����LabVIEW�Ě��w�����y(c��)��̓�M�x�����_(k��i)�l(f��)
����
��������ռ��g(sh��)��(y��ng)����, ���w�����ɚ��w����Ӌ(j��)�y(c��)�������_�y(c��)�����w����(��©��) ����ʮ����Ҫ�����x������, ���˱����w��œ��(n��i)�ĉ����L(zh��ng)�ڹ�������,��Ҫ��(du��)œ�w�M(j��n)�Йz©, �z©�r(sh��)����Ҫ�ҵ�©��λ��, ߀Ҫ���_�y(c��)��С��©��, �@��(du��)���L(zh��ng)���ڿ��g�w�е��d���w���Ȟ���Ҫ; ���ȼ������ȼ���ױ����ж��Ě��w��Һ�w, С��й©���кܴ��Σ�U(xi��n)��, Ҫ��(du��)���ȼ�ϵļ�ע�^(gu��)�̺Ͱl(f��)��ꇵ��M(j��n)�а�ȫ�z�y(c��); ����ӹ��I(y��)�еİ댧(d��o)�wԪ���������·��Ӌ(j��)��C(j��)оƬ�����a(ch��n)��ˇ��,Ҫ�_���ƚ��w������ע��, �Ա��C��ˇ�|(zh��)���ͮa(ch��n)Ʒ���ܵķ�(w��n)�������˝M����������, ���Ɯy(c��)�����ȺͿɿ��Ը��ߡ��y(c��)�������������y(c��)������ֱ�^���Ԅ�(d��ng)���̶ȸߵĚ��w����Ӌ(j��)�Ƿdz���Ҫ�ġ�����̓�M�x�����g(sh��)��(g��u)���Ě��w�����y(c��)��̓�M�x��ϵ�y(t��ng)���Ǟ��ˌ�(sh��)�F(xi��n)����Ŀ��(bi��o)���M(j��n)�е��о�̽����
1����(sh��)�F(xi��n)���w�����y(c��)����̓�M�x��ϵ�y(t��ng)�Ľ���
1.1�����w�����Ĝy(c��)��ԭ��
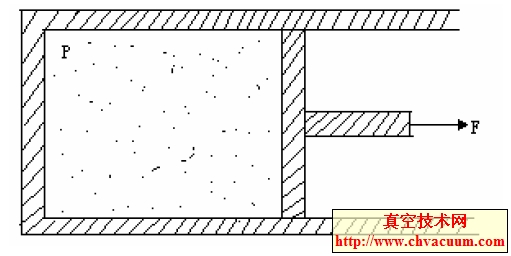
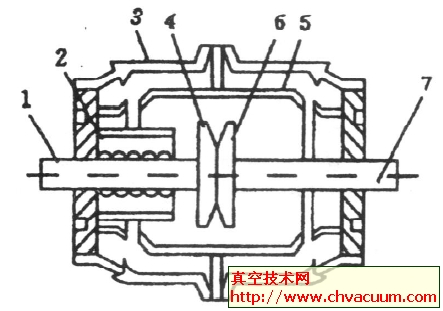
�������w�����Ĝy(c��)��ԭ����: ��(d��ng)���w������׃?n��i)��ҕr(sh��), �ŷ�늙C(j��)ͨ�^(gu��)ƽ��(d��ng)�C(j��)��(g��u)�(q��)��(d��ng)������������ˮƽ�\(y��n)��(d��ng), �����\(y��n)��(d��ng)��(hu��)��׃���������е��w�e, Һ���͵��w�e�ǻ�����׃��, �@�Ӳ��y�ܾ��ܵ��������ö��l(f��)����׃, ʹ���(n��i)�Ě��w�������ֺ㶨, ���w��Tr �ض�(Trһ��ȡ23��) �µ�����Q ͨ�^(gu��)�y(c��)��׃?n��i)��҃?n��i)���w�ĉ���p���ض�T ���w�e׃����dV/d t ���ɹ�ʽ(1) Ӌ(j��)��õ���
Q= [- d(PV)/dt] (Tr/T) = - P (dV/dt) (Tr/T)= - PA (dl/dt) (Tr/T) ��(dP/dt= 0) (1)
������ʽ(1) ��֪, �y(c��)�������r(sh��), ����Ҫ��(zh��n)�_�y(c��)����׃?n��i)��҃?n��i)���w�ĉ������w�e׃���ʺ͜ض�, ߀Ҫ�ڜy(c��)���^(gu��)���п���׃?n��i)��҃?n��i)���w�ĉ���, ʹ��㶨��
1.2��̓�M�x����Ӳ���Y(ji��)��(g��u)
��������“��ߜy(c��)�����Ⱥ��Ԅ�(d��ng)���̶�, �pС�y(c��)�����_����”��ԭ�t, �O(sh��)Ӌ(j��)��һ���Թ��ؙC(j��)�����ĵĜy(c��)���c����ϵ�y(t��ng), �x���˾����^�ߵĜy(c��)������, ���ö��K��(sh��)��(j��)�ɼ����Ѹ��y(c��)�������c��������(li��n)ϵ��һ��, ��(sh��)�F(xi��n)�˔�(sh��)��(j��)�Ԅ�(d��ng)�ɼ��ͺ㉺�Ԅ�(d��ng)�{(di��o)��(ji��)���ܡ�Ӳ�����w�Y(ji��)��(g��u)��D1 ��ʾ��
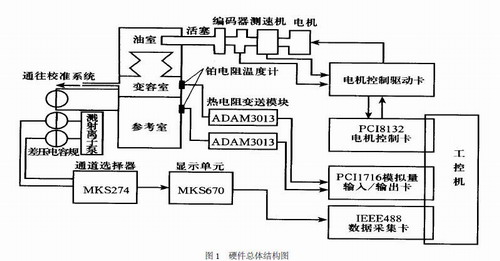
Ӳ������������:
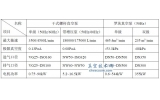
��������3 ��(g��)Pt100�K���ضȂ�������3��(g��)ADAM3013�����׃��ģ�K��1�KPCI21716��ܔ�(sh��)��(j��)�ɼ����Ɍ�(sh��)�F(xi��n)��(du��)׃?n��i)��ҡ������Ҽ��?sh��)�(y��n)�Ҝض�ͬ�r(sh��)�M(j��n)�вɼ����ضȵĜy(c��)��������0��100��, ���Ȟ�0.1�档��������(gu��)MKS ��˾���a(ch��n)��һ�ײʽ��ݱ�ĤҎ(gu��)(��������(g��)Ҏ(gu��)�^��һ��(g��)���Ɔ�ԪM S274 ��һ��(g��)��(sh��)��(j��)�@ʾ��ԪM KS670,MKS670 ����һ��(g��)488 �ӿ�, Ӌ(j��)��C(j��)ͨ�^(gu��)IEEE488 ��(sh��)��(j��)�ɼ����M(j��n)�����̺�Ҏ(gu��)�^�x��)������(gu��)NI��˾���a(ch��n)��IEEE488 ��(sh��)��(j��)�ɼ�����(sh��)�F(xi��n)���w�����Ĝy(c��)���������Ĝy(c��)��������0��1.01×105 Pa��
���������_(t��i)�����A��˾���a(ch��n)���\(y��n)��(d��ng)���ƿ�PC I28132���ŷ����ƿ���λ�ÿ��ƿ���ƽ��(d��ng)�C(j��)��(g��u)(��Ҫ�����x�ñ���늙C(j��)���S���a(ch��n)��70LC21 ������ʽֱ�����y(c��)�ٙC(j��)�M����̖(h��o)��HES210242MD �}�_���a�����z�ܡ�Á5 �Ļ���) �Ȍ�(sh��)�F(xi��n)��(du��)�ŷ�늙C(j��)�M(j��n)���ٶȺ�λ�ÿ���(�ŷ����ƽY(ji��)��(g��u)��(ji��n)�DҊ(ji��n)�D2)���z�܌�(d��o)��2 mm , ���Ȟ�0.001mm , ��λ�Ɯy(c��)���Ļ���(zh��n)��
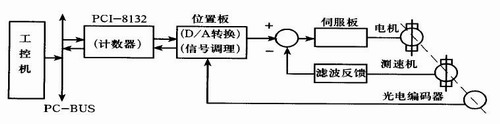
�����ٶȭh(hu��n)�ķ�����̖(h��o)ȡ�Ԝy(c��)�ٰl(f��)늙C(j��), �����h(hu��n)��(ji��)�м���V���Ǟ�V�����ٕr(sh��)���C����λ�íh(hu��n)��λ�Â���Ԫ��——��늾��a�����a(ch��n)������}�_�����oλ�ð彛(j��ng)��̖(h��o)�{(di��o)����oPC I28132 �еĜp��Ӌ(j��)��(sh��)��, ����ÿ��(l��i)һ��(g��)�}�_, Ӌ(j��)��(sh��)���͏�Ŀ��(bi��o)ֵ�pȥ1, ֱ��Ӌ(j��)��(sh��)���ă�(n��i)�ݞ�0, �ŷ�늙C(j��)�D(zhu��n)��Ŀ��(bi��o)λ�ö�ֹͣ���D(zhu��n)��