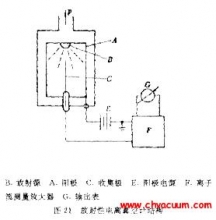
ʯӢ���Ӌ���L���еđ���
���������y�����g��ԇ�՚�����W��һ���Ҫ�о��n�}�����ډ������������g�����ƣ����L��ԇ����y�Ծ��_�y��С����ֵ�����Ļ���ʯӢ���Ӌ�����аl��һ�����y��ϵ�y�����о��˼��L��·���y��ϵ�y��Ӱ푡�ԓϵ�y�܉�y��0.2k Pa2k Pa��������ͬ�����32·�����y�����L���y��ԇ�Y�����������y��ϵ�y������Ч�����ڸ߳���С�����y��ԇ�Ҝy�����ȃ���15%�y��ֵ��
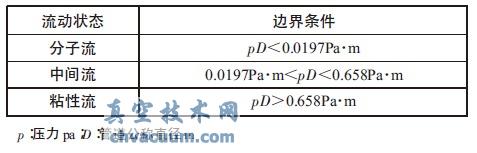
�����L��ģ�͜y��ԇ��ǫ@���w��������d�ɷֲ��͚�����Ե���Ҫ����֮һ����Ҏ�߳����L���Мy����̎�ĉ���ͨ���ɜy�����ܽ�ģ��֧�U��֧���B�ӵ��L�������Ӊ��������yģ�K���M�Мy������Ӊ��������yʹ�ø߾��ȹ艺������������^�߉����£��܉�@���^�õĜy�����ȣ�������1k Pa�����������o���@�ø߾��ȵĜy���Y����ģ�ͱ��L�^�����y�����y��ԇ�ײ������y�������ܶ��L���y��ԇ�Ⱦ����ڴ������y���΄ա���ˣ��lչһ�N�߾������y�����g�ɞ��ˮ�ǰ�L���y��ԇ���������������L����ԇ��ʯӢ���Ӌ��y��0.2k Pa-2k Pa֮�g�ĉ������L���Мy�������cһ����ռ��g�ĉ����y���IJ�e�ǣ� (1) Ҏ��Ҫ���^һ�l���L�ܵ�ͨ�����y������̎������ԇ��ùܵ��L��1.3m���ȏ���0.9mm����Ҏ�y�����Ҏ�ܹܵ��Ƕ̶��֣����L�ܵ�������һЩ���}�� (2) �L���y��������Ҫ�y�������ķֲ������ж��c����Ҫ�y���������OӋ֮�y���c��32���c�����ľ����о����L�ܵ������c�yԇ�ķ�����
1�����Ӌ���x��
�����ڱ��������y���������L���y�������Ӌ�б�Ĥ���Ӌ������Ӌ��ʯӢ���Ӌ���x��ĤӋ�ľ��ȸߣ�����̽�^�w�e��ͬ�S�����a��̽�^��ֱ����ͬ����s��60mm�������32��̽�^�b��һ����ռ���g̫�����㡣����Ӌ�Dz��ý^�������������Ӌ���ɜy��0.1k Pa-100k Pa�ĉ������ڜy����������ԓ�{�����c�ԜpС�y���`������L���y�����y���{�����c��ʯӢ���Ӌ�����c�ǂ������w�eС���y�����ȱ��^�ߡ����^������ʯӢ���Ӌ߀�Ǻ��m���x���������õ����Ӌ����ʯӢ���Ӌ��ʯӢ���Ӌ�ڜy������100Pa�ĉ��������Բ������c�{�����`����С��10%��
2��ʯӢ���Ӌ��32ͨ�����Ӌ�OӋ����
���������o50�����D.J.Pacey�о���ʯӢ����y�����w����[1]��ԓ�x���ɜy10Pa��133Pa�ĉ�����80���M.Ono�����OӋ�˜y��������13.3Pa��10Pa��ʯӢ���Ӌ[2]��������90���Ҳ����������ʯӢ���Ӌ[3]���y��������0.1Pa—2×10Pa��Ŀǰ����ʯӢ���Ӌ�aƷ�����磺CC-10���Ӌ[4]��DL-10A��ʯӢ���Ӌ[5]�������������Ӌ��DL-10A��ʯӢ���Ӌ���y��������0.5Pa-10Pa��ʯӢ����ߴ��3.2mm×1.5mm×0.8mm������˷Q�l����32.768k Hz����С��8k PaУ�ʽY�����±�1��ʾ��
��1 ʯӢ���Ӌ�˶��Y��

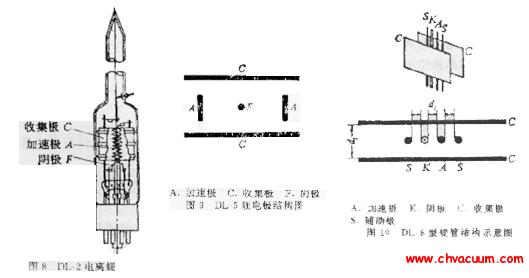
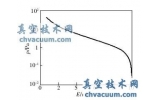
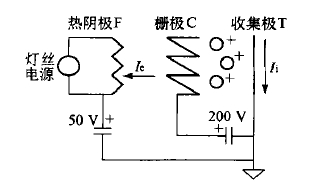
����ʯӢ���Ӌ�Ĺ���ԭ����ʯӢ�������C��r늌W�迹�c�܇����w�������P��DL-10A�����Ӌ�����c�迹���Pϵ��D1��ʾ��
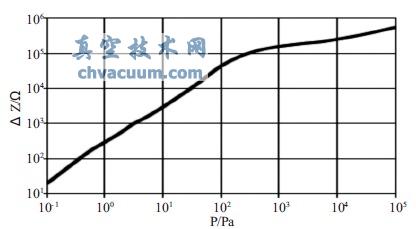
�D1 DL-10A�����迹�c�������Pϵ
�����D1������ΔZ���C���迹Z�c�����迹Z0֮������迹�lj����hС������С��10Pa���迹���迹�ɾ���ɶ˵�늉������^��������Ӌ��ó����迹�Ɇ�Ƭ�C�Q��ɉ���ݔ�����L���y�������ǜy32��λ�õĉ���ֵ����32�������b��һ�����əC���У�Ҋ�D2��ÿ·��һ������32·�����^32����·���^��32�����L�ܵ�ͨ��32̎���y��������λ�á�����y���·����·��늉�������͵��yһ�����ذ壬ԓ���ذ����32����ͬλ�õĉ���ֵ�����L���y���У�������͜y��������100Pa���������Ҫ���c�{����
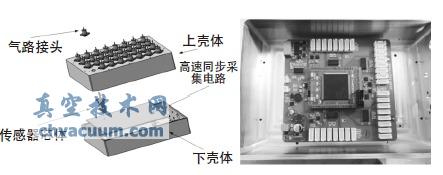
�D2 ���b����ļ��əC��
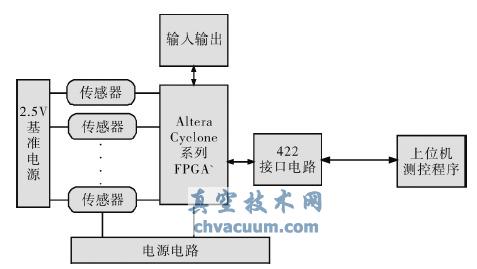
�D3 �ɾ��·ԭ��D
�������y��ϵ�y�����ɾ��·����Ҫ���ܞ飺��������ṩ12V��5V�߾����Դ;ͬ���c32·�������M��SPIͨӍ���ɼ�����������;�����������������������422�����l������λ�C���ɾ��·��Ҫͬ�r��32·�������M��SPIͨӍ���΄շdz����أ���ҎMCU�o���M������������x��FPGA�M�Ќ��F��FPGA���_�࣬�����F��Ҏģϵ�y���Ҹ����_��ͬ߉���Բ��Ј��У���ͬ�r̎����ͬ�΄ա�RS422ͨӍ����MAXIM��˾��MAX490����f�h�D�QоƬ���·�OӋ�^���п��]���L�����εȵ͚≺�h��ʹ�ã��M������ʹ��늽���ݵȰ������b���w�����Ԫ������
3�����L�ܵ���ʯӢ���Ӌ�x����Ӱ�
�������L�ܵ�������ʯӢ���Ӌ�Ĝy�����ڕr�g��������;����½��Ć��}������քe�M��ӑՓ��
����3.1�����L�ܵ�ʹ�r�g��������
���������L�����y���^�̣������L��·�������L��·���ģ����D4��ʾ�����L��·�����w�����Ӿ���һ������K���á����^���f���������w�����Ӷ���һ����ͨ���������@�N�����Q֮�������������Ĵ�С�f���ڹ�·Ԫ���ɶ˵ĉ�����һ���ėl����������·Ԫ���Ě������Ķ��١����w�ڹܵ��е����Ӡ�B��ͬ���ܵ�������Ҳ��һ�ӣ�Ҳ�����f���ܵ������w���������Hȡ�Q�ڹܵ��Ď��Π�ͳߴ磬߀�c�ܵ������ӵĚ��w�N͜ضȡ��ܵ��К��w��ƽ���������Pϵ��������Ӌ��ܵ������w�������r�����ȱ�������ܵ��еĚ�������һ�N���Ӡ�B��Ԕ�����㷽�����2��ʾ�����������Д�ԭ�t�����n�}���о����y������ճ����������
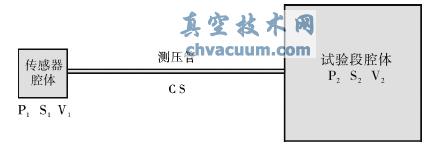
�D4 ���L��·���ģ��
��2 ���ϵ�y�����w���Ӡ�B
����ճ�������A�ܕr��������
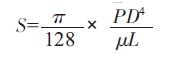
����ʽ�У�S———������m/s��
����———�܃�ƽ��������Pa��
����R———ͨ�Ú��w����R=8.31KJ/ (kmol·K)��
����T———�^���ضȣ�K��
����M———���w��������kg/kmol��
����L———���L�c�ܼ��Į����L��֮�ͣ�m��
����D———�܃��Lֱ����m��
����μ———�ȣ�Pa·s��
������Ҋ�����c��·ֱ��D�Ĵη������ȣ��c�L�ȳɷ��ȣ��cƽ�����������ȡ���ˣ��L���y������й��^������·�^�L�����y�����^�ͣ��������¹�·�������ӣ���·���ٽ��ͣ��Ķ�Ӱ표y��ϵ�y��푑��r�g���y�����ȡ�
�������о����L�ܵ�Ӱ푣���yԇ�b����D5��ʾ��
�D5 �����L�ܵ���DL-10A���ܜyԇ�b��
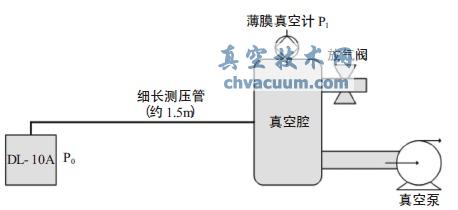
����DL-10A��ָʾ������P0���ܵ��ڵĉ�����P1���ɱ�Ĥ���Ӌ�y�����{�y�T�����{��P1�ĉ���ֵ��ϵ�y���Cе���Ś⡣����ùܵ��L1.5m���܃�ֱ��0.9mm�Ĺܵ������ڼ��L�ܵ��Ĵ��ڌ���Ҏ��̎�ĉ�����ۙ�ܿډ������ٶ�׃������P1�h����P0�r��P0�����J���ǙCе��ͨ�^�ܵ���Ҏ���ij��Y����P0�S�r�gt��׃���ɱ�ʾ�飺P0=P.exp (-t/t0)
����ʽ��P��t=0�r�ĉ���ֵ��t0=V/C�ɷQ��r�g���������lj�������ԭֵ��1/e����ĕr�g�������ɹ�ӋҎ��̎�����S�r�g׃���Ŀ�����ʽ��V��Ҏ�ܵ��w�e��C�齛�^�ܵ���Ҏ�ܵ���Ч���١�
�����L�������r��ԇ��������������������3000Pa���˕rģ�͜y���c������ԇ�Ή������������������ǙC����ģ��Ͷ�ţ��˕r�����鱻�y��������ģ�M������B���������Ȍ��D5��ʾ���ǻ�����{����3000Pa��Ȼ������_����ձÌ����ǻ������250Pa���Ķ��@ȡ���뼚�L��·����ϵ�y푑����� (Ҋ�D6) �����y�ùܵ�ֱ��0.9mm���L�Ȟ�1.5m�r��t0ֵ��40�롣����ܵ��L�ȜpС��15cm��ֱ���Ԟ�0.9mm���y��250Pa�����r��t0ֵ��15�롣
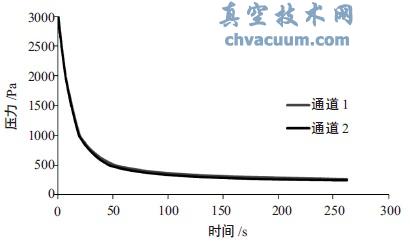
�D6 ���뼚�L�ܵ������y��ϵ�y푑�����
����3.2�����뼚�L�ܵ���ϵ�y�y�����Ș˶�
�����{���D5��ʾ�yԇϵ�y���ǻ��������3��ʾ���˜�ֵ�����^�L�r�g�������xȡ���y��ϵ�y�Y�����Ķ��z�y���y��ϵ�y�����y���`�ԇ�r�l�F����ʹ�����Ӌ���Sԭʼ�����r�����뼚�L�ܵ����ڵ���300Pa�y���r�������^���`�����ʹ�ü��L�ܵ��r�`������S�ɷ����ȡ���������ʯӢ���Ӌ�����þ��w�ڽ��|�h������ʎ�����Թ��������|�ɷֵĸ�׃���a���^���`��������ǻ���ɼ��L�ܵ�����Ч��׃����������ǻ�wጷŵĚ��wռ���^��׃�˽��|�h������ˣ��҂��ڼ��L�ܵ��l��������������ԭʼ�����M�������yȡ�����d�����y��ϵ�y��ʹ���µ�ԭʼ���������y��ϵ�y�˶��Y�����3��ʾ���`����ڜy��ֵ��15%�ԃȡ�
��3 ���y��ϵ�y�˶��Y�� (�`����������ڜy��ֵ�İٷֱ�)

4���L��ԇԇ�Y��
����4.1��ԇ��O��
����ԇ��о��������Ї�����՚�������g�о�Ժ��FD-07��Ҏ�߳����L������ɵģ�ԓ�L���Ǖ��_����������������ʽ�߳����L�����Կ՚�鹤�����|��Ŀǰ�\�е�Ma��������4~10�����ø��Q���ܵķ�����׃Ma����
����4.2��ԇ�ģ��
�����L���y��ϵ�y��D7��ʾ��ԇ�ʹ�ô��g�^�wģ�ͣ���ģ������ˮƽĸ���Ϸքe�����傀�y���c (�ɗlĸ���քe��φ=90°��φ=270°��ʾ) �����P䓜y����ͨ�^肉K�cģ�ͱ���y�������B�����^֧�U��ǻ���������˱M�����Ӝy����·�⏽���pСϵ�y���t���ڝM���·���ܜض�߅��ėl���£��M���p���˲��P䓹�·�L�ȣ�ʹ�����ķ���ϩ��·�M���D�ӡ����ķ���ϩ�D��Ҳͬ�r���Ӝy����·�����g�ȣ����ڹ��ǙC�����������P䓹�·�ȏ�0.9mm���⏽1.2mm�����ķ���ϩ��·�ȏ�1.2mm���⏽1.6mm����·�D��̎ͨ�^����zˮ�M���ܷ⡣
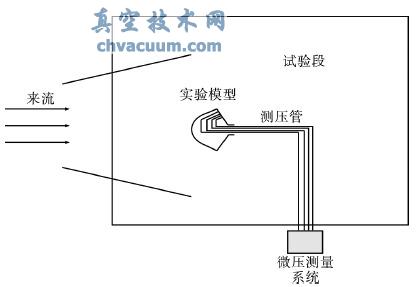
�D7 �L���y��ԇ�ʾ��D
��4 ԇ��B����������

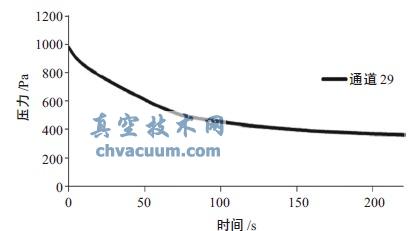
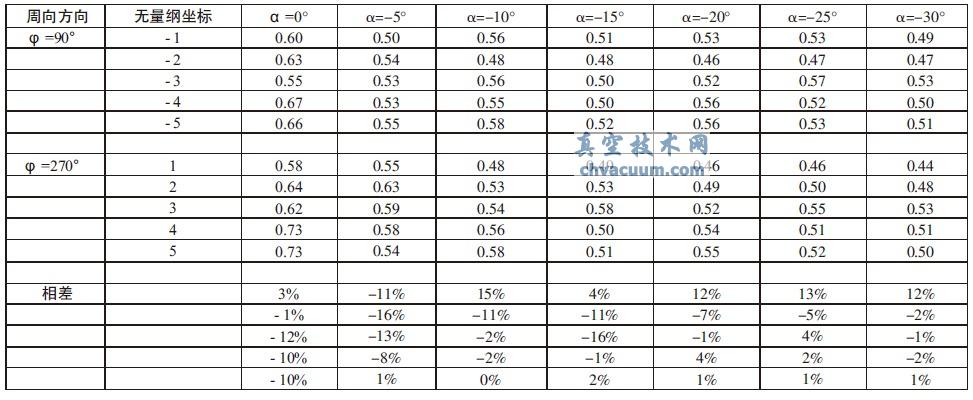
�����L���y��ԇ�Y����D8����4����5��ʾ���D8���29ͨ�����y���������L���\�Еr�L�ɳ��ܷ����ȣ����^���L�ܵ��ĉ��������_���ӽ�ƽ���B����4����5�鲻ͬ�R�Ք��l���£�φ=90°ĸ����φ=270°ĸ���ϵĜy���Y��������ģ�͞��S���Q���Σ���φ=90°�cφ=270°��Փ������ԓ����һ�¡����Կ������y�É�������300Pa��800Pa֮�g���ɗlĸ���Ϝy�c�������Q���^�ã��������15%�ԃȡ�
�D8 Ma8�L���y������
��4 Ma5����ͬ�����y�õĉ���

��5 Ma8����ͬ�����y�õĉ���
5���Y
����ʯӢ��Ղ����������L���������w�eС���y�����ȸߵ����c���������L���Мy������Ҏ��Ҫͨ�^���L�ܵ�ͨ�y����̎��
����(1) ���^���L�ܵ��r�g���������ѽӽ��L�����֠�B��ʹ�ØO�ޣ�����̎�ڿɽ��ܷ����ȣ����mģ���OӋ�Б��M���pС�ܵ��L�ȣ����ӹܵ��ȏ���
����(2) ����ʯӢ���Ӌ��С�����y��ϵ�y���ȿ��_�y��ֵ15%���ϣ������ڳ�Ҏ�߳����L��С�����y��ԇ
����ͨ�^�����·�Y���������Mһ������pС�������w�e����1.2�������L���O����ֱ�ӌ����������b��ģ�̓Ȳ����@���O��̶ȜpС�y����·�L�ȣ����͉���푑��r�g����ߜy�����ȣ�����������m�����о��ķ���
�����īI
����[1]Pacey D J.A piezoelectric oscillator manometer[J].Vacuum��9 (1959) ��261-263.
����[2]M.Ono��etc.Design and performance of a quartz oscillator vacuum gauge with a controller��J.Vac.Sci.Technol.A 3 (3) May/Jun 1985��1746-1749.
����[3]������늣������У���.ʯӢ��������������Ӌ������[J].�����Ӽ��g��1995��(5) ��17-20
����[4]TLEVAC CC-10 Wide Range Vacuum Gauge[Z]
����[5]DL-10A��ʯӢ���Ӌ[J].���2014��7��51 (4) 35-37
����[6]�����£���ο���O��������.����ʯӢ���Ӌ�ij�Ҏ�������L��С�����yԇϵ�y����[C].���ݣ���ʮ�ˌ�ȫ���߳��ٚ����/��W�g��������2016��11�£�P.223.