����VB��PRO/E��݆�C(j��)��(g��u)���S����(sh��)����ģ���\(y��n)��(d��ng)�������
��������Pro/E�ą���(sh��)�����S��(sh��)�w�����ܣ�ͨ�^(gu��)VB��Automation Gateway(AGW)��(du��)Pro/E�M(j��n)�ж����_(k��i)�l(f��)���O(sh��)Ӌ(j��)��ֻ����VB�_(k��i)�l(f��)���˙C(j��)����������ݔ���������(sh��)�������Ԅ�(d��ng)����c��������(sh��)��(du��)��(y��ng)�ĸ��N݆���Ą�(d��ng)�����b���݆�C(j��)��(g��u)�ľ��_���S����(sh��)����ģ�������ԓ݆�C(j��)��(g��u)�ķ���������\(y��n)��(d��ng)������
��������
����݆�C(j��)��(g��u)���нY(ji��)��(g��u)��(ji��n)�Ρ��o�����O(sh��)Ӌ(j��)�������(sh��)�F(xi��n)�A(y��)���\(y��n)��(d��ng)�����c(di��n)������ڸ��N�Ԅ�(d��ng)�C(j��)е�ж������V���đ�(y��ng)�á�
����݆�ɷ֞�P(p��n)��݆(�ϲ�ʽ��ƽ��ʽ)���Ƅ�(d��ng)݆���A����A�F݆(�ϲ�ʽ�Ͷ���ʽ)�ȎN��Ҋ(ji��n)��ͣ��Ą�(d��ng)����ֱ��(d��ng)�͔[��(d��ng)�ɷN�\(y��n)��(d��ng)��ʽ���Ą�(d��ng)���Ķ˲��Y(ji��)��(g��u)�м�픡��L�ӡ�ƽ�ס�����ȡ��Ą�(d��ng)�����\(y��n)��(d��ng)�^(gu��)��һ������Ƴ̡��h(yu��n)��ֹ���س̺ͽ���ֹ�Ă�(g��)�A�Σ��Ą�(d��ng)�����Ƴ̡��س̳�Ҋ(ji��n)���\(y��n)��(d��ng)Ҏ(gu��)���е����\(y��n)��(d��ng)���ȼ��ٵȜp���\(y��n)��(d��ng)���[���\(y��n)��(d��ng)����(ji��n)�C�\(y��n)��(d��ng)����ζ��(xi��ng)ʽ�\(y��n)��(d��ng)�ȡ��Ą�(d��ng)�����\(y��n)��(d��ng)Ҏ(gu��)�ɛQ����݆�������Π�������S�O(sh��)Ӌ(j��)ܛ���O(sh��)Ӌ(j��)݆�r(sh��)����Ҫ���]�Ą�(d��ng)�����\(y��n)��(d��ng)Ҏ(gu��)�ɣ���Ҫ���]����������(sh��)��(du��)݆݆����Ӱ푣��@����݆����(sh��)�����S��ģ�����x���ڡ�
�����mȻPro/E�е�program�܌�(sh��)�F(xi��n)݆����(sh��)�����S��ģ��������(g��)��ģ�^(gu��)�̲���Ó�xPro/Eܛ�����o��������(l��i)�T��㣬�ʱ�������VB�_(k��i)�l(f��)��(d��)����
����������棬��ݔ��ֵ�x�oAGW������AGW�(q��)��(d��ng)Pro/E����׃������(sh��)������������݆ģ��;��݆�C(j��)��(g��u)�еĸ�����(sh��)�͙C(j��)��(g��u)������Č�(du��)��(y��ng)����(sh��)�P(gu��n)(li��n)����(l��i)���Ԅ�(d��ng)��(sh��)�F(xi��n)�ߴ��(q��)��(d��ng)��������݆�C(j��)��(g��u)�����Sģ�͡��@�N����������(ji��n)�㣬Ч�ʸߡ�����VB��Pro/E��݆�C(j��)��(g��u)���S����(sh��)����ģ���\(y��n)��(d��ng)����������^(gu��)����D1��ʾ��
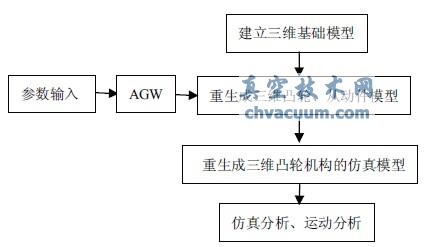
�D1 ݆�C(j��)��(g��u)���S����(sh��)����ģ���\(y��n)��(d��ng)�����������
1��݆�����S����(sh��)����ģ
������ͬ�N�݆��Ҫ�Ļ�������(sh��)��ͬ���F(xi��n)��ƫ��ֱ��(d��ng)�L�ӏĄ�(d��ng)���P(p��n)��݆�C(j��)��(g��u)�������f(shu��)����ģ�^(gu��)�̡�
����1.1�����S���A(ch��)ģ�͵Ľ���
����1.1.1����������(sh��)���O(sh��)��
��������(d��ng)Pro/E�h(hu��n)�����x����/���������INPUT��END INPUT�Z(y��)�����gݔ��D2��ʾ���Z(y��)�䣬��P(p��n)��ݔ�������(sh��)��ֵ����������(sh��)�������Ќ�(du��)��(y��ng)��׃����̖(h��o)���1���У����еij�ʼֵ����o������Ҫ���C�Ƴ̽ǡ��h(yu��n)�ݽǡ��س̽ǡ����ݽ�֮�͞�360°��
4���Y(ji��)���Z(y��)
������������AGW��(sh��)�F(xi��n)��Pro/E��VB�Ĕ�(sh��)��(j��)���f�������ʹ��Pro/E�е�program���ą���(sh��)���ɲ����Ը���(qi��ng)���O(sh��)Ӌ(j��)�߲�����ϤPro/Eܛ���������݆���O(sh��)Ӌ(j��)Ӌ(j��)�㡢���S��(sh��)�w��ģ���\(y��n)��(d��ng)���漰�\(y��n)��(d��ng)����������������O(sh��)Ӌ(j��)���|(zh��)����Ч�ʡ��O(sh��)Ӌ(j��)����݆���S��(sh��)�wģ�ͣ�������݆���O(sh��)Ӌ(j��)����������(sh��)�ؼӹ��ȡ����ĵ��O(sh��)Ӌ(j��)������ȫ�m��(y��ng)��������͵�݆��݆�C(j��)��(g��u)��