����Pro/E�\�ӷ���Č��Aʽϴƿ�C(j��)�A�֙C(j��)��(g��u)���O(sh��)Ӌ�c�о�
����ᘌ����Aʽϴƿ�C(j��)�Ĺ���Ҫ�����һ�Nᘌ��A�֙C(j��)��(g��u)�ĸ��M(j��n)�������������c�U���ˌ��Aʽϴƿ�C(j��)�ĽY(ji��)��(g��u)ԭ�������Ќ��A�ֲ�������˸��M(j��n)�����\��Pro/E�M(j��n)�����\�ӷ��棬��C���\�Еr���C(j��)��(g��u)֮�g���g϶�͊A��Ч�������ڷ��慢��(sh��)���\��Ч���������錦�Aʽϴƿ�C(j��)�O(sh��)Ӌ������
��������
�����S��ƿ�bʳƷ�Ŀ��ٰl(f��)չ����ϴƿ-���һ�w�C(j��)�������������ӣ�����һЩ���M(j��n)���ҵ�ϴƿ-���һ�w�C(j��)�ѽ�(j��ng)�_(d��)����(sh��)�fƿ/h�����a(ch��n)�ٶȡ��҇���Ҋ��ϴƿ�C(j��)Ʒ�N��Ҏ(gu��)�Y(ji��)��(g��u)�^�࣬�͝�ʽϴƿ�C(j��)���ԣ����^���͵����D(zhu��n)��ʽ���?zh��n)��Ԅ�ϴƿ�C(j��)���o�?zh��n)��Ԅ�ϴƿ�C(j��)���ܱPʽϴƿ�C(j��)�������D(zhu��n)ʽϴƿ�C(j��)�ȣ��@Щϴƿ�C(j��)��������ƿ�C(j��)��(g��u)��ƿ����ݔ���^������Ҫƿ��ƿ�ڊA��һ��ƿ��ƿ�ڊAֻ�܌�һ�Nƿ���M(j��n)����ϴ�����a(ch��n)�����ͣ���;�ďV�����ܵ����ơ�ȫ�Ԅӌ��Aʽϴƿ�C(j��)�Y(ji��)��(g��u)�o�����\�з�(w��n)�����ɿ����m���ڲ�ͬƿ�����߶ȵIJ���ƿ������ƿ�������ȹ��b������(n��i)��_ϴ���ҟo횸��Q�κ��������;�V�����\���ٶȿ����_(d��)��30000ƿ/h���M������ϡ��{(di��o)ζƷ���a(ch��n)��I(y��)����N���bҎ(gu��)��ͬ�C(j��)��ϴ�������Ҫ����һ�N��ܡ�һ�w�����Ԅӻ��C(j��)е��
1�����Aʽϴƿ�C(j��)�ĽM�ɼ�����
������D1��ʾ�����Aʽϴƿ�C(j��)��Ҫ�ɊA�w���A�w�{(di��o)��(ji��)�C(j��)��(g��u)����(d��o)��݆��ݔ����ϴ�L(f��ng)�əC(j��)��(g��u)���C(j��)�ܡ��������6���ֽM�ɡ�
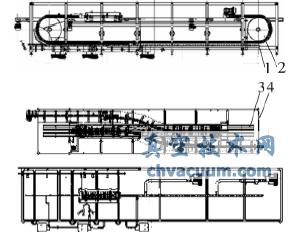
�D1 ���Aʽϴƿ�C(j��)ʾ��D
1-ݔ���L(f��ng)�ɲ� 2-��(d��o)��݆ 3-�A�w�{(di��o)��(ji��)�� 4-�C(j��)��
����1.1���A�w
�����A�w��Ҫ�ɲ��P䓷��ܺ��ӽM�ɡ��M(j��n)���A�w���ֲ������ȿ���ʽ��ʹƿ���M(j��n)���A�w���������(w��n)�������a(ch��n)���Dƿ��ײƿ����ƿ�F(xi��n)��
����1.2����(d��o)��݆
������D2��ʾ����(d��o)��݆��Ҫ���C�Aƿ�������������ʹƿ��������ã��M(j��n)������ĸ������Ρ���(d��o)��݆�мӷ��o(h��)���γɷ��]����ֹƿ�ӵ���r���ڌ�(d��o)��݆��λ������(d��o)�¿�ס��(d��o)��݆��p��朗l�ĬF(xi��n)��l(f��)����
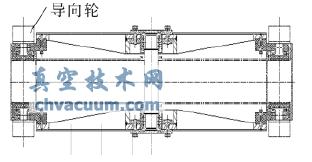
�D2 ��(d��o)��݆ʾ��D
����1.3���A�w�{(di��o)��(ji��)�C(j��)��(g��u)
������D3��ʾ���A�w�{(di��o)��(ji��)�C(j��)��(g��u)��Ҫ��ɊA�w���{(di��o)��(ji��)���ܡ�ͨ�^���g����݆�펧���ݗUʹ���ҊA�w������(d��o)�U���\�ӣ��Ķ��{(di��o)��(ji��)�A�w�g��͊A�o����
����1.4��ݔ����ϴ��əC(j��)��(g��u)
������Ҫ��������:(1)�ڲ��P�ƽ��D(zhu��n)���ݔ��ƿ�����g�����ƿ��_ϴ����;(2)�ڊAƿ�ݔ��ƿ�����g�����ƿ��(n��i)ǻ��ϴ���﹤��;(3)ݔ��會�߅�����p�ӿ��{(di��o)ʽ�o(h��)�ڣ��M(j��n)�иߵ��{(di��o)��(ji��)�͌��ȵ��{(di��o)��(ji��)���m��(y��ng)��ͬƿ�͵�ݔ��Ҫ��ƿ����ϴ���Ì��Q���ܷ�ʽ��ƿ��(n��i)ǻ��ϴ����������ˮ��ϴ�Ρ���ˮ��ϴ�Ρ��߉��L(f��ng)���ɶΡ����ɶνM�ɡ������L(f��ng)�ɹܵ��ߵͿ��{(di��o)�����m��(y��ng)��ͬ��ƿ�ߡ������bȫ��ˮϵ�y(t��ng)��ʹ���ܕr�R����ˮ�y(t��ng)һ������ָ��ˮ�ۣ�Ȼ�������ߡ���əC(j��)��(g��u)���ß��L(f��ng)������ƿ�M(j��n)�и��
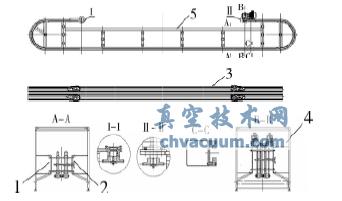
�D3 ���Aʽϴƿ�C(j��)�ĊA��ϵ�y(t��ng)ʾ��D
1-�{(di��o)��(ji��)��ĸ 2-��݆ 3-�A�w 4-�A�w�{(di��o)��(ji��)�b�� 5-���P䓷���
����1.5���C(j��)��
�����C(j��)�����w��ȫ���P䓷��ܺ��Ӷ��ɣ��²�ˮ�۲��ü����a(b��)ˮ�ܵ��ͼ�����ˮ�ܵ���߀��ÿ��ˮ�����O(sh��)���в�����Ƭ�����ڣ�ͬ�r�ڳ��A�w̎��©���Ό�(d��o)��ۣ�ƿ�ӵ���r��������(d��o)���ռ��@��ˮ���У���ֹ��ס��(d��o)��݆���D(zhu��n)�ӡ�ÿ�����P(gu��n)��λˮ���û���Bͨ������ˮλһ�¡�
5���Y(ji��)Փ
�����A�w�{(di��o)��(ji��)�C(j��)��(g��u)��(j��ng)�^���M(j��n)��ƿ�i�A�w�{(di��o)��(ji��)�C(j��)��(g��u)���F(xi��n)���ԄӊA�oƿ�ӣ�����Ҫ�M(j��n)�ЊA�w�\�ӡ������p�����˹�����������˹���Ч�ʣ����ҊA�o�����{(di��o)��(ji��)���������˽�(j��ng)���ԵĿ���׃?y��u)������Ԅӻ��O(sh��)�侫�_�Ŀ��ơ�ͬ�r�����M(j��n)��ęC(j��)��(g��u)�������˹���������݆�������ڊA�o�����_����С����ƿ����ϴ������늙C(j��)���ŷ��Ƅ��������ϵĕr��ʹ�á�
������(j��ng)���H�\�Мyԇ�������O(sh��)Ӌ���Aʽϴƿ�C(j��)��ƿ�i50��80mm��ƿ��70��140mm�����a(ch��n)������350ƿ/min�ėl���£�ϴƿ�C(j��)��ݔ����\�Ӻ͊Aƿ��\���ڿ���ϵ�y(t��ng)�Ŀ������F(xi��n)��f(xi��)�{(di��o)���\������