���ډK��Ӌ��ȫϢ�D��ֵ���㷨
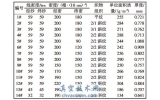
�����������Ӌ��ȫϢ�D���y(t��ng)��ֵ��������Ӌ���ٶȣ����������һ�N���ډK��Ӌ��ȫϢ�D��ֵ���������Ĕ�(sh��)ֵ�جF(xi��n)����جF(xi��n)�ɂ�������C���@�N��ֵ�������Ŀ����ԣ����c�_�����;��a�جF(xi��n)�Y���M�б��^�����^�Y����������ͬ�ߴ�ԭ�DӋ�����ֵ��ȫϢ�D�����㷨�ĕr�H���_��III �;��a��1/36��Ȼ������ɷN�������Եă�(y��u)ȱ�c������Փ�Ͻ����Ӱ��جF(xi��n)�D���|����ԭ�Y���������c�_�����a��ȣ�����������Ķ�ֵ�����������\����١��ʴ_�ă�(y��u)�c��
����ȫϢ���g���J������K�����S�@ʾ���g�������ӛ������S���w���е�ҕ����Ϣ�����Sҕ�XЧ�����档��������ӛ䛷�����ӛ䛲��|�����ƣ����y(t��ng)��WȫϢ�����܌��F(xi��n)���r���ӑB(t��i)���@ʾ�������oĩ�S��Ӌ��C���g����(sh��)�ֶ�ý�w���g�Լ��@ʾ���g�İl(f��)չ��Ӌ��ȫϢ�g�c���g���{������Spatial Light Modulator ,SLM���ĽY��ȫϢҕ�l�ɞ���ܣ��Ķ��՝u�ɞ��о����c��
����Ӌ��ȫϢ�g����(j��)ȫϢ��ԭ����ͨ�^���a���������w������Ⲩӛ���һ�����S�ľ���С�����(j��)��Ⲩ������x���L�̺;��a�����IJ�ͬ��Ӌ��ȫϢ�D�в�ͬ���������Ⲩֻ��һ����(sh��)�W�ϵĴ��ڣ��@�����S���w�������挍��Ҳ������̓�M�ģ����Ӌ��ȫϢ�g���Ъ��صă�(y��u)�c�͘O����`���ԡ�����ȫϢ�D���Ӌ�������Ϳ��g���{�����ֱ��ʵIJ��������Ŀ�����Ҹ��g�о��l(f��)չӋ����863 Ӌ�����Y���Ŀ��2007AA01Z303�����ߵȌWУ�W�Ƅ�(chu��ng)������Ӌ�������Y���Ŀ��B07027��������Ӌ��ȫϢ���g�İl(f��)չ��Ŀǰ��ᘌ����r�ӑB(t��i)ȫϢ�@ʾ��һЩ�����㷨�������������ʡ�����WԺ���g����С�M��M. Lucente, ��������������㷨��diffraction specific����ʡ���˂��y(t��ng)ȫϢ�DӋ�㷽�������Ȍ���Ⲩ�����Ӌ�㣬�\������˼�S������˻����l�y���¸����������Ӌ���ٶȡ��ձ�ǧ�~��W��������\���ٶȣ��_�l(f��)�ˌ��ü����·�����rȫϢ���x�F(xi��n)�����M��һ����һ����r��Ӌ��ȫϢ�D���������N��ʽ�جF(xi��n)����W�جF(xi��n)����(sh��)ֵ�جF(xi��n)�Լ�����جF(xi��n)����(sh��)ֵ�جF(xi��n)����جF(xi��n)�DZ����Ќ�����Ҫ�������ֶΡ�����جF(xi��n)�Y���ˬF(xi��n)���@ʾ���g��Ӌ��C���g����Ӌ��õ��Ķ��S����D�Q��늉���̖��ʩ���ڿ��g���{�����ϣ��_�����������M���{�Ƶ�Ŀ�ģ� LCOS ������Խ��ԽС�����سߴ������Ч�ʶ��ɞ����جF(xi��n)�й��{���������x��
����LCOS �@ʾ����ͨ�^�������ƫ��������{�Ɓ��_���{������⏊�ȵ�Ŀ�ģ����{���^������λ������һ������(sh��)�����S��ݔ���Ҷȼ���׃����׃�����@�ͽo����جF(xi��n)�����Ƽs���أ����ȫϢ�Dͨ���H�H��������������λ�M���{�ơ�Ŀǰ���˽�QҺ�����g���{��������λ���}��һ�㶼�nj�Ӌ��õ���ȫϢ�D��ֵ������̎���ɻҶȵȼ�ֻ��0 ��255 �ĈDƬ���@�ӵõ���ȫϢ�D���ֻ�к��εăɂ��Ҷȣ���˲����ڻҶȲ�ͬ�������λ������ȫϢ�D�Ŀ��ɔ_������
�������ˌ��F(xi��n)ȫϢ�D�Ķ�ֵ��������1965���_�������^������_�����;��a���@�N���a��ʽ�õ���ȫϢ�D�������Ƕ�ֵ���ġ��_�����a�ô�ӛ䛵���Ⲩ�{��ȫϢ�D�й�ŵ��Π��λ�ö�����ȫϢ�D�ĻҶȷֲ�������������ؿ���(sh��)��Ҫ��ܸߣ�һ����g���{����1024*768�����ؔ�(sh��)���y�M�㡣߀��������һЩ���a������Burch���a�д�ӛ䛵���Ⲩ�{�Ƶ���ȫϢ�D�ĻҶȷֲ���ֱ��Ӌ��õ����ǻҶ�ȫϢ�D�������܌��@�ӵ�ȫϢ�D�M�й���جF(xi��n)����횲��Ì��õĶ�ֵ��������Ŀǰ���Ҷ�ȫϢ�D��ֵ���ķ������࣬��Ҫ�ֳɃɷN��һ�N�Ƿǵ����㷨������Floyd and Steinberg�����������Hauck and Bryngdah����Ӌ��ȫϢ���`��Uɢ�㷨��error diffusion����ÿ�����صĻҶ�ֵ��ֵ��a�����`����Ҫ����Ӌ�㣬��Ӌ��C��Ӌ���ٶ�Ҫ��ܸߡ���һ�N�ǵ����㷨������(j��)�����мs���l���IJ�ͬ�����кܶ���������������interative stepwise����ֱ�Ӷ�ֵ��������directbinary search���Լ��ݶ��S�C��ֵ��[16]��gradual and random binariation �����������x��ɂ���ͬ���ֵ��ÿ����һ�ΰ���һ���IJ��L��׃�ֵ�����ɂ��ֵ������ȕr���˳�������ֱ�Ӷ�ֵ�������t��ÿ�ε�����ֻ��һ���ֵ���ݶ��S�C��ֵ��ÿ�ε������^���б���ֵ�����������S�C�ģ����ҽ��^��ֵ̎�������ؔ�(sh��)Ŀ���ݶ����ӵġ��������܉�����������جF(xi��n)�D��Ϣ�Gʧ�����Dz����ڌ��r�@ʾ�����˽��Ͷ�ֵ���^�̵��\�������������һ�N�ǵ����Ķ�ֵ���㷨��
���������������ֽM�ɡ���һ���ֽ�B�_�����a��ԭ����������ĵĶ�ֵ���㷨���ڶ����ֽo�����@�N�㷨��ֵ����õ���ȫϢ�D�Ĕ�(sh��)���جF(xi��n)�Y���Լ��c�_�����a��(sh��)ֵ�جF(xi��n)�Y���ı��^���������ֽo�����@�N�㷨��ֵ����õ���ȫϢ�D�Ĺ���جF(xi��n)�Y���c�_�����;��a����جF(xi��n)�Y���ı��^������DZ��ĵĽYՓ��
1����ֵ�����������
1.1���_�����;��a�Ķ�ֵ��ԭ��
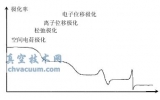
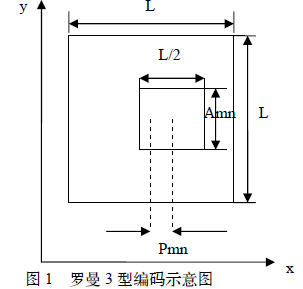
�����_������(j��)��Ҏ(gu��)�t��ŵ�����Ч����������ػ�λ�ྎ�a���g������(j��)ͨ����Πͬ�a����3 �N�_���;��a�����_���a���_���a����c�����ɷN�_���;��a���о��ȸߵă�(y��u)�c����˱������x���_�����;��a���D1���_�����;��a��ʾ��D��̓�MȫϢ��Ƭ����ҕ��������С��Ԫ�ĽM�ϣ�ÿ�������Ά�Ԫ����һ������ͨ��ף�ͨ��Č���һ����һ���x���L/2��ͨ��߶�Amn �ɴ�ӛ�����ⲨXm,Yn ̎�ķ�ֵ�{�ƣ�����L�����L �Ĵ�С�Q���ɱ��{������ļ���(sh��)��ͨ������ĵ������Ά�Ԫ���ĵ�ƫ����Pmn �ɴ�ӛ�������ⲨXm,Yn ̎����λ���{�ƣ�L ��СҲ�Q���ɱ��{����λ�ļ���(sh��)��LԽ���������λ�ɱ��{�Ƶļ���(sh��)Խ�࣬�õ���ȫϢ�DԽ���_����Ӌ���У�L һ��ȡ2������(sh��)�η���Ӌ�������ͨ���λ�úʹ�С���M���õ�ȫϢ�D���@�N���a��ʽ�µõ���ȫϢ�D�ɘ��c��(sh��)����IJɘ��c��(sh��)��L*L �����_�����a�ă�(y��u)�c������ֱ�ӵõ���ֵ����ȫϢ�D��ȱ�c����Ӌ�������܌��F(xi��n)���r�@��
1.2�����ډK�Ķ�ֵ������
��������(j��)�_�����a�ľ��aԭ����Ӌ��õ���ȫϢ�D�����ؔ�(sh��)��С������������ؔ�(sh��)��С�Ĕ�(sh��)����Ҫ�õ�Ӌ�㾫�_��ȫϢ�D��Ӌ��CӋ��������Ӌ���ٶȵ�Ҫ��ܸߣ����Ͽ��g���{�������ؔ�(sh��)Ŀ�����ƣ��_�����a�ڬF(xi��n)�A�β����m�������S���r�@ʾ��Burch ���a�mȻӋ��õ����ǻҶ�ȫϢ�D������ȫϢ�D�����ؔ�(sh��)Ŀ��δ���ӣ���˺ĕr�������_�����a���p�� ����ˣ���ͨ�^Burch ���aӋ��Ҷ�ȫϢ�D�����Ì��T�Ķ�ֵ���㷨�M�ж�ֵ���ķ����ǿ��еġ�