԭ���Լ���Q��ʩ
����������п��{ϵ�yʧȥˮ��ƽ�⣬��ʹijЩ�^�������������_�����OӋҪ�����ijЩ�^��̫���̫�ᣬ�����������C���Q�������O����F���ϡ�����ijЩ�^���ˮ�����_�����OӋ�����Ć��}�������üӴ�ˮ�ù��ʵĽ�Q������ʹ����h·�_���OӋ���������������������h·�������h�h���^�OӋ������ˮ���ܺĴ�����ӣ������ڌ��F���п��{ϵ�y���ܺ��\�С��錍�F���{ˮϵ�y��ˮ��ƽ�⣬���õĴ�ʩ�У��ڹ�����ˮ�������O����ͨƽ���·;�^���·�ϲ���ͬ��ˮ��ϵ�y���������ܹ����pС֧�ܹ�;ʹ���o�Bƽ���y�ȡ��@Щ��Q�����]��ץסˮ��ʧ��İY�Y���෴�еķ���ͨ�^�����ܺā�M��ĩ�˵�Ҫ�����w��ˮ��ʧ��Ĵ��ڡ�����ĩ����������һ����ˮ�������͓P�̲����п����Ǜ]�к���ƥ�䣬äĿ���ˮ���OӋ�P�̺����������H����ˮ�ó�Ͷ�Y�����������\�гɱ�;����ˮ�ز������������C���������Ǜ]�а�������Ч��ݔ�䵽ĩ���O�䣬������ˮ�ز���CҪ���^�ߣ����Hʹ���C��Ͷ�Y�����ҕ����C�����ڵ�Ч���r�£��������C���\�гɱ���߀�������ļ�ĩ�����L�ض��^�ͣ����L�ܵ��Y¶������]�����õĚ����M�����ϣ������¿��{���Įa���ȡ�ͬ�̹�·���o�Bƽ���y�����m��������ϵ�y�ı��^���ε�ƽ�ⷽʽ���S��׃����ˮϵ�y�ďV�����ã�ͬ��ϵ�y��¶����������ȱ�c�����ӑBʧ��ͻ�����o�Bƽ���y���H��������׃����ϵ�y�Љ����_�ӌ��µ�ʧ��F��Ϳ����y��ʧ�{�F���ڸ�����·�����������{��׃����ϵ�y��߀�����˾ֲ�������������������ˮ�õēP�̣�����������ϵ�y�ܺĵĽ��͡�
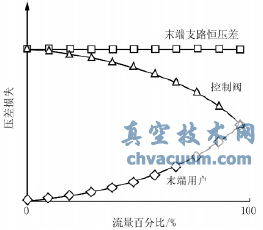
�����S��ˮ��ƽ�⼼�g�IJ����������錍�Fϵ�y��׃�����\�У�����ϵ�y�ӑBƽ�⣬늄ӿ��{ʽ�ӑB����ƽ���y�đ�����u���ࡣ�c���y��ƽ���{�ط�ʽ��ȣ�����늄��{���y�Ŀ���ϵ�y��������׃�Qϵ�y���s�����ƾ��ȡ�푑��ٶȡ������Զ����ܵ�Ӱ푣����ЙC��һֱ̎���{����B����늄ӿ��{ʽ�ӑB����ƽ���y�������ˆ΅������κ�������߉��ʡ���ˉ���y���h���͜yԇ�O�䣬ֻҪ��������ָ���x���_�ȾͿ��Ԍ��F���_���ƣ��������ϵ�y�dz����Σ�����푑��졢���ƾ��ȸߡ������Ժõ����c�������ԭ����D1��ʾ��ͨ�^������λ�C���������ֵ̖�Ĵ�С����׃�y�T���_�ȣ��{���O���������ԝM��ĩ���Ñ�׃ؓ�ɵ�Ҫ��
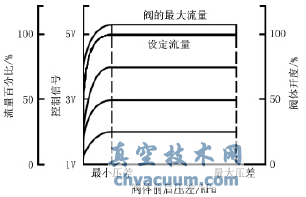
�D1 늄ӿ��{ʽ�ӑB����ƽ���y������-����-�_���Pϵ
2��늄ӿ��{ʽ�ӑB����ƽ���y�Լ�ĩ��늄��{���������y������׃��ǰ�ܾWϵ�y��ˮ���\�й��r�c��Ӱ��c�ܺķ���
2.1��늄ӿ��{ʽ�ӑB����ƽ���y��ϵ�y�Ŀ���
����늄ӿ��{ʽ�ӑB����ƽ���y�Ŀ���ԭ����D2(�D��������քe��֧·�����������������ܾW����������������)��ʾ������֧·�����·������������������ϵ�y���������h·�_���OӋ����Q1�r������h·��������Q2���tϵ�y�Ŀ�����Q4=Q1+Q2���˕r�������h·�ĄӑB����ƽ���y���õ��_�乤������ʼ�����B�c��ԓ֧·���迹ֵ�S��ϵ�y�����������Ӷ�׃��Ȼ�����֧·�ĄӑB����ƽ���y����ͨ��e���OӋ����Q3�����_���µ����ֵ���迹ֵS���ֺ㶨��׃�������S����׃���Զ�����Pϵ����ֱ�����֧·�����_���OӋ����Q3���˕r��ϵ�y���OӋ����Q5=Q1+Q3�������ƽ���B�����֧·�ĄӑB����ƽ���y����̎���乤���������ʼ�c����������֧·�ĄӑB����ƽ���y̎�����������������ȡ���B�cA��D֮�g�ĉ���Δp���ǃɂ�֧·��������ӑB����ƽ���y���������ԄӸ�׃�y�w����ͨ��eƽ���@һ������������S�ֹܾWϵ�y��ƽ�⡣
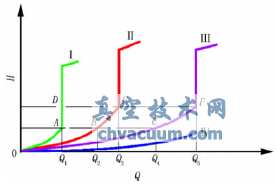
�D2��늄ӿ��{ʽ�ӑB����ƽ���y����ԭ��
2.2���ɂ�ϵ�y����׃�����ܺĴ�С�ı��^����
������ȫؓ���\�еėl����늄ӿ��{ʽ�ӑB����ƽ���y����ϵ�y�е�ĩ��֧·����Δp1�cĩ���Ñ��㉺�����ϵ�y��ĩ�˿��Ɖ���Δp2(�������l��׃����늄ӿ��{ʽ�ӑB����ƽ���y����ϵ�y�е�ĩ��֧·����׃��Δp'1����ĩ���Ñ��㉺�����ϵ�y��ĩ�˿��Ɖ���㶨��Δp2)֮�g���Pϵ�Լ��\���^����ϵ�y����h·������׃���cϵ�y�ܺ��кܴ���Pϵ��
����1����Δp1<Δp2�r���ڃɂ�ϵ�y�ĸ�ĩ���Ñ�ؓ��׃����ͬ����r�£��oՓ������ΰl��׃����Δp1ʼ�KС��Δp2��ϵ�y�\�й��r�c��D3��ʾ��L1��L2��L3��L4�քe�鲻ͬ�l����ˮ�õ�����������R1��R3�քe��늄ӿ��{ʽ�ӑB����ƽ���y����ϵ�y����׃��ǰ��ܾWϵ�y�Ŀ���������R2��ĩ�˺㉺��ϵ�y�Ŀ����������ĈD3�п��Կ�����늄ӿ��{ʽ�ӑB����ƽ���y����ϵ�y�ܾW�����^С���ܺ��^�͡�
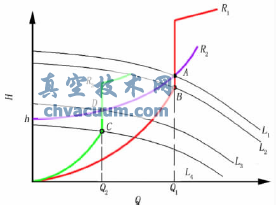
�D3 늄ӿ��{ʽ�ӑB����ƽ���y����ϵ�yĩ��֧·����
����С��ĩ�˺㉺��ϵ�y�Ŀ��Ɖ���r��ϵ�y�\�й��r�c
����2����Δp1=Δp2�r���ڃɂ�ϵ�y��ĩ���Ñ�ؓ��׃����ͬ����r�£�����׃�����ϵ�y�ܺ���r�飺
������늄ӿ��{ʽ�ӑB����ƽ���y����ϵ�y�����֧·�ĉ���Δp'1���ֲ�׃�r��ϵ�y�\�й��r�c��D4a��ʾ��L1��L3��L5��L6�քe�鲻ͬ�l����ˮ�õ�����������R4��R5�քe��늄ӿ��{ʽ�ӑB����ƽ���y����ϵ�y����׃��ǰ��ܾWϵ�y�Ŀ���������R2��ĩ�˺㉺��ϵ�y�Ŀ����������ĈD�п��Կ����ɂ�����ϵ�y�ĹܾW�����������������ͬ�������@�ɂ�ϵ�y���ܺ���ͬ��
�����ڮ�늄ӿ��{ʽ�ӑB����ƽ���y����ϵ�y�����֧·�ĉ���Δp'1׃С�r��ϵ�y�\�й��r�c��D4b��ʾ��L1��L3�քe�鲻ͬ�l����ˮ�õ�����������R6��R7�քe��늄ӿ��{ʽ�ӑB����ƽ���y����ϵ�y����׃��ǰ��ܾWϵ�y�Ŀ���������R2��ĩ�˺㉺��ϵ�y�Ŀ����������ĈD�п��Կ���늄ӿ��{ʽ�ӑB����ƽ���y����ϵ�y�ĹܾW���������^С����늄ӿ��{ʽ�ӑB����ƽ���y����ϵ�y�ܺ��^�͡�
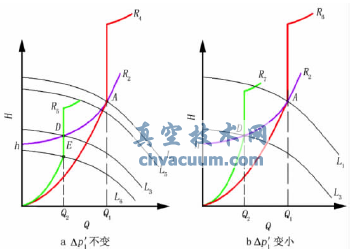
�D4��늄ӿ��{ʽ�ӑB����ƽ���y����ϵ�yĩ��֧·����
��������ĩ�˺㉺��ϵ�y�Ŀ��Ɖ���r��ϵ�y�\�й��r�c
����3����Δp1>Δp2�r���ڃɂ�ϵ�y��ĩ���Ñ�ؓ��׃����ͬ����r�£�����׃�����ϵ�y���ܺ���r�飺
����������׃����늄ӿ��{ʽ�ӑB����ƽ���y����ϵ�y�����֧·�ĉ���Δp'1���ֲ�׃�r������Δp'1�pС������Ȼ��Δp2��r��ϵ�y�\�й��r�c��D5a��ʾ��L1��L3��L7��L8�քe�鲻ͬ�l����ˮ�õ�����������R8��R9�քe��늄ӿ��{ʽ�ӑB����ƽ���y����ϵ�y����׃��ǰ��ܾWϵ�y�Ŀ���������R2��ĩ�˺㉺��ϵ�y�Ŀ����������ĈD�п��Կ���ĩ�˺㉺�����ϵ�y�ĹܾW�����^С���ʴ˕rĩ�˺㉺�����ϵ�y�ܺ������^�͡�
�D5 늄ӿ��{ʽ�ӑB����ƽ���y����ϵ�yĩ��֧·����





