����SolidWorks���b�d�C�����b���OӋ������
�����������P�OӋҎ��������AutoCAD ܛ���_���b�d�C�����b�ø��U���L�ȼ����U���q���cλ�ã��\��SolidWorks ܛ�����������b�õ����Sģ�ͣ�����ģ��ӳ�䵽Cosmos motion ������M���\�Ӻ̈́����W�����о���ͨ�^�����������ķ������ɵ�֪���OӋ�b�d�C�����b�õ�����푑���r��ԓ�OӋ����������b�d�C���OӋЧ�ʺ��|����
1���b�d�C�����b�õ��OӋҪ��
�����b�d�C�����b�õ��OӋҪ��M���������ܣ�
����(1)�P���e��ƽ������
�����P���e��ƽ��������ָ�P���b�M�����ڄӱ۵��e���^���У����˱�������ɢ�䣬Ҫ���B�U�C��ʹ�P���ӽ�ƽ�ӡ����OӋ��Ҫ���P��������ˮƽ���D�ӽǶ�≤10°��
����(2)�P���Ԅӷ�ƽ����
�����P���Ԅӷ�ƽ������ָ�P�������λ��ж�d���P�������λ���·ŵ�����r���P������Ҫ���c�����غϡ�
����(3)��λж�d�Ƕȵ�Ҫ��
������λж�d�Ƕȵ�Ҫ����ָ�P�������λ��ж�d�r������ʹ��������ж�d���P�������cˮƽ��ĊA�Ǒ�≥45°��
�����������������⣬���ڹ����b�����ɗU�����ɵ��B�U�C�������˷�ֹ�U�����\���^���г��F���c�����i�F�����Ә���֮�g���ӽǑ�≥10°��2 ���U���L�ȼ��q���cλ�õĴ_��
�����b�d�C�Ĺ����b����Ҫ���P�����ӱۡ��u�ۡ��B�U�Լ��D���̈́ӱ��ȽM�ɡ������b�����I�^������4 �N���r�����빤�r���P�b���r�����λ�ù��r���λж�d���r���������b�d�C�Ĺ��������P�OӋҎ��Ҫ�_�����ж�d�߶ȡ���Сж�d���x��λж�d�ǵȡ�������AutoCAD �_�����U�����L�ȼ����U�����q���cλ��(Ҋ�D1)�����w���E�飺
����(1)���P�����������ԭ�c�� �_��XOY ����ϵ�����L���P�����S�D��;
����(2)�_���ӱ��c�C�ܵ��q���cA��G �c�ǹ����b���ڵ�λ���r(�����r����r��)�r�ӱۺ��P�����q���c��G′�c�ǹ����b���ڸ�λ���r(�����r��͢�)�r�ӱۺ��P�����q���c��G ��G′�cͬ����A�c��A�ģ��ӱ�AG �L��돽�ĈA���ϣ�����A �c����GG′�Ĵ�ֱƽ�־��ϡ�A �c�ĸ߶�Խ�ͣ����C�����ķ�����Խ��;
����(3)�B�U�c�P���͓u�۵�2 ���q���cF��E �Ĵ_����Ҫ���B�U�c�u�۵��q���cE ���ն���B�r�����cǰ���������҂��ӽDz���<10°�������ӽ�ȡ20°����С�x�ظ߶�ȡ350 mm �r�������D֪��1 270 mm<BE<1 300 mm��BE=1 280 mm��
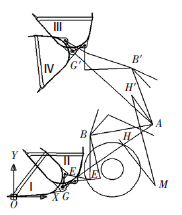
�D1 �b�d�C�����b�õ�4 ������λ��
��. ���빤�r��. �P�b���r��. ���λ�ù��r��. ��λж�d���r
5���Y�Z
����ͨ�^���b�d�C�����b�ø��U���ijߴ�_�������S��ģ�Լ��\�ӌW�̈́����W���������ݔ�����b�d�C�����b�õ��\��λ�ƺ�����������������Ч�ط����b�d�C�����b�õ�����푑���r��ͬ�r������Cе�OӋ�ṩ�˼��g���b������SolidWorks ܛ���M�ЮaƷ���OӋ�c���棬 ���F����I���s�ɱ����ӿ�aƷͶ���Ј��ٶȾ�����Ҫ�����x��