�����B(y��ng)·�C(j��)е���(q��)��(d��ng)�X݆��Ó��PLC���Ʒ����о�
��������ͨ�^(gu��)��(du��)�v��ϵ�б��(q��)��(d��ng)�X݆���Ó�����������PLC ���ƽ�Q��������(du��)���(q��)��(d��ng)�X݆���Ó���^(gu��)���M(j��n)�г�������O(sh��)Ӌ(j��)�����à�B(t��i)�C(j��)�����O(sh��)Ӌ(j��)��Փ����������^(gu��)���M(j��n)�Р�B(t��i)���֡���B(t��i)���a����������B(t��i)֮�g��D(zhu��n)�Ɨl�������ø���B(t��i)�r(sh��)�ĕr(sh��)�g���ƽ�Q��������(du��)�Ä�(d��ng)�X݆���ڸ���B(t��i)�r(sh��)Ó��늴��y���Ʒ�����
�����S�������B(y��ng)·�C(j��)е�İl(f��)չ�����N���͵ģ����ӏ�(f��)�s���B(y��ng)·�C(j��)е���M(j��n)�͇�(gu��)�a(ch��n)������܇���ƙC(j��)��(g��u)�IJ������ӣ�Ҫ���Һ����Խ��(l��i)Խ�࣬�S֮�w�eҲԽ��(l��i)Խ�������ǰ���õ�Һ��׃����(ZF)�ϰ��bҺ���õķ�ʽ�ѽ�(j��ng)���ٲ��á��෴���X݆���ϼ��а��b�õķ�ʽҲԽ��(l��i)Խ�܄�(d��ng)������(d��ng)�O(sh��)Ӌ(j��)���Ěgӭ��Ȼ���S�����ƙC(j��)��(g��u)�ď�(f��)�s����Һ����Ҳ�S֮���࣬���(q��)��(d��ng)�X݆���w�eҲ�S֮�����˜p�������ęC(j��)�ʣ����L(zh��ng)�X݆��������������X݆��Ó���X����ēp�����p���nj�(d��o)�����X݆���؏�(f��)��������Ҫԭ���o(h��)�X݆���治�ܓp�ij��������о������}�������������˱��(q��)��(d��ng)�X݆��Ó��PLC ���ƽ�Q������
1�����(q��)��(d��ng)�X݆��Ó��ԭ������
����1.1���C(j��)еÓ��ԭ������
�����F(xi��n)�ڵĴ����B(y��ng)·�C(j��)е�У����(q��)��(d��ng)�X݆���(d��ng)�����f��Ó��C(j��)е������D1 ��ʾ���Є�(d��ng)������(d��ng)��Ҫ�Ѓ�·�M�ɣ�һ·��l(f��)��(d��ng)�C(j��)→A→Һ��׃��������һ·��l(f��)��(d��ng)�C(j��)→A→C→B→Һ���á��D��C ���(n��i)�X݆���ړܲ�D �Ŀ����¿����ҙM���Ƅ�(d��ng)���ܲ�D ���ƚ�����L(f��ng)��늴��y���ƣ�늴��yD_RPN1s133a ���, D_RPN1s133b ʧ늕r(sh��)����(n��i)�X݆C �ړܲ�D����(d��ng)�������Ƅ�(d��ng)�M(j��n)�В�n���쵽λ�r(sh��)�ӽ��_(k��i)�P(gu��n)X182 �a(ch��n)����늴��yD_RPN1s133a ʧ�,D_RPN1s133b ��늕r(sh��)����(n��i)�X݆C �ړܲ�D ����(d��ng)�������Ƅ�(d��ng)�M(j��n)��Ó�n��Ó�n��λ�r(sh��)�ӽ��_(k��i)�P(gu��n)X183 �a(ch��n)����
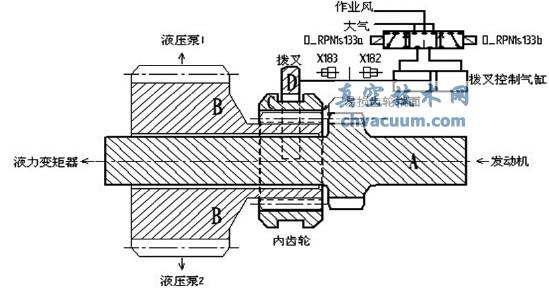
�D1 ���(q��)��(d��ng)�X݆���(d��ng)�����f��Ó��C(j��)е���ƺ�(ji��n)�D
����1.2�����(q��)��(d��ng)�X݆��Ó��I/O ����
�������������U��PLC �����µı��(q��)��(d��ng)�X݆��Ó����ƣ� ���X݆��Ó����������õ���׃���M(j��n)�����Q���x����ַ���䡢��(sh��)��(j��)��Ͷ��x��Ҋ(ji��n)�±�1��
��1 ���(q��)��(d��ng)�X݆��Ó��׃����


����1.3�����(q��)��(d��ng)�X݆��Ó��PLC Ӳ���O(sh��)Ӌ(j��)
��������(j��)I/O �Ľy(t��ng)Ӌ(j��)��������(g��)Ó��ϵ�y(t��ng)����10 ��(g��)ݔ���c(di��n)��5 ��(g��)ݔ���c(di��n)����(j��ng)�^(gu��)��N�x�ͷ������^�� �Q���x�����T��S7-300PLC �o����CPU ������Ɔ�Ԫ����̖(h��o)��CPU313-2DP��ӆ؛̖(h��o)��6ES7 313-6CF03-0AB0 ��ȫ���ԝM��ԓϵ�y(t��ng)����Ҫ����Ժ�ϵ�y(t��ng)ܛӲ������(j��)��Ҫ��Ӳ�����ü�����ϵ�y(t��ng)���D2��
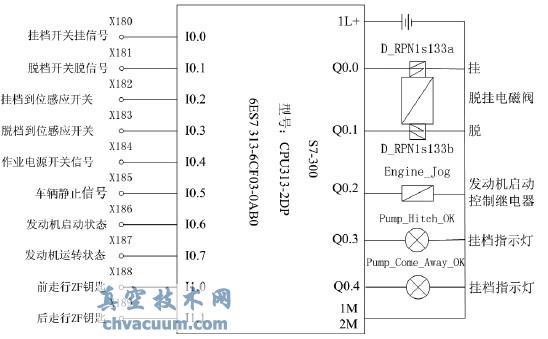
�D2 Ӳ�����ü�����ϵ�y(t��ng)
2�����(q��)��(d��ng)�X݆��Ó�������Փ
������(d��ng)���(q��)��(d��ng)�X݆���n�l���M��r(sh��)�� ���X݆��Ó/���_(k��i)�P(gu��n)������nλ���X݆���n늴��y����_(k��i)ʼ��n�����r(sh��)��T41 �_(k��i)ʼ���r(sh��)��T41 �r(sh��)�g����������ϣ��X݆���n늴��y���ֵ�늣�ֱ����n�l�����M����x����Ó�n�����T41 �r(sh��)�g����δ���ϣ��X݆���n늴��yʧ늣�Ó�n늴��y��늡�Ó�n��λ�r(sh��)��T42��T43(T43>T42)�_(k��i)ʼ���r(sh��)��ͬ�r(sh��)�a(ch��n)���l(f��)��(d��ng)�C(j��)�c(di��n)��(d��ng)������̖(h��o)Q0.2��ʹ�l(f��)��(d��ng)�C(j��)���S�̕��\(y��n)�D(zhu��n)��T42 �r(sh��)�g������(f��)λ�l(f��)��(d��ng)�C(j��)�c(di��n)��(d��ng)������̖(h��o)Q0.2���l(f��)��(d��ng)�C(j��)���Sֹͣ�D(zhu��n)��(d��ng)��T43 ���r(sh��)�r(sh��)�g������n늴��y�����µ�늣��ٴΒ�n��δ���ϙn�r(sh��)���؏�(f��)������(d��ng)��������δ���ϙn→Ó�_(k��i)��n→��(f��)λ�l(f��)��(d��ng)�C(j��)�c(di��n)��(d��ng)������̖(h��o)→�ٴΒ�n���O(sh��)�Þ�3 ��ѭ�h(hu��n)��߀δ���ϕr(sh��)��ֹͣ��n��(d��ng)������ݔ����nʧ��ָʾM90.3��
3�����(q��)��(d��ng)�X݆��Ó���������O(sh��)Ӌ(j��)
����3.1�����B(t��i)���x�����a
��������(j��)�X݆���n�^(gu��)�̣����䰴��B(t��i)���֣��ɷ֞��ʼ�B(t��i)����n�B(t��i)��Ó�n�B(t��i)����B(t��i)���a���±�2 ��ʾ�����X݆��Ó���B(t��i)���a
��2 ���(q��)��(d��ng)�X݆��Ó���B(t��i)���a��

�������f(shu��)�����_(d��)ʽ���P(gu��n)ϵ���������õ��ķ�̖(h��o)“*”���x��߉�c����̖(h��o)“+”���x��߉��̖(h��o)“-”���x��߉��.���ϱ��ɵó�����(g��)��B(t��i)���_(d��)ʽ��
����G1A=(-M_gear1)* (-M_gear2) G1B=(-M_gear1)*M_gear2 G1C=M_gear1*(-M_gear2)
����3.2��Ó���B(t��i)�D(zhu��n)�Ɨl������
��������(j��)�X݆���n��Փ����B(t��i)���֡���������B(t��i)�D(zhu��n)����r���ɴ˵ó����X݆�Ò�n��B(t��i)�D(zhu��n)�ƈD�����D3 ��ʾ��
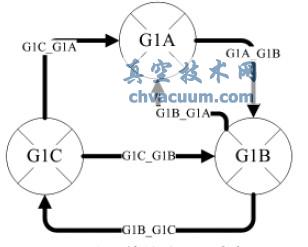
�D3 �(q��)��(d��ng)�X݆���n��B(t��i)�D(zhu��n)�ƈD
������B(t��i)�D(zhu��n)�Ɨl��������
�������_(d��)ʽ��G1A_G1B=G1A*Work_Ready*Engine_Stillstand*X185*(-X182)
����*(X180+Engine_Stillstand(N))
����G1B_G1A=G1B*((-X182)*(-Work_Ready)+X181*X185+(-X184))
����G1B_G1C=G1B*Pump_Hitch_Delay*(-X182)
����G1C_G1B=G1C*Pump_Come_Away_Delay
����G1C_G1A=G1C*((-Work_Ready)+X180+Pump_Failing)
����3.3�����I(y��)����(d��ng)��(zh��n)����̖(h��o)
����܇�v��ֹ�r(sh��)���P(gu��n)�]ǰ��˾�C(j��)�ҙC(j��)е����耳��_(k��i)�P(gu��n)�����_(k��i)���I(y��)�Դ�_(k��i)�P(gu��n)�������I(y��)����(d��ng)��(zh��n)��á�
�������_(d��)ʽ��Work_Ready=X185*X184*(-X188)*(-X189)
����3.4���l(f��)��(d��ng)�C(j��)�oֹ�̿���̖(h��o)
���������10S ��(n��i)δ�յ��l(f��)��(d��ng)�C(j��)����(d��ng)��B(t��i)ָʾ��̖(h��o)X186 �Ͱl(f��)��(d��ng)�C(j��)�\(y��n)�D(zhu��n)��B(t��i)ָʾ��̖(h��o)X186 �r(sh��)����(f��)λ�l(f��)��(d��ng)�C(j��)�oֹ?f��n)�B(t��i)�O(ji��n)�y(c��)��̖(h��o)(�����l(f��)��(d��ng)�C(j��)̎���oֹ?f��n)�B(t��i))������l(f��)��(d��ng)�C(j��)�چ���(d��ng)��B(t��i)���\(y��n)�D(zhu��n)��B(t��i)�r(sh��)��δ�յ���n��λ��̖(h��o)���В�n�_(k��i)�P(gu��n)��̖(h��o)�����յ���n��λ��̖(h��o)������Ó�n�_(k��i)�P(gu��n)��̖(h��o)�������l(f��)��(d��ng)�C(j��)�oֹ?f��n)�B(t��i)�O(ji��n)�y(c��)��̖(h��o)��λ��
�������_(d��)ʽ��Engine_Stillstand=(X180* (-X182)+X181*X182)* (X186+X187)
����T40=(-X186)*(-X187)
����Engine_Stillstand(N)=Engine_Stillstand �½���
����3.5���l(f��)��(d��ng)�C(j��)�c(di��n)��(d��ng)����
����G1C �B(t��i)�� �յ�Ó�n��λ��̖(h��o)X183 �r(sh��), �l(f��)��(d��ng)�C(j��)�c(di��n)��(d��ng)���r(sh��)����Ó�n��λ���r(sh��)���_(k��i)ʼ���r(sh��)������δ�յ���nʧ����̖(h��o)�Ͱl(f��)��(d��ng)�C(j��)�c(di��n)��(d��ng)���r(sh��)�����r(sh��)δ�Y(ji��)���r(sh��)��ݔ���l(f��)��(d��ng)�C(j��)�c(di��n)��(d��ng)��̖(h��o)���l(f��)��(d��ng)�C(j��)�c(di��n)��(d��ng)���r(sh��)�����r(sh��)�r(sh��)�g����(f��)λ�l(f��)��(d��ng)�C(j��)�c(di��n)��(d��ng)��̖(h��o)���l(f��)��(d��ng)�C(j��)ֹͣ�D(zhu��n)��(d��ng)�����˱��C�X݆���ٴΒ�n�r(sh��),�_���l(f��)��(d��ng)�C(j��)��ֹͣ�D(zhu��n)��(d��ng),Ó�n��λ��(d��ng)�Ķ��r(sh��)�����r(sh��)�r(sh��)�gҪ���c(di��n)��(d��ng)���r(sh��)�����r(sh��)�r(sh��)�g���L(zh��ng)�����r(sh��)�r(sh��)�g����B(t��i)�D(zhu��n)�ơ�
�������_(d��)ʽ��Engine_Jog =G1C*X183* (-Engine_Jog_Delay)* (-Pump_Failing)
����Engine_Jog_Delay=G1C*X183
����Pump_Come_Away_Delay=G1C*X183
����3.6�����(q��)��(d��ng)�X݆���nӋ(j��)��(sh��)
�����յ���n��̖(h��o)����nʧ����̖(h��o)���l(f��)��(d��ng)�C(j��)�̿�ֹͣ������̖(h��o)�����ؕr(sh��)��Ӌ(j��)��(sh��)λ���㡣ÿ�յ�һ�ΰl(f��)��(d��ng)�C(j��)�c(di��n)��(d��ng)��̖(h��o)��Ӌ(j��)��(sh��)λ��1. Ӌ(j��)��(sh��)λ��ֵ����3 �r(sh��)��ݔ�����X݆�Ò�nʧ����̖(h��o)��
�������_(d��)ʽ:(X180+Pump_Failing+Engine_Stillstand(N))������Pump_Hitch_Degree=0;
����Engine_Jog ������Pump_Hitch_Degree=Pump_Hitch_Degree+1M90.3=(Pump_Hitch_Degree=3)
����3.7�����(q��)��(d��ng)�X݆���n�yݔ��
����G1B �B(t��i):��(f��)λ�l(f��)��(d��ng)�C(j��)�̿�ֹͣ��̖(h��o)����n�y��늣���n���r(sh��)���_(k��i)ʼ���r(sh��)��G1A �B(t��i):�o(w��)Ó�n�_(k��i)�P(gu��n)��̖(h��o)���յ���n��λ��̖(h��o)�r(sh��)����n�y��늡���n늴��y��늣��յ���n��λ��̖(h��o)����n�ɹ�ָʾ������
�������_(d��)ʽ��Q0.0=G1B+(G1A*(-X181)*X182)Pump_Hitch_Delay=G1B
����Q0.3=Q0.0*X182
����3.8�����(q��)��(d��ng)�X݆��Ó�n�yݔ��
����G1C �B(t��i)��܇�v̎�ڽ�ֹ?f��n)�B(t��i)�r(sh��)��Ó�n�y��늡�G1A �B(t��i)��܇�v̎�ڽ�ֹ?f��n)�B(t��i)�r(sh��)���յ�Ó�n�_(k��i)�P(gu��n)��̖(h��o)X181��Ó�n�y��늡�������δ�յ���n��λ��̖(h��o)X182 �£� �](m��i)��Ó�n��λ��̖(h��o)X183 �����I(y��)����(d��ng)��̖(h��o)��(zh��n)��Õr(sh��)��Ó�n�yҲ��늡�Ó�n늴��y��늣��յ�Ó�n��λ��̖(h��o)X183��Ó�n�ɹ�ָʾ������
�������_(d��)ʽ��Q0.1 =X185* (G1A* (X181 +(-X182)* ((-X183) +Work_Ready))+G1C)
����Q0.3=Q0.1*X183
4���Y(ji��)���Z(y��)
�������X݆��Ó���Ǵ����B(y��ng)·�C(j��)е��(d��ng)������(d��ng)ϵ�y(t��ng)��һ��(g��)��Ҫ�M�ɲ��֡�“�����ġ���ȫ�ġ����ܻ���”Ó��늚����ϵ�y(t��ng)��Ó����Փ�������������X݆��ĉ������������X݆��ľS�ɱ�����������PLC ���Ʒ����� ��B(t��i)�C(j��)����ԭ���������е����X݆��Ó�������Փ���ܺ�(ji��n)�Ρ���������Ч�ؽ�Q���X݆�������x����Ó���D(zhu��n)�Q��(w��n)�}����(zh��n)�_������(w��n)�}�����^(gu��)�������ڠ�B(t��i)�ĺ���Ҏ(gu��)������B(t��i)���֡���B(t��i)���a����B(t��i)�D(zhu��n)�Ʒ�ʽ���\(y��n)�ø���ʹPLC �����O(sh��)Ӌ(j��)��������Ҏ(gu��)������ʹ��(w��n)�}׃�ú�(ji��n)�λ�����������