����SolidWorks��ANSYS Workbench�������ɶȺ��әC���˵Ľ�ģ�c�����OӋ
�����\��SolidWorks ܛ���OӋ�������ɶȺ��әC����ϵ�y��̓�M�әC�������C�����o���Wƽ�ⷽ�̣������˙C���˵��o�B�������^��ͨ�^ANSYS Workbench ���C�����P�I��λ�M������Ԫ��������K�o���˙C���˃����OӋ������
��������
�����C���˼��g���o�Ɇ���δ���đ����Ը��g����M�C�������𡣹��I�C�����ǙC���˼��g����Ҫ��֧���ڸ��N�C�����У����I�C���ˑ����^�磬�lչ�����졣ͬ�r�����I�C���˼��g�IJ����M��һֱ�������C���ˌW�Ƶİlչ��ʹ�C���˵đ����I��Ĺ��I�Uչ��܊�á����g��ˮ�¡��t�������յȸ����I����������I������Ҫ�Ĺ�ˇ���g֮һ�����ڙCе���졢�˹��I�����պ��졢������ͨ��ʯ�ͻ�������������ӵ��ИI�еđ���Խ��Խ�V�����S����Ӽ��g��Ӌ��C���g�����ؼ��C���˼��g�İlչ�麸���^���Ԅӻ��ṩ��ʮ�������ļ��g���A����20 ������ڰ��ԄӺ������C�O���Լ��ԄӺ��Ӽ��g�ȷ���ȡ�����S���к͑��óɹ������������^���Ԅӻ����ɞ麸�Ӽ��g���L�c֮һ����21 ���o���M���켼�g�İlչҪ������������Ԅӻ����a�ѳɞ�����I���a�lչ��څ�ݡ�
1�����әC���˵ĬF��
�������әC�����Ǐ��º��ӵĹ��I�C���ˡ��������H�˜ʻ��M��( ISO) ���I�C�����g�Z�˜ʵĶ��x: / ���I�C������һ�N����;�ġ����؏;��̵��Ԅӿ��Ʋ����C������3 �������ɾ��̵��S�����ڹ��I�Ԅӻ��I��0�������m����ͬ����;���C�������һ���S�ęCе�ӿ�ͨ����һ���B�ӷ��m���ɽ��b��ͬ����Qĩ�ˈ����������әC���˾����ڹ��I�C����ĩ�S�ķ��m�b�Ӻ��Q��( ��) ���ģ�ʹ֮���M�к��ӣ��и��ᇊͿ�����әC�����ǙC���˼����е�����܊�����ڐ��ӵĭh�����B�m���������ṩ�����ĺ����|������������˹���Ч�ʶ��Ҝp�p�˹��˵Ąڄӏ��ȣ����������a�ɱ��͌����˲������g��Ҫ��
�����҇��ĺ��әC���ˌW�g�о��͑����ƏV�����_չ��s��20 ����Ěvʷ��ͬ�����ИI���M���M���g���^��һ�ӣ��҇��ĺ��әC�������^��һ�l�����M���������������Ƶ��^�̣�Ŀǰ�҇��ں��әC�����о��͑��÷����mȻ����һ����Ҏģ����ijЩ���������_���ˇ��H���Mˮƽ������Ȼ�������@���㡣
����Ŀǰ�����⺸�әC���˵ļ��g�о��F����Ҫ������3 ������:
����(1) �f�{���_���әC���˺�����O��Ŀ��ơ��@��ĺ��әC����ָ���Ǻ��әC����ϵ�y����վ��ͨ�������C���˱��w���C���˿��ƹ��C�ͽz�b�á�׃λ�C�͊A�ߵȲ�����
����( 2) �о����p��ۙ���g�����ں��ӭh�������صIJ�ͬ�����H���ӕr��܉�E�l��׃�ӡ�
����(3) ���漼�g���C���������ơ��OӋ��ԇ��^���У�������Ҫ�����\�ӌW�������W�����M�з����Լ��M��܉�EҎ���OӋ�����C�������Ƕ����ɶȡ����B�U���g�C�������\�ӌW�̈́����W���}ʮ�֏��s��Ӌ���y�Ⱥ�Ӌ�������ܴ��C����������挦���\��Ӌ��C�D�μ��g��CAD ���g�͙C���ˌW��Փ��Ӌ��C���γɎΈD�Σ����Ӯ��@ʾ��Ȼ�C���˵ęC���OӋ���\�ӌW����������������ۿ����Լ����H�����h���е��ϵK������ײ������T�����}�M��ģ�M���棬�@�ӾͿ��Ժܺõؽ�Q�аl�C�����^���г��F�Ć��}��
2���C���˿��w�Y���OӋ
�����҂����о������������ɶȺ��әC���ˣ��C������6 ���B�U��6 ���D���P���M�ɡ�����������ͺ����C�M�b���������S����ܛ��SolidWorks ����ɵġ��C���˽Y�����w�D��D1 ��ʾ�����C������������ۡ��粿���ⲿ��С�ۺ���������M�����C�������w�Ļ��D( �P��1) ���ɻ����Ȳ����b��늙C�ӣ���늙C���b�ڴ���c�������P���B��̎���Ӵ�������¸���( �P��2) ���C���˵����B�әC���˵Ĵ���cС�ۣ����ɰ��b����Ȳ��������С�������¸���( �P��3) ����Ť�D( �P��4) 늙Cֱ�Ӱ��b���ⲿ�У��Թ�ʡ���g������( �P��5) �����D( �P��6) ����늙C�����b��С�۵ăȲ���ͨ�^�����X݆����݆�ӌ��������f�o��
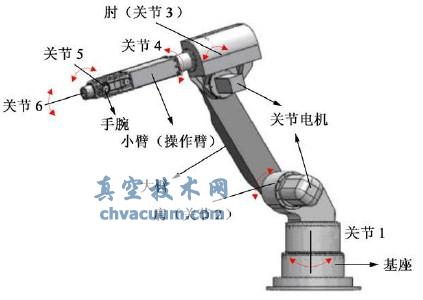
�D1 ���әC���˵ęCе�Y���c���ɶ�ʾ��D
5���Y���Z
����ͨ�^��CAD ܛ��SolidWorks �Ќ����ӹ��I�C���˵�̓�M�OӋ������ANSYS Workbench ���C���˵��P�I��λ( ���) �M������Ԫ������ֱ�^��չ�F�˴�۵đ����cλ�Ʒֲ����l�F�ڳ����OӋ�r���F�IJ��㣬�����Y�����ṩ�����OӋ�ķ���������ǰ������Ҋ��1��
��1 ����ǰ������

�����əC���˴�ۃ�����ľC����׃��֪����۵ľC����׃�����ֵ��0.1297 mm�������׃����0.0558mm��ͨ�^��ԃ�Cе�փ�֪45# 䓵������O����355MPa������������610MPa�������OӋҪ���ȿ�֪,������ķ���Y�����@Ҫ���ڃ���֮ǰ��