���ʰȡ��ʰȡ����푑��r�g�cӰ����ص��о�
����С�����ʰȡ�����V���������p�|С��Ԫ�����İ��\�C��֮�С�ͨ��Ҫ�������ȡ���ڈ��а��\���I�r��ʰȡ�����M����Ѹ��,�係푑��r�g���y�T��������⽵�������\��������푑��r�g֮�͡�����ͨ�^��Փ�ƌ��õ��˹����\��푑��r�g��Ӌ�㹫ʽ������fluent ܛ��,ģ�MӋ���˳��ܵ��ȵĚ��w�Uɢ���������^��,��ӑՓ����չܵ��L���cֱ����������ݷe�����،����푑��r�g��Ӱ푡�Ӌ��YՓָ����������ʰȡ��푑��ٶȵ���Ч;����
����С�����ʰȡ����IT �ИI�б��V���������p�|С��Ԫ����(��ʯӢ��Ƭ��Ƭʽ������Ԫ����С�ͼ��ɉK��) �İ��\�C��֮�С����a�^��ͨ��Ҫ�����ʰȡ���ڈ��а��\���I�r��ʰȡ�����M����Ѹ��,��������aЧ�ʡ����ЌW���о��˲�����հl������ʰȡ��ϵ�y������푑��r�g,���Č��Բ�����ձ������ʰȡ��ϵ�y�錦��,ᘌ�ʰȡ����푑��r�g����Ӱ�����,�_չ��Փ������Ӌ���о���
1�����ʰȡ���Y���c����ԭ��
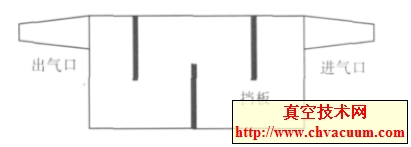
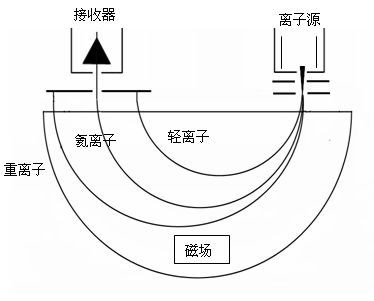
�������ʰȡ��ϵ�y�����P�����ܵ����Q���y�T������ޡ�����չ�·�Ȳ��ֽM��,��D1 ��ʾ��
�D1 �����ʰȡ��ϵ�y�Y��ʾ��D
������1 —������Ʒ;2 —������P;3 —���ܵ�;4 —��ͨ늴��y;5 —�����;6 —����·
�����Ŀ���ϵ�y�l��ʰȡ���������_ʼ,��������P��������Ʒ��ȫ���Ξ�ֹ,����ʰȡ�^�̵�ϵ�y푑��r�gt ����������:����y�T������������ȫ��ͨ�Ą���푑��r�gt1 ����չܵ��_ʼ��⽵����������Ʒ�_ʼ�Ƅӵij��푑��r�gt2 ������Ʒ�\����������P�����εĘ�Ʒ�\�ӕr�gt3 ����
t = t1 + t2 + t3 ������(s) (1)
���������y�T����푑��r�gt1 �������x��Ԫ���������������Q����,�܉������a�S���ṩ�䔵��,ͨ���ڎ�ʮ����֮�ȡ������푑��r�gt2 �͘�Ʒ�\�ӕr�gt3 ,�t��ȫ�������ʰȡ��ϵ�y�ĽY����ˇ�������Q����,����քe����Ӌ�㡣
2��������Ʒ�\�ӕr�g��Ӌ��
�����ں��Թ�����Ʒ�IJ�ƽ���ȵȌ��H���صĽ�����,��Ʒ�����P�·���������

����ʽ��d —���P�ڵ���Ч�ȏ�(m) ; P0 —�h����≺��(105 Pa) ; P —���P��څ^��Ě��wƽ������(Pa) ; m —������Ʒ���|��(kg) ; g —�������ٶ�(9.8 m·s - 2 ) ����Ʒ�l���\�ӵij�ʼ�l��(����s ���ӛ)��

����ͨ�^�����ӵĚ��w�؈D1 ��P0 �c��P �c���������ò�Ŭ������ ,������Ì����Ě��w������

��������ρ—�����ܶ�(��1.20kg·m- 3) ;δ—��Ʒ�����P�ij�ʼ���x(m) ;
�������ĺ����Ӌ�����,�ژ�Ʒ�_ʼ�\��֮��(ȡF=0 �r��r�gԭ�ct = 0) ,���P�ȵĚ��wƽ�������S�r�g���Ƴɾ��Խ���څ��,����:
![]()
����ʽ��α—�����f�pϵ��( s - 1) ����ʽ(5) ����ʽ(2) ,���ǘ�Ʒ�\���^���е�����Ҏ�ɼ��\�ӷ��̞�

�������\����Եõ���Ʒ���_ʼ�\�ӵ������P��������ĕr�g��
��������ʽ(7)��֪,��Ʒ�\�ӕr�g��Ҫ�ܘ�Ʒ�|�������P�ȏ�����Ʒ�c���P�g���x���Լ����ܵ��ĉ����f�pϵ����Ӱ푡��e��Ӌ��,��m = 2 g , d = 3mm ,δ= 2 mm ,α= 346 s - 1 ,�t��Ʒ���Ӊ���ps = 97.2kPa ,��������qs = 1.28 L ·s - 1 , �\�ӕr�gt3 =4.66ms��
3�����푑��r�g��ģ�MӋ��
�������ʰȡ���ij�⽵��푑��r�gt2 ��ȫȡ�Q��ϵ�y�ĽY����ˇ����,����������P�ĽY���Π��c�ߴ硢���ܵ����L���cֱ�����y�T��ͨ��������������ݷe���Լ���ձ�ͨ�^����·������ij��ٺ������_���ı�����նȡ�
�����x�����Fluent ܛ����ϵ�y�Ȳ��Ě��w�Uɢ�����^���M���˔�ֵģ�M��ᘌ���Ҫģ�M�����ʰȡ��ϵ�y,��ȫ�������挍�ߴ罨��Ӌ��ģ�͡���ģ�r�����ܵ��������Lֱ�A��;����y�TҲ������һ��ֱ�A�ܵ�,������O�鉺������߅��l��,����UDF ���̌������P�ڕr�g��׃�����]��Ӌ����;����ރȉ����_ʼȡ�鱾����;�ھ��x������P����h�Ĵ��h��̎,ȡ�o���h�㉺߅��l����Ӌ��r�x������[ʽ�Ƿ��B�����, ����ģ���x��S2A. ģ�͡�Ӌ��r�g���L��0.001s ,�����Δ���20 ����
�D2 �����ʰȡ����FLUENTģ�͡����D3 �����ʰȡ����ډ����c���r�g���Pϵ����