������������Ք�·�����l���Ʒ���
������pС������Ք�·���ֺ��l�r�g�ķ�ɢ�ԣ�����������r���|�^���\�����ԣ������׃늉�׃ݔ������(VVVE)�����������������_�h���ƕr���řC���ľ�Ȧ������ԣ��o��������ĔM�Ϸ��̼���������ă����������ڱ������ݔ��������׃����r�£�ͨ�^��Ƹ�׃������ݳ�ʼ늉�(VV)�ęC�ƌ��F����·�����l�r�g�Ĵ��{��ͨ�^��׃���ݔ������(VE)�Լ���Ʊ�����ݳ�ʼ늉���׃�ęC�ƌ��F�����l�r�g���{�����ø��M�͜��h���Ƶķ��������ƾ�Ȧ����c��������һ�£����F�ˌ���·�����|�^�\�����Եă������������������OӋ�������Ŀ��������ڲ�ͬ����ݳ�ʼ늉��£���12kV������Ք�·���M���˺��l�����Y��������������ĺ��l�r�g��ԭ�_�h���Ƶĺ��l�r�g�s���˼s4ms����ƫ��≤0.3ms;���|�^�Ą����ٶȱ�ԭ�~���_�h���ƕr������5%����ˣ�������ķ����܉�ʹ���l�r�g�������õ�һ���ԣ��ӿ��˔�·���ĺ��l�^�̣��������|�^��ײ�������^��ظ����˄��|�^���\�����ԡ�
����ͬ���P�ϼ��g(���x���P�ϼ��g)���䌍�|�Ǹ�����ͬؓ�d�����ԣ������_�P��늉���������������λ�c��ɺ��l����l������ͬ���P�ϼ��g������Ч�����ֺ��l��������IJ����^늉���ӿ����������ϵ�y�ɿ��Ժ��Ñ�����|����Ҫ���Fͬ���P�ϣ�����ҪӋ�㲢�A�y늉�(���)����λ���_�����l(���l)����Č��H���Еr�g�������^���īI�o����������Ӌ�㷽��;��Σ�Ҫ��pС�C�������r�g��ɢ�ԣ��@�nj��Fͬ���P�ϵ��y�c���ڡ����y��·���لәC��������ɢ�Դ��\�ӿɿ��Բ푑��ٶ�����ʹͬ���P�ϼ��g�İlչ�ܵ������ơ�
�������řC����·���ij��F�錍�Fͬ���P���ṩ�˼��g���A���c���y���əC����·����ȣ����㲿���١�������ɢ���^С���\�пɿ��Ըߡ�Ȼ�������ŲلәC����������������ܜض�Ӱ푣�늉�����������Ȧ����ʕ��l��׃������˕����һ���̶ȵĄ�����ɢ�ԡ��@Щ���،����l�r�g��Ӱ��ǷǾ��Եģ��y���þ��_�Ĕ��Wģ����������ˣ��ܶ��īI�����W�j�A�y��������Ӱ��µķֺ��l�����r�g�����a��������ɢ�ԡ�Ȼ���������ڲ����^���Є��|�^���\���^�̲��ܿ��ƣ�������\�����Բ������룬���F��ֺ��l���w�r�g�^�L�������ٶ��^�ߵȡ���@�ø��õĄ��|�^�\�����ԣ��īI����˻��ڄ��|�^λ���]�h���ƵĿ��Ʋ��ԣ��īI�Mһ����������m��λ���]�h�Ŀ��Ʋ��ԣ�ȡ�������õĿ���Ч����Ȼ�����@һ����ڔ�·���ı��w�C���ϼ��b��λ�Ƃ��������������������ɿ��Բ��ߣ��ֺ��l�r���|�^�Ŀ����\���Լ�������ɕr�Ą��|�^�Eͣ�ȕ����������ĉ����a���ܴ�Ӱ푣���λ�Ƃ������İ��b�̶�Ҳ�^�y������������䌍���ԡ�
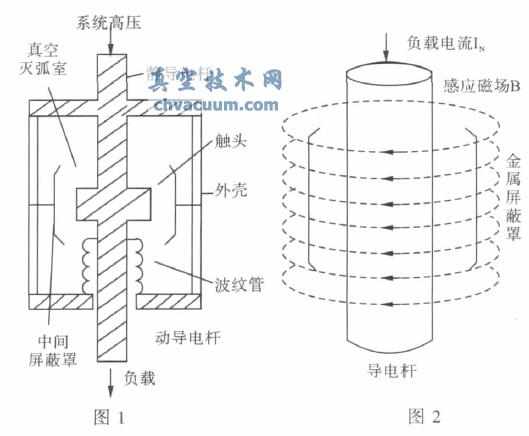
������˷����������y�c��������12kV�η��B��Ք�·�����l�����������˺��l�r�ľ�Ȧ������Σ�ͨ�^�����M�ϵķ������o���˺��l��������̣���ͨ�^׃늉�׃ݔ������(varying voltage and varyingoutput energy��VVVE)�ķ����������|�^�\�������M�Ѓ�����ͨ�^��Ƹ�׃��ݳ�ʼ늉�(varying initialvoltage��VV)��ԭ��팍�F�����l�r�g�Ĵ��{��ͨ�^��Ƹ�׃���ݔ������(varying output energy��VE)��ԭ��팍�F����·�����l�r�g���{;�Y������]�h���Ʒ�������Ч�����˔�·�����|�^���\�����ԡ�ԓ�������H�ܱ���������Ք�·���ĺ��l�r�g�㶨��߀�ܜpС���l�r�g�����Ƅ����ٶ��ԜpС���|�^����ײ������
����4���YՓ
����1)�郞����·�����|�^���\�����ԣ����������������Ք�·�����l����������ԓ�����܌���·�����l�r�g�M�д��{���{������˔�·�����|�^���l�r��ƽ���ٶȣ�����Ч�����˄����ٶȣ����o�˄��|�^��
����2)ͨ�^���rӋ���·�����l�r���xȡ��kֵ��ηֵ����������������VVVE����Ӌ�㷽����Ӌ��������̵ą��������Ԍ��F��·���l�r�g���ھ��a����ʹ������Ք�·���ڲ�ͬ���r�µĺ��l�r�g���ֺ㶨��