����BP�W�j����նȜy�����ȸ��Ʒ����о�
����ᘌ���նȜy�����ȵ͵ĬF����һ�N��նȜy�����ȸ��Ʒ������ԟ�żҎ���о�������BP �W�j�OӋ��նȜy��ϵ�y��ͨ�^�OӋBP �W�j�Y�����������N��ͬ���㷨���W�j��ֵ�M��Ӗ�����ԫ@�ñM���ܷ��������ȸ��ߵ�BP�W�j�������N�㷨�ɜyԇ�ӱ��M�Мyԇ�����N�㷨Ӗ���ľW�j���^��̶ȵ������նȜy�����ȣ��ܟ�z�������z����ɔ_Ӱ푴��pС�����������½��������ľW�jݔ��ֵ�����^���ӄ�������֮�����m���W�������{����������ݔ��ֵ������С��������С��0.01��
����Ŀǰ��՜y���ľ��Ⱥܵͣ�һ�������20%���`������՜y���ľ��Ⱥ��ٶ�һֱ����՜y���Pע����Ҫ���ݡ������՜y���ľ��Ⱥ��ٶȿ���ͨ�^���MҎ�ܽY�������Ӌ��̖�D�Q�·�ɷ���팍�F�����Ҏ�ܽY������՜y����Ӱ푺ܴ�,��ͬ�Ĝy���Y�������ڲ�ͬ�Ĝy��ԭ�������²�ͬ�Ĝy��Ч������Ҏ�ܽY���_���£���θ��M���Ӌ��̖�D�Q�·��Ӳ����ܛ�����P�I���������һ�N̎���㷨�܉������՜y���ľ��ȣ�ʹ��Ҏ�������ӟ�������ӻ��z����l��׃���r����ݔ���^���_����նȜy��ֵ��
1����՜y��ϵ�yԭ������D�OӋ
������ϵ�y�ԟ�żҎZJ-54D �錦���M�з�������żҎ����ԭ������: �ڟ�żҎ�y�������ȣ���նȵ�׃���H�c���w��������P������ڟ�z�ӟ������׃�r�����ż��ݔ��늄ӄ݃H�c��ն����P��������늄ӄ��c��ն�֮�g�����Pϵ�������������D���ٶ�Ҏ�ܵ����������ʴ_�ɿ����Ҳ����]��������̿���ۉm��մ��Ӱ푡�
�������H�����У���z��ݔ��������a�����ӣ��Ķ�ƫ�x�˶������Ӱ푟�żҎ��ݔ��늄ӄݡ�ͬ�r�����ڭh���ضȵ�׃��������z������ֵ�l������׃����Ҳ����늄ӄݴ�С�a������Ӱ푡����ڽ���ɔ_�Ĵ��ڣ���K����늄ӄ��c����֮�g���Pϵƫ�xҎ�������������Ķ����͟�żҎ�Ĝy�����ȡ�����նȜy��ϵ�y�Ԇ�Ҏ�ܞ錦���漰Ҏ�ܵ���ɢ�Է�����
��������������z����IJ��Ӽ���z�����׃������նȜy����Ӱ푣����ӟ��������z����͟�늄ӄ���̖������Ϣ̎���W�j���W�jݔ���3 ����̖������U3 �鱻�y��늄ӄݵ�늉�ݔ����̖��U1��U2 ��2����Ŀ�˅����ęz�y��̖���W�jݔ���ij�ʼ��늄ӄݞ�Ec��������늄ӄݺ͉���֮�g����������������y������ݔ����Ec�鱻�y��늄ӄݵĆ�ֵ����,�@�ӿ��������ӟ�����͟�z����2 ����Ŀ������Ӱ�; �����ڼӟ����׃���͟�z���貨�ӵ���r�£���ʹϵ�yݔ��Ec�������Sƫ��ƽ����yĿ����E���Ķ����Fϵ�yĿ�����y�����ȵ���ߡ�
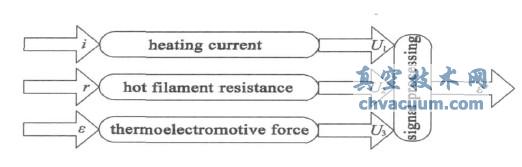
�D1 ��նȜy��ϵ�y��D
2����նȜy��ϵ�yBP�W�j�OӋ
����2.1��BP�W�j�Y���OӋ
���������W�j�����y��Ϣ�M�з���̎����������ߜy�����ȡ����A�y늄ӄݵĽǶȳ��l�����ȴ_���W�j�Ļ����Y�������IJ���3 ��BP �W�j�Խ����ڲ�ͬ�ӟ�����͟�z����l���µ�늄ӄ��A�yģ�ͣ����_����ߜy�����ȵ�Ч����ݔ��ӹ��c����ݔ����̖�Ă����_�����ӟ��������z���衢��늄ӄݣ��tݔ��ӹ��c��n = 3�����g�Ӟ��[���c�ӣ�ݔ���Ӟ��A�yݔ����늄ӄݣ��tݔ���ӹ��c��m= 1������նȜy��ϵ�yBP �W�j�����Y����D2 ��ʾ��
�����[���ӹ��c�����x�����˹��W�j����P�I�IJ��E�����IJ���ԇ�����_������[���c����ԇ�����Ǵ_������[�������õķ���������ԇ�����r��ͨ�^���½�ʽ�_���[���c��
![]()
����ʽ�У�k ���[�ӹ��c����n ��ݔ��ӹ��c����m ��ݔ���ӹ��c����A��1~ 10 ֮�g�ij�����������ʽ�����O���^�ٵ��[���cӖ���W�j,Ȼ����u�����[���c��������ͬһ�ӱ������M��Ӗ�������ھW�j������ͬ�Ęӱ����в�ͬ���`��Զ���Ӗ���ӱ��������Emax�����W�j�Ŀ��`��E ,Ҳ��������`���
��������W�j�Ŀ��`��Ķ��_���W�j���`����С�r�������[���c�����[�ӡ�ݔ���ӵ���Ԫ�D�ƺ�������Sigmoid �������ɱ�����Ԫ��ݔ���M��͠�B��

�D2 BP �W�j�����Y���D
�YՓ
����ᘌ���նȜy�����Ȳ��ߵĆ��}�����Ļ���BP�W�j�OӋ����նȜy����������Ϣ̎��������ͨ�^�OӋBP �W�j�Y�����Ɍ��y�ӱ������������N�㷨���W�j��ֵ�M��Ӗ�����ԫ@�÷��������ȸ��ߵ���նȜy��BP �W�j���ɜyԇ�����z���N�㷨Ӗ���ľW�j�^ԭ�y�������ľ��ȴ����ߣ��ܼӟ�����͟�z����ֵ׃����Ӱ푴��p��; ͬ�r�����m���W�������{���������ӄ����������Ĝy��ݔ�������������^�����½���С�����������m���W�������{���������Ĝy��ݔ��������������С��С��0.01���@������һ���߾������Ӌ�_�l�ṩ�����ļ��g֧�Ρ�