╗∙ė┌Pro/E║═ADAMSĄ─┼ŻŅ^┼┘┤▓ī¦ŚUÖCśŗĘ┬šµĘų╬÷
ĪĪĪĪĻU╩÷┴╦┼ŻŅ^┼┘┤▓ī¦ŚUÖCśŗį┌Pro /E ŁhŠ│ųąĮ©─Ż║═ADAMS ŁhŠ│ųą▀\äėĘ┬šµ▀^│╠ĪŻ═©▀^ī”ÖCśŗųą╗¼šĒĄ─╦┘Č╚║═╝ė╦┘Č╚Ū·ŠĆĘų╬÷Ż¼šf├„┴╦╗¼šĒį┌╣żū„ļAČ╬▀\ąąŲĮĘĆŻ¼ĘĄ╗žļAČ╬╦┘Č╚▌^┐ņĪŻĘų╬÷┴╦ī¦ŚUĄ─ö[ĮŪŪ·ŠĆŻ¼ėŗ╦Ń┴╦ÖCśŗĄ─ąą│╠╦┘▒╚ŽĄöĄŻ¼šf├„┴╦ÖCśŗ┤µį┌╝▒╗ž╠žąįĪŻ┴Ē═ŌĘų╬÷┴╦“īäėĄ─ŲĮ║Ō┴”Šž║═╣”┬╩Ū·ŠĆŻ¼ĮY╣¹▒Ē├„Ż¼ė╔ė┌ĘĄ╗žļAČ╬╦┘Č╚▌^┐ņŻ¼╦∙ąĶĄ─“īäė┴”Šž╝░╣”┬╩Ą─ōp║─ŽÓæ¬į÷╝ėŻ¼▀\äėģóöĄĘ¹║Ž┼┘┤▓Ą─╣żū„╠ž³cŻ¼ÖCśŗįOėŗ║Ž└ĒĪŻ
ĪĪĪĪĮ³─ĻüĒŻ¼╠ōöMśėÖC╝╝ągį┌ć°ā╚═ŌĄ├ĄĮ┴╦┐ņ╦┘░lš╣Ż¼═©▀^Į©┴ó╠ōöMśėÖCŻ¼─▄ē“─ŻöM«aŲĘį┌šµīŹŁhŠ│Ž┬Ą─Ė„ĘN▀\äėīW║═äė┴”īW╠žąįŻ¼▓óĖ∙ō■Ę┬šµĮY╣¹ā×╗»«aŲĘĄ─įOėŗĘĮ░ĖŻ¼▒▄├Ō┴╦é„ĮyįOėŗųą╬’└ĒśėÖCĄ─Ę┤Å═ųŲįņĪóą▐Ė─▀^│╠Ż¼┤¾┤¾┐sČ╠┴╦ķ_░lų▄Ų┌Ż¼ĮĄĄ═┴╦čą░l│╔▒ŠŻ¼╠ßĖ▀┴╦├µŽ“┐═æ¶┼c╩ął÷ąĶŪ¾Ą──▄┴”ĪŻ
ĪĪĪĪ└¹ė├╠ōöMśėÖC▀MąąĘ┬šµįOėŗŻ¼╦∙╔µ╝░Ą─ŅIė“▒╚▌^ÅVŻ¼┐╔ęįų¦│ųęį▒ŻūC║═╠ßĖ▀«aŲĘąį─▄×ķų„ų╝Ą─Ė„ĘN╣ż│╠Ęų╬÷Ż¼ų¦│ų▓╗═¼ŅIė“Ą─╚╦åT═¼Ģrī”═¼ę╗éĆ╠ōöMśėÖC▀Mąą£yįćĪóĘų╬÷Ż¼Å─Č°īóįSČÓØōį┌Ą─«aŲĘįOėŗļ[╗╝║═╚▒Ž▌Ž¹£ńį┌įOėŗ│§Ų┌ļAČ╬Ż¼ę“Č°┐╔ęį┤¾Ę∙Č╚╠ßĖ▀«aŲĘĄ─┘|┴┐ĪŻ
ĪĪĪĪ▒Š╬─▓╔ė├Pro/E ī”─│┼ŻŅ^┼┘┤▓ī¦ŚUÖCśŗ▀Mąą┴╦╚²ŠSCADĮ©─ŻŻ¼▓óī¦╚ļĄĮ╠ōöMśėÖCĘų╬÷▄ø╝■ADAMSųąŻ¼▀Mąą▀\äėīWĘ┬šµĘų╬÷ĪŻ
1Īó╗∙ė┌Pro/E Ą─CAD Į©─Ż
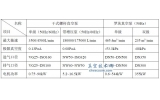
ĪĪĪĪADAMS ▒Š╔ĒŠ▀ėąę╗Č©Ą─╚²ŠSCAD Į©─Ż─▄┴”Ż¼Ą½ī”ė┌┼ŻŅ^┼┘┤▓ī¦ŚUÖCśŗ▀@śėŠ▀ėąÅ═ļs═Ōą╬┼cśŗįņĄ─ÖCąĄüĒšfŻ¼ätĮ©─Ż─▄┴”ėąŽ▐Ūę▀^│╠▒╚▌^Å═ļsŻ¼ę“┤╦ąĶę¬ė╔Pro /E Ą─īŻśICAD ▄ø╝■ģfų·Į©─ŻĪŻī”ė┌ī¦ŚUÖCśŗ╠ōöMśėÖCĄ─CAD Į©─ŻŻ¼ų„ę¬╩Ū└¹ė├Pro /E ųąĄ─└Ł╔ņĪóą²▐DĪóÆ▀├ĶĄ╚▓┘ū„Į©┴ó┴Ń▓┐╝■╚²ŠSīŹ¾w─Żą═Ż¼┴”Ū¾ą╬ĀŅłA╗¼├└ė^▒ŲšµĪŻ═¼Ģr┐╝æ]ĄĮĘ┬šµčąŠ┐Ą─ąĶ꬯¼ī”▓╗╩Ū╠žäeųžę¬Ą─łDą╬Ż¼ät▒M┴┐║å╗»Ż¼╚ń╚ĪŽ¹▀^Č╔łAĮŪĄ╚ĘŪĻPµIąįą┼ŽóŻ¼═Ļ│╔┴╦╗¼šĒĪó╗¼ēKĪóī¦ŚU╝░²X▌åĄ╚Ė„┴Ń╝■Ą─Į©─ŻĪŻ
ĪĪĪĪÖCśŗé„äė▀^│╠ė╔ą▒²X▌å▐DäėĦäėōuŚUū„═∙Å═ö[äėŻ¼ī¦ŚUĦäė╗¼šĒū„═∙Å═ų▒ŠĆ▀\äėĪŻčb┼õ═Ļ│╔Ą─╠ōöMśėÖCæ¬įōėąę╗éĆūįė╔Č╚Ż¼╦∙ęįį┌čb┼õĢræ¬Ė∙ō■▀\äėą╬╩Į▀xō±“▀BĮė”╝s╩°ĘĮ╩ĮŻ¼╚ńõNßöĪółAų∙ĪóŪ“Īó╗¼äėŚUĄ╚ĪŻ▒Š┤╬čb┼õ▓╔ė├┴╦2 éĆ▐DäėĖ▒Īó1 éĆęŲäėĖ▒║═1 éĆłAų∙Ė▒Ż¼Š▀¾wčb┼õĘĮĘ©×ķ: ╗¼šĒ║═ōuŚUĪóĘĮ╗¼ēK║═ą▒²X▌åų«ķgĄ─ŽÓī”▀\äėĖ▒×ķ▐DäėĖ▒Ż¼┐╔ęį▀xō±õNßö( pin) ▀BĮė╝s╩°ĘĮ╩Į; ĘĮ╗¼ēK║═ōuŚUų«ķgĄ─ŽÓī”▀\äėĖ▒×ķęŲäėĖ▒Ż¼┐╔ęį▀xō±╗¼äėŚU( slider)▀BĮė╝s╩°ĘĮ╩Į; łA╗¼ēK║═ōuŚUų«ķgĄ─ŽÓī”▀\äėĖ▒×ķłAų∙Ė▒Ż¼┐╔ęį▀xō±łAų∙( cylinder) ▀BĮė╝s╩°ĘĮ╩Į; Ųõ╦¹▌oų·┴Ń╝■▓╔ė├äéąį▀BĮėųąĄ─“Ųź┼õ”║═“ī”²R”╝s╩°ĪŻ▀@śėŠ═│╔╣”čb┼õ═Ļ│╔┴╦ī¦ŚUÖCśŗĄ─CAD─Żą═Ż¼╚ńłD1 ╦∙╩ŠĪŻ
ĪĪĪĪ└¹ė├Pro /E Ė╔╔µĘų╬÷╣”─▄▀MąąĖ╔╔µÖz▓ķŻ¼▒▄├Ō┴╦įō─Żą═ī¦╚ļADAMS║¾ę“ÖCśŗ│÷¼Få¢Ņ}Č°▒žĒÜĘĄ╗žPro /E ŁhŠ│ųžą┬ą▐Ė─Ą─ųžÅ═╣żū„ĪŻ
2ĪóĮ©┴ó╠ōöMśėÖC
ĪĪĪĪė╔ė┌Pro /E ┼cADAMS ╩ŪĘųī┘2 ╝ę▓╗═¼╣½╦Šķ_░lĄ─▄ø╝■ŲĮ┼_Ż¼Å─╣”─▄ęį╝░│╠ą“ā╚║╦Ą╚ČÓĘĮ├µüĒ┐┤Ż¼Ė„ūįĄ─öĄō■Č╝║▄ļy×ķī”ĘĮūRäeĪŻę¬īóPro /EĖ±╩ĮĄ─╚²ŠSīŹ¾w─Żą═ī¦╚ļADAMS ŁhŠ│ųąŻ¼▒žĒÜ└¹ė├Pro /E ║═ADAMS Ą─Įė┐┌▄ø╝■Mechanism/Pro2005Ż¼▓╔ė├¤o┐p▀BĮėĄ─ĘĮ╩ĮŻ¼ė├æ¶▓╗▒ž═╦│÷Pro /E æ¬ė├ŁhŠ│Ż¼╝┤┐╔īóī¦ŚUÖCśŗčb┼õ¾wųąĄ─┴Ń╝■Č©┴x×ķäé¾wŻ¼╠Ē╝ėę╗ą®║åå╬Ą─╝s╩°║¾Ż¼īó─Żą═ī¦╚ļĄĮADAMS ŁhŠ│ųąĪŻųžą┬Č©┴xĖ„┴Ń╝■Ą─▓─┴Žī┘ąįĄ╚Ż¼▄ø╝■Ģ■ūįäėėŗ╦Ń┘|ą─Īó▐DäėæT┴┐Ą╚┘|┴┐ą┼ŽóŻ¼┤╦═Ō▀Ćę¬▀Mąą╚ńŽ┬─Żą══Ļ╔Ų╣żū„:
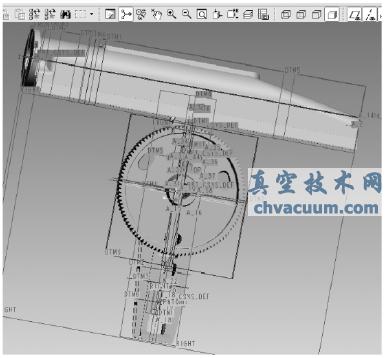
łD1 ī¦ŚUÖCśŗĄ─CAD ─Żą═
ĪĪĪĪa. ×ķ▒ŻūCÖCśŗ▀\äėĄ─£╩┤_Ż¼╚ĪŽ¹įŁŽ╚įOČ©Ą─╝s╩°ĪŻ
ĪĪĪĪb. ę└ō■ÖCśŗ▀\äėĻPŽĄŻ¼į┌śŗ╝■ų«ķgųžą┬╠Ē╝ė╝s╩°Ż¼įŁäė╝■╠Ē╝ė“īäėĪŻ
ĪĪĪĪc. ╩╣ė├─Żą═“×ūC╣żŠ▀Öz▓ķÕeš`Ż¼░³└©▓╗ŪĪ«öĄ─▀BĮė║═╝s╩°Īóø]ėą╝s╩°Ą─śŗ╝■ĪóśėÖCĄ─ūįė╔Č╚Ą╚ā╚╚▌ĪŻ
ĪĪĪĪ═©▀^╔Ž╩÷▓┘ū„ī”─Żą═▀Mąą▀Mę╗▓ĮĄ─═Ļ╔ŲŻ¼Į©┴ó┴╦ī¦ŚUÖCśŗĄ─╠ōöMśėÖC─Żą═( ╚ńłD2 ╦∙╩Š) ĪŻ

łD2 ī¦ŚUÖCśŗ╠ōöMśėÖC─Żą═
4ĪóĮY╩°šZ
ĪĪĪĪ▒Š╬─═©▀^ī”ī¦ŚUÖCśŗųą╗¼šĒĄ─▀\äėŪ·ŠĆĘų╬÷Ż¼šf├„┴╦į┌╣żū„ļAČ╬╗¼šĒĄ─╦┘Č╚ųĄūā╗»ŲĮŠÅŻ¼╝ė╦┘Č╚▌^ąĪŻ¼╦∙ąĶĄ─“īäė┴”Šž║═╣”┬╩ōp║─╗∙▒Š║ŃČ©ĪŻČ°ĘĄ╗žļAČ╬ätŽÓĘ┤Ż¼╦┘Č╚ūā╗»äĪ┴ęŪę╦∙ąĶ“īäė┴”Šž║═╣”┬╩ōp║─┤¾Ę∙į÷╝ėĪŻĖ∙ō■╦∙£y┴┐ī¦ŚUö[ĮŪĄ─ūŅ┤¾ųĄŻ¼┐╔ėŗ╦Ń│÷ÖCśŗĄ─ąą│╠╦┘▒╚ŽĄöĄ┤¾ė┌1Ż¼ūC├„ÖCśŗ┤µį┌╝▒╗ž╠žąįŻ¼ÖCśŗĘ┬šµĄ─ĮY╣¹┼c┼ŻŅ^┼┘┤▓Ą─ŪąŽ„╠ž³cŽÓĘ¹║ŽŻ¼▒Š┤╬įOėŗŠ▀ėą▌^║├Ą─┐╔┐┐ąį└¹ė├╠ōöMśėÖC╝╝ągī”ÖCśŗĄ─▀\äė▀MąąĘ┬šµ▓óĘų╬÷ŽÓĻPģóöĄŻ¼¤oąĶųŲįņ╬’└ĒśėÖC╝┤┐╔“×ūC«aŲĘįOėŗĄ─š²┤_ąįŻ¼Å─Č°┤¾┤¾┐sČ╠┴╦įOėŗų▄Ų┌ĪŻ┴Ē═ŌŻ¼▀Ć┐╔Ė∙ō■▓╗═¼Ą─╣żū„ę¬Ū¾▀Mę╗▓Įī”ÖCśŗ▀MąąĖ─▀MįOėŗŻ¼═Ų▀M═¼ŅÉ«aŲĘĄ──ŻēK╗»║═ŽĄ┴ą╗»ĪŻ