����Ԫܛ�������늻��t�Q�ؙC(j��)��(g��u)�Y(ji��)��(g��u)�����еđ�(y��ng)��
�����������аl(f��)VCFW- 8T ����Ժ�늘O늻��t�^���У�������ܷ�����VCFW- 3T 늻��t�Q�ؙC(j��)��(g��u)�Ć��}��ᘌ�(du��)�ˆ��}����������Algor ܛ����(du��)VCFW- 3T �Q�ؙC(j��)��(g��u)�M(j��n)�Џ�(qi��ng)�ȷ������هLԇ���Ĺ��r�l�����������ܷ�M��VCFW- 8T �Č�(sh��)�Hʹ��Ҫ���M(j��n)��ϵ�л���(y��ng)�á�����֮��߀̽��Algor ����ՠt��(y��u)���O(sh��)Ӌ(j��)�еđ�(y��ng)��Ч����
�������늻��t����ӷQ�ؙC(j��)��(g��u)(���º��Q�Q�ؙC(j��)��(g��u))��ȫ�Ԅ�(d��ng)�ĺ����ٿ������늻��t���P(gu��n)�I���ęC(j��)��(g��u)���O(sh��)������ԓ�C(j��)��(g��u)��(sh��)�r(sh��)�z�y(c��)��늘Oϵ�y(t��ng)����׃���^�̅���(sh��)���������]�h(hu��n)�^�̿��Ƶ�ݔ�뷴����̖(h��o)��ͨ�^�c�A(y��)�ȶ����O(sh��)Ӌ(j��)�ľ��̅���(sh��)�ı��^Ӌ(j��)�㣬��(sh��)�F(xi��n)�������������۟�������?sh��)ȹ�ˇ�^�̵�ȫ�Ԅ�(d��ng)���ơ�Algor ��һ�����ͨ������Ԫܛ�������Է���Č�(d��o)����N��ʽ�����Sģ���ļ�������������Ԫ�W(w��ng)���M(j��n)�ж�N��͵ķ�����ͬ�r(sh��)Algor �ķǾ��Է���������߀�ṩ�C(j��)е�\(y��n)��(d��ng)���湦�ܣ����Է����ڙC(j��)��(g��u)�\(y��n)��(d��ng)�^���е���������r��
1����������
�����������аl(f��)VCFW- 8T ����Ժ�늘O늻��t�(xi��ng)Ŀ�r(sh��)������Q�ؙC(j��)��(g��u)�O(sh��)Ӌ(j��)�^���У����]���a(ch��n)Ʒ��(bi��o)��(zh��n)����ϵ�л����}��������ܷ������Ѷ��ͳ����VCFW- 3T 늻��t�Q�ؙC(j��)��(g��u)�ļ��O(sh��)����(du��)��3 t늻��t�Q�ؙC(j��)��(g��u)�ķ�����Ҫ�����(y��n)�C���O(sh��)Ӌ(j��)�ܷ�M��VCFW- 8T(���º��Q8 t 늻��t)�Ĺ��r�l��������8 t 늻��t���r�l���µó���K�Y(ji��)Փ��
����������VCFW- 3T 늻��t�Q�ؙC(j��)��(g��u)�O(sh��)Ӌ(j��)�^������Ҫ�Ԃ��y(t��ng)���˹�Ӌ(j��)���c��(j��ng)�(y��n)�O(sh��)Ӌ(j��)������ͬ�r(sh��)���˱��ں��m(x��)ϵ�л���(y��ng)�ã����O(sh��)Ӌ(j��)�^���������^��ĸ������������ռ��g(sh��)�W(w��ng)(http://shengya888.com/)�ı��IJ�����ˌ�3 t 늻��t�ķQ�ؙC(j��)��(g��u)��(y��ng)�õ�8 t 늻��t�Ŀ����Ԇ��}��
2�����}����
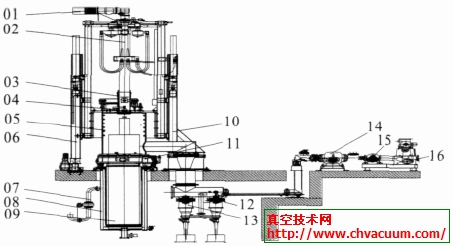
������D1 ��ʾ�Q�ؙC(j��)��(g��u)�Ļ���ԭ�����Ը����飬����Ϸ��ăɂ�(g��)���(d��ng)֧����늘Oϵ�y(t��ng)���е��������f���{(di��o)�����ϣ������{(di��o)�������������f������(g��)�����������ϡ�����(g��)�C(j��)��(g��u)��ƸܗUԭ�팢����Ч���䡣�C(j��)��(g��u)�Ă��в��ּ����Ʋ��ֵ����P(gu��n)ԭ�������ڱ��ķ�����ӑՓ��(n��i)�ݣ����ڴ˲�٘����
�D1 �Q�ؙC(j��)��(g��u)ʾ��D
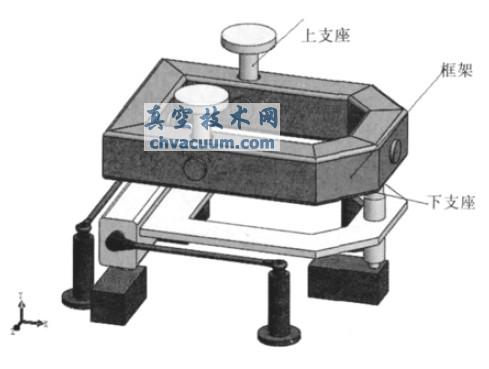
�����C�ϣ��҂����Ѵ˙C(j��)��(g��u)�������ܼ������Ă�(g��)֧���������}(�¿�ܿɺ�����������W(xu��)���}������֪׃��С�����ڿ��]֮��(n��i))����D2 ��ʾ����ô�ˆ��}�ĽY(ji��)��(g��u)�������Ϳ��Ե�ͬ�ڷ����˿�ܼ���������������r�µ�׃�μ�ʧЧ���}��
�D2 �������ģ��
�����Ŀ�ܽY(ji��)��(g��u)��֪���Ă�(g��)֧������ͨ�^�N�S�������f����ܵģ�����(g��)������������ã���ܵĺ��p���_�E�A��̎���ڎ��Π�ͻ׃��(d��o)��(y��ng)�����У�����ʧЧ;�N�S�ܼ��������ã��N�S�c����B�Ӳ�λ���ܳ��F(xi��n)�ɼ��Б�(y��ng)������ʧЧ���������������ɵó����ܮa(ch��n)��ʧЧ��ԭ��w�{���£�
����(1) �N�S�ܼ�����������ʧЧ;
����(2) ��ܽ��纸�p̎����(y��ng)�����Юa(ch��n)���Ɖ�;
����(3) ������°��_�E�A��̎����(y��ng)�����Юa(ch��n)���Ɖ�;
���������҂�?c��)ڷ����^�̌���һ��(g��)�������c��ɂ�(g��)���_�M(j��n)�з��������քe��(du��)ģ���M(j��n)���m��(d��ng)?sh��)ĺ���̎���?/p>
3���N�S���ַ���
3.1��ǰ̎�������
�����ķQ�ؙC(j��)��(g��u)�ęC(j��)е����ԭ����֪��ÿ����ϲ��ă���֧���c�²���֧��������rһ�£�ÿ��(g��)֧��������(g��)�Q�ؙC(j��)��(g��u)������һ�룬�҂�?c��)��O(sh��)��߅��l���r(sh��)�����L�ڽ�(j��ng)�(y��n)�����¼��O(sh��)��
����(1) 3 t 늻��t���d�ڷQ�ؙC(j��)��(g��u)�ϵ����������r�²�����6 t (�����Ժ�늘O��늘O�U����������)��
����(2) 8 t 늻��t���d�ڷQ�ؙC(j��)��(g��u)�ϵ����������r�²�����16 t(�����Ժ�늘O��늘O�U����������)��
�������σ��c(di��n)���O(sh��)��������(sh��)ֵ���ڌ�(sh��)�H��r�����ڱ��C��ȫ�ԡ�
��������ᘌ�(du��)��һ��(g��)���O(sh��)�M(j��n)�н�ģ��ᘌ�(du��)��(y��ng)�����ܼ��еIJ��֣����W(w��ng)���M(j��n)�оֲ���(x��)�����քe��3 t 늻��t�c8 t 늻��t�ļ��O(sh��)���r�O(sh��)��߅��l�����M(j��n)����⡣
3.2�������Y(ji��)��
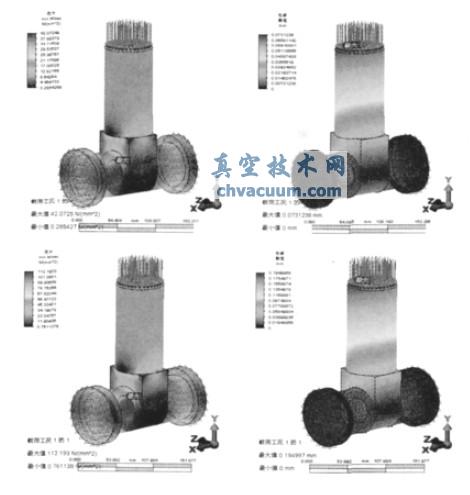
�D3 �N�S�ķ����Y(ji��)��
�����ĈD3 ���г����N�S�քe����3 t �c8 t ��(���ڌ�(du��)�Q���������d����O(sh��)���d�ɵ�һ��)����r�µđ�(y��ng)���cλ�ƽY(ji��)���D���ĈD�нY(ji��)���҂����Եó���8 t 늻��t���r��(����16 t ����r��)���N�S�ܼ�����С��45# 䓵Ŀ���(qi��ng)�ȣ��]�аl(f��)�������Ɖġ������(y��ng)��112 MPa ����r��������̎�a(ch��n)���ļ��Б�(y��ng)���ѽ�(j��ng)���^���ˣ����Կ�ͨ�^�Ӵ�ֱ���ȷ�����pС��
�������ڣ�����δʹ�N�S�Ɖģ��҂������M(j��n)һ������ģ�ͣ���ģ�ͺ�������ֱ���������M(j��n)һ����������Ͽ��ܳ��F(xi��n)��ʧЧ�F(xi��n)��
4����ܲ��ַ���
4.1��ǰ̎�������
����������(g��)��ܵĽY(ji��)��(g��u)�������ɂ�(g��)���ϵ�֧���������d������ϵ��N�S�ϣ����Ƀɂ�(g��)���µ�֧���������d������ęC(j��)��(g��u)�С�����(g��)�����Ҫ�ܵ���
������������������ã����䱡��̎���ܮa(ch��n)���Ɖġ�ᘌ�(du��)����ģ���c���O(sh��)���r���M(j��n)��߅��l�����O(sh��)�ã��������d����ܵ����҃ɂ�(c��)�N�S̎(��֧̎������)�������µ�֧����(du��)��(y��ng)�ă��N�S�O(sh��)��̶������M(j��n)����⡣
�����ڄ��־W(w��ng)��r(sh��)�����ڿ�����w�鷽�ܣ��A(y��)��׃�β����ÉK�w��Ԫ(�����w����(d��o)�Ļ�ϾW(w��ng)��Ԫ���g4~20 ��(g��)��(ji��)�c(di��n))�W(w��ng)���^����m[3]��
4.2��һ��W(w��ng)������Y(ji��)��

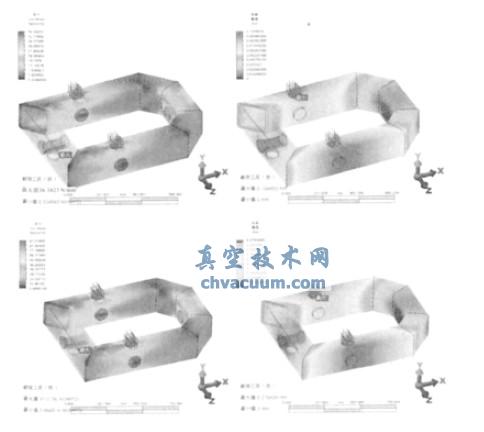
�D4 ��ܷ����Y(ji��)��
�D5 ��(x��)���W(w��ng)��֮��ķ����Y(ji��)��
�����ķ����ĽY(ji��)��(��D4 ��ʾ)���Ե�֪��(y��ng)����Ҫ�����ڙE�A�_��̎�ͺ��p̎��߅��l����3 t 늻��t��(sh��)�H���r�r(sh��)�����Б�(y��ng)����(y��ng)���^С��38 MPa����(d��ng)߅��l����8 t 늻��t�r(sh��)��������(y��ng)����100 MPa���҃ɷN���r�����(y��ng)�������F(xi��n)�ڿ�ܺE�A��̎���đ�(y��ng)���ֲ��D��Ҳ��֪�����ܺ��p̎���N�S֧���c��ܺ���̎Ҳ���^�����@�đ�(y��ng)�����У���8 t 늻��t���r�£����ϲ�λ���Б�(y��ng)���_(d��)����70 MPa~80 MPa��
�����鱣�C�Y(ji��)���Ĝ�(zh��n)�_�ԣ��҂�?c��)�����^���У���������������(sh��)�M(j��n)��Ӌ(j��)������⣬߀ᘌ�(du��)�ˆ��}��ʹ���˼�(x��)���W(w��ng)��Ͷ��A��Ԫ�քe�M(j��n)����⣬�����^�N�����ķ����Y(ji��)����
4.3����(x��)���W(w��ng)������Y(ji��)��
������(du��)������(g��)ģ���M(j��n)�м�(x��)��̎��������ᘌ�(du��)��(y��ng)�������������F(xi��n)�ڱ������r��߀Ҫ��(du��)����W(w��ng)���M(j��n)������(qi��ng)̎����ʹ�W(w��ng)���|(zh��)�������ߡ����ĽY(ji��)���Ͽ�����׃��С���f��������(du��)������(g��)��ܵĴ�С��ԭ�ȵľW(w��ng)���Ǻ��m�ġ�
4.4�����A��Ԫ�����Y(ji��)��
����ʹ�ö��A��Ԫ��������Ҫ�����(y��n)�C�Ե����ã���(d��ng)��(y��ng)�ö��A��Ԫ�W(w��ng)��ķ����Y(ji��)���cԭ�����Y(ji��)�����ܶ��r(sh��)���f��ԭ���������ھW(w��ng)���O(sh��)�������e(cu��)�`����(y��ng)�ö��A��Ԫ����ҪĿ���Ǟ��˸��ƉK��Ԫ�Ą��ԣ�ʹ����m��׃�����^�����r[4]�����ڶ��A��Ԫ��(hu��)ʹӋ(j��)��r(sh��)�g������ͬ�r(sh��)Ҳ���ڶ��A��Ԫ��ʹ�Õr(sh��)����Ҫ�^�ܵľW(w��ng)�������ڷ����r(sh��)���҂�?n��i)˞�،��W(w��ng)��Ĵ�С߀ԭ��Ĭ�J(r��n)��С(�s��ԭ������10%)������\(y��n)���ٶȣ��Ҳ����ڽ�����⾫�ȡ�
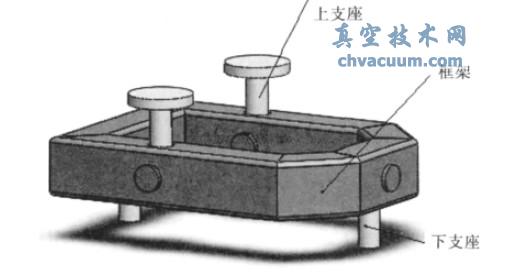
�����ķ����Y(ji��)���Ё���ʹ�ö��A��Ԫ�W(w��ng)���(hu��)ʹ���Y(ji��)��׃��׃�������@��ʹ�ö��A��Ԫ�����˴�����Ӌ(j��)��r(sh��)�g������ԭ��Ӌ(j��)��r(sh��)�g��ʮ�����ң����Y(ji��)���s���Ӳ��ࡣ�@���f���ˣ���ģ����׃�κ�С����(y��ng)�ö��A��Ԫ��δȡ�úܺõ�Ч�������f����ԭ�ȵľW(w��ng)�ֺ�������ǿ��ŵġ�
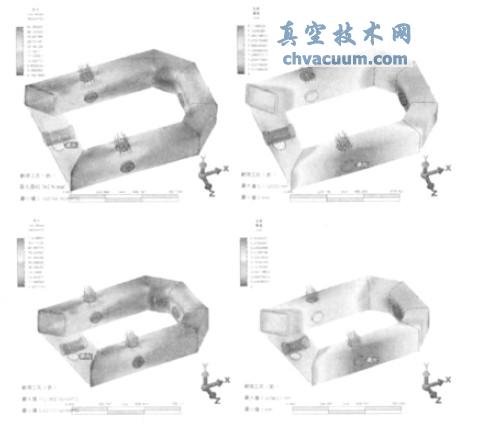
�D6 ���A��Ԫ�W(w��ng)������Y(ji��)��
4.5�������Y(ji��)��
������(j��ng)�^���Ϸ������ó����½Y(ji��)Փ��
����(1) ���Q�ؙC(j��)��(g��u)��ȫ���Ԅ���3 t 늻��t�Ĺ��rҪ���@һ�c(di��n)�oՓ�ĬF(xi��n)��(ch��ng)ʹ����r��߀�Ǐ�CAE ������r�������Ǜ]�І��}�ġ�
����(2) �ڷ����^���У���(du��)һЩ���r����(sh��)���˷Ŵ�̎���õ��˼��O(sh��)���r��������d���Ĵ�С�͌�(du��)�ں��p��̎���ϡ��ڌ�(sh��)�H��r�зQ�ؙC(j��)��(g��u)��ܵĺ��p���^���ڷ����в��ú���̎�������Ԍ�(sh��)�H�еĴp��(hu��)��(du��)����(g��)��ܵđ�(y��ng)������̎���a(b��)��(qi��ng)�����ã��Č�(sh��)�H�п����@�N�a(b��)��(qi��ng)��Ч�������@���������8 t 늻��t��(y��ng)�ô��Q�ؙC(j��)��(g��u)����Y(ji��)����(hu��)����CAE �����Y(ji��)����
����(3) ��(du��)��8 t 늻��t�Ĺ��r���f���mȻ�����Y(ji��)��δ��(d��o)��ʧЧ�����ǽ��h�ڼ�����(y��ng)��̎�M(j��n)���a(b��)��(qi��ng)���磺�Ӵ��N�Sֱ�����ڿ�܃�(n��i)����֧�ν�䓡����_��̎���a(b��)��(qi��ng)Ƭ�ȷ�����
5�����Y(ji��)
����(1) ��(du��)�ڴ���̆��}���h(yu��n)�Dz������W(xu��)����Փ���W(xu��)�Ȼ��A(ch��)���W(xu��)���ܽ�Q��Ŀǰ�ںܶ���(sh��)�H���̆��}�������{���̎��Ľ�(j��ng)�(y��n)������Ӌ(j��)����O(sh��)Ӌ(j��)���������^����O(sh��)Ӌ(j��)������
����(2) ͨ�^�������Q�ؙC(j��)��(g��u)��ֻ회�(du��)�ֲ��M(j��n)���m��(d��ng)��(y��u)�����ɑ�(y��ng)����8t 늻��t�ϡ�ͬ�r(sh��)Ҳ����ζ�����יC(j��)��(g��u)�ܑ�(y��ng)����3t ��8t 늻��tϵ�л��a(ch��n)Ʒ�У�������ϵ�л��a(ch��n)Ʒ���؏�(f��)�O(sh��)Ӌ(j��)��������аl(f��)Ч�ʡ�
����(3) ͨ�^��(sh��)�`�C����Algor ܛ���܉���ι����еĽY(ji��)��(g��u)�������}����(y��ng)������Ԫܛ��������Ч�؎��������O(sh��)Ӌ(j��)�ˆT���õă�(y��u)���O(sh��)Ӌ(j��)����(ji��)�s�аl(f��)�ɱ���