�����řC����Ք�·���ӑB�����c���
���������о���·���֡����l�^�̵ĄӑB���ԣ��P��ᘌ�һ�_�����ŲلәC������Ք�·��������̓�M�әC���g�����˔�·���Ą����Wģ�ͣ��ƌ���ģ�̈́����^�����M����\�ӷ��̼�늴ŷ��̣�����Ք�·���ķ��l�����l�ӑB�^���M�з�������c���ȡ�����͌��Y��������ģ�͵ĄӑB���ԝM���·���ļ��g������������Ҫ���о���·���ă����OӋ�����\���ṩ��������
��������
������·�������ϵ�y������ƺͱ��o���õ���Ҫ�O�䣬�乤�����܌�늾W�Ŀɿ��\�о�����Ҫ��Ӱ푡�Ŀǰ�ڇ��ȣ�һ�N늴Ųلӡ������ֵ����řC���яV����������Ք�·���I���c���y�لәC����ȣ����řC�����нY�����Ρ����ܺ߿ɿ��Ե�ͻ�����c��Ȼ�������řC���ĄӑB�^�̱��^���s�����HҪ�о��֡����l�^�����\�Ӳ����ęCе����׃����߀Ҫ���]�C����늴���������Ȧ�����ϵ�y��朵ȅ���֮�g�ĄӑB����Pϵ����ˣ��������řC���ĄӑB���Ԍ����о���·���������ܺ����늾W�����Ծ�����Ҫ�����x��
����̓�M�әC���g�ǻ��ڶ��wϵ�\�ӌW�c�����W��ģ��Փ�����M�ж��I�����ľC�ϑ��ü��g��ͨ�^��̓�M�h���н�����ȫ�������Ĕ�·��ģ�ͣ���ģ���M�ЄӑB���棬���ԫ@�Ô�·���\�Ӳ�����ͬ�r�̵�λ�á��ٶȵȅ������Ķ�ֱ�^���ʴ_�ķ�����·���ĄӑB���ԡ�������̓�M�әC�ӑB���漼�g���A�y��·���لәC���Ĺ��ϡ����U����̓�M�әC���g�ڔ�·���ĄӑB�����Լ��OӋ�I���еđ��á�
�����P����һ�_��η��B���řC������Ք�·�����о�������̓�M�әC���g�����˔�·��ģ�ͣ�����·���ķ֡����l�ӑB�^���M�з�������������әC�M�Ќ���Ա��C����Y���Ĝʴ_�ԺͿ����ԡ�
����1����·��ģ�͵Ľ����c�\���^�̷���
����1.1����Ք�·��ģ�͵Ľ���
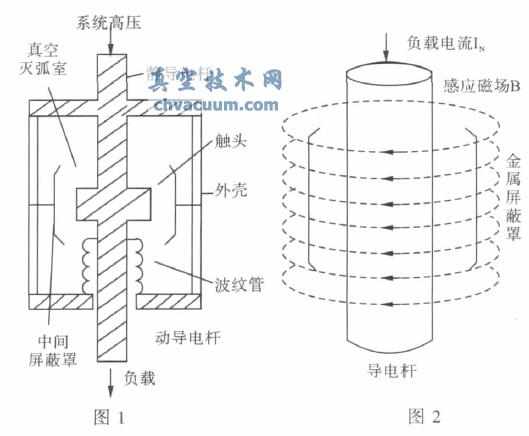
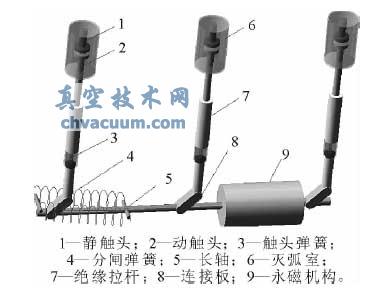
�������еķ��挦���ZW45-12 �͑�����Ք�·������·�����w�������O֧��ʽ�Y�����_�P���w���õ��������řC������Ք�·������·������Ҫ���g����Ҋ��1��
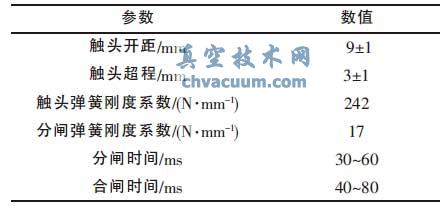
��1 ��·������Ҫ���g����
�����P�߲��ö��w�����W����ܛ��ADAMS �����Ĕ�·��ģ��Ҋ�D1������ʹ������ģ���ܜʴ_�M�ЄӑB���棬����ڸ�������֮�g���Ռ��H������r���Ӽs���Pϵ���d�ɡ���·�������r���L�S����ˮƽ�\�ӣ���Ҫ����ˮƽ�����Ƹ������|�^�����Qֱ�\�ӣ��������Qֱ�����Ƹ���
�D1 ZW45-12 ����Ք�·���ķ���ģ��
�����L�S�c�B�Ӱ塢�B�Ӱ��c�^�����U֮�gҪ�������D�����ڌ��H�����Д�·���\�Ӳ���֮�g����Ħ������Ҫ���\�Ӹ��϶��xĦ���������⣬�m�������|�^���ɵ��A�������Ա�������_ʼ�r�����C�����������|�^���s�|�^���ɻ���ĬF��·��ģ�ͽ����ɹ���߀��Ҫͨ�^�Ď�ģ�ͅ���������Ħ�������x�����w�����M�d�ɺ����c���x���Ƶȷ������M�әCģ�ͣ�����M�Ѓ����OӋ��ֱ���õ��A�ڵĔ�·��ģ�͡����Ќ���·���әC�M�н�ģ�̓��������̈DҊ�D2��
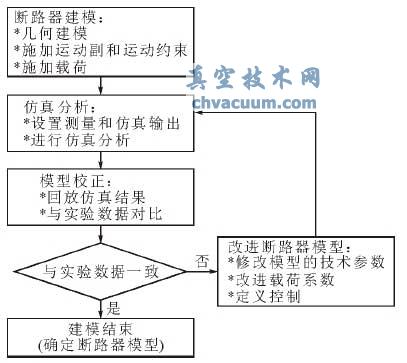
�D2 ��ģ���̈D
����1.2����·��ģ�͵��\���^�̷���
��������ԓģ�Ͷ��ԣ������řC���к��l��Ȧͨ늮a���ň��c���ô��F�ň��B�Ӯa����늴������Լ����l���������Ĺ�ͬ�����£����F�Ą�����ֱ���ӂ��әC�����L�S��ˮƽ�\�ӣ��B�Ӱ匢�L�S��ˮƽ�\���D����^�����U���Qֱ�\�ӣ��Ķ����ӄ��|�^�����������F��·���ķ֡����l��������·���ĺ��lλ�������ô��F���֣����lλ���ɷ��l���ɱ��֡������|�^�ȵĄ���ֱ�����L�S�Ƅ��B�Ӱ���ӣ��_�P�ڹ����r��Ҫ���\�Ӳ����٣����g�D�Q���B�ӵęC��Ҳ���٣��C�����\���^�̺��Σ����кܸߵĿɿ��ԡ����н�����Ք�·��ģ�͵��\�Ӻ��DҊ�D3��
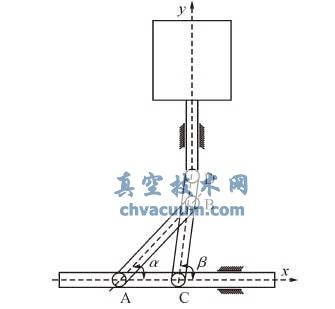
�D3 ģ�͵��\�Ӻ��D
����4���Y�Z
�����P����̓�M�әC���g����һ�_ZW45-12 �����řC��������Ք�·����ģ�͡��ƌ���ģ�ͷ֡����l�^�̵ĄӑB���̣�����õ���·���֡����l�^�̵ĄӑB����������������Y���c�������ȷ������ó����½YՓ��
������·��ģ�͵ķ֡����l�ӑB���Կ����_����·����Ҫ���g������Ҫ��; ����ģ�͵ĺ��l�r�g��54.6 ms���c����һ�£����|�^���l�����r�g��1.5 ms�����U�ĺ��l������ֵ��0.36 mm����С�ڌ���;����ģ�͵ķ��l�r�g��39.7 ms�����U�ķ��l�^�_��1.45 mm���c����һ��;ͨ�^�����C�˷���Y���Ĝʴ_�ԣ������̓�M�әC���g�о���·���Ĺ����\��̓����OӋ�ṩ��������