�������SCADģ�͵ď�(f��)�s�Cе�O(sh��)����b�����T��(d��o)ϵ�y(t��ng)
�����錍�F(xi��n)��(f��)�s�Cе�O(sh��)�����S�O(sh��)Ӌ�c��ж���b�����S�T��(d��o)��һ�w��������˻������SCADģ�͵ď�(f��)�s�Cе�O(sh��)�������F(xi��n)�����b�T��(d��o)��ܣ�����ԓ�������˻��ڲ��b��(y��u)���P(gu��n)ϵ�ӾW(w��ng)�j(lu��)ģ�͵IJ��b����T��(d��o)������ԓ�����ڳ�ʼ���A���Ԅ����ɘ����b��(y��u)���P(gu��n)ϵ�ӾW(w��ng)�j(lu��)ģ�ͣ����O(sh��)����b�^���и���(j��)�����ߵIJ��b�����ھ�Ҏ(gu��)�����b�������ݔ�����P(gu��n)�T��(d��o)��Ϣ������˻���ҕͶӰԭ�������S�T��(d��o)���������c�@ʾ�������܉����(j��)���b������㲿�������еijߴ磬����ҕͶӰԭ�팢̓�M�T��(d��o)������λ����������(bi��o)ϵ�У�ʹ̓�M�T��(d��o)�����Ժ��m��ҕ���@ʾ����Ļ��ָ��λ���ϣ���������S��Ϣ�@ʾ��ֱ�^�ԡ��������ԭ��ϵ�y(t��ng)����C��������Փ�ͷ����Ŀ����ԡ�
��������
�����S�����g(sh��)�İl(f��)չ���F(xi��n)�����͏�(f��)�s�Cе�b��(����N�l(f��)�әC)�IJ�ж���b�乤ˇ��څ��(f��)�s�������ˆT�μ�����������(j��ng)���g(sh��)��֪�R�y�Ը�Ч����ɏ�(f��)�s�Cе�b��IJ�ж���S���b�䡣���|(zh��)����Ӽ��g(sh��)�փԮ�(d��ng)ǰ���V�����ڴ惦����ԃ���b�S��ˇ�ͼ��g(sh��)��Ϣ����ʹ���^���в�������߅�����O(sh��)��߅�քӲ鿴�փԣ������y�ȴ���Ч�ʵͣ�����ע������Ҫ���փԺ��O(sh��)��֮�g�l���ГQ�������܇��h(hu��n)��Ӱ푣��Ķ���ɲ��b�S���e�Ȇ��}�����������Ҫһ�N�µķ�ʽ���������������ݔ��������Ϣ���T��(d��o)����ɮ�(d��ng)ǰ�IJ��b�S������
���������F(xi��n)�����g(sh��)����̓�M�F(xi��n)�����g(sh��)�Ļ��A(ch��)�ϰl(f��)չ�����ģ����܉�?q��)�Ӌ��C���ɵ�̓�M��Ϣ�B���@ʾ���挍�����ϣ�ʹ�Ñ�����һ��̓���ںϵĭh(hu��n)���������F(xi��n)�����g(sh��)�ڙCе�O(sh��)����b�S���T��(d��o)�о��ЏV���đ�(y��ng)��ǰ���������ˇ���(n��i)�����ҕ���ѽ�(j��ng)�_չ���о�����STARMATE(system��using��augmented��realityfor��maintenance��assembly��training��and��education)ϵ�y(t��ng)�����m���Ҽ��g(sh��)�о�����(���QVTT)ϵ�y(t��ng)��ARMAR(augmented��relity��for��maintenance��and��repair)ϵ�y(t��ng)��MOON(assembly��oriented��authoringaugmented��reality)ϵ�y(t��ng)�ȣ��տ�܊���w�C��˾�ѽ�(j��ng)�������F(xi��n)�����g(sh��)��(y��ng)����A400M ܊���\ݔ�C�����T��(d��o)��;Webel��Ҳ�ь������F(xi��n)�����g(sh��)��(y��ng)�õ��a(ch��n)Ʒ�b�似����Ӗ(x��n)�С���Щ�����(n��i)Ҳ�_չ�������F(xi��n)���b�����P(gu��n)���о��������G�Ȍ��Ӵ���ɫPetri�W(w��ng)�c�D�`�Cģ�ͽY(ji��)�ϣ������һ�N�����F(xi��n)���b��h(hu��n)��ϵ�y(t��ng)ģ�ͣ��^�õ؝M���������F(xi��n)���b��ϵ�y(t��ng)�ĄӑB(t��i)���r푑�(y��ng)Ҫ��;��������о��������F(xi��n)���h(hu��n)���µĮa(ch��n)Ʒ�b������(d��o)���g(sh��);�w���Ș�(g��u)����һ���b��S��Ӗ(x��n)���������F(xi��n)��ϵ�y(t��ng)�����˙C�����^���в����o�B(t��i)��(bi��o)־�̈́ӑB(t��i)��(bi��o)־��Y(ji��)�ϵķ�����ͨ�^���ֿ��ƄӑB(t��i)��(bi��o)־���|�l(f��)���dȤ�ă�(n��i)�ݣ���ɾS���������F(xi��n)�еĻ��������F(xi��n)�����g(sh��)�IJ��b�S��ϵ�y(t��ng)����“��Ӌ��C������”�ij�������(d��o)ϵ�y(t��ng)�����m������H���F(xi��n)��̓�M��Ϣ���挍�����������F(xi��n)���B�ӣ���δ�_���T��(d��o)�ČӴΣ���ʹ���в�������Ҫ�Լ��R�e���b�΄�(w��)����ͨ�^�քӲ���Ӌ��C�O(sh��)����Z���R�e�ķ�ʽ�Ĕ�(sh��)��(j��)����������ǰҎ(gu��)���õ���Ϣ���@�Ӳ��H���m�������s�ĭh(hu��n)�������ҷ�ɢ�˲����ߵ�ע���������m���ܲ��(d��ng)ǰ���SӋ��C�o���O(sh��)Ӌ(Computer��Aided��Design��CAD)ܛ�����ڮa(ch��n)Ʒ�O(sh��)Ӌ�еõ��ƏV�͑�(y��ng)�ã�����܉����������F(xi��n)�����g(sh��)����(f��)�s�Cе�O(sh��)������SCADģ�͑�(y��ng)����ԓ�O(sh��)��IJ��b�S���T��(d��o)����Ӗ(x��n)�У����F(xi��n)���S�O(sh��)Ӌ�c��ж���b�����S�T��(d��o)��һ�w�����،��������߮a(ch��n)Ʒ�ĸ���ֵ����܊���b��(���w�C��Ş�����b��)�S����Ӗ(x��n)�͑�(zh��n)�r�����I(l��ng)����ЏV���đ�(y��ng)��ǰ����
�����b�ڴˣ�����ʹ�������F(xi��n)�����g(sh��)������������SCADģ�͵ď�(f��)�s�Cе�O(sh��)�������F(xi��n)�����b�T��(d��o)��ܣ�ͨ�^�o�����l�R�e(Radio��Frequency��Identification��RFID)��λ�ø�ۙ�O(sh��)���R�e�����ߵIJ�ж���b���M��;����(j��)�a(ch��n)Ʒ�����SCAD�b��ģ�����ɲ��b��(y��u)���P(gu��n)ϵ�ӾW(w��ng)�j(lu��)ģ�ͣ��������ڲ��b��(y��u)���P(gu��n)ϵ�ӾW(w��ng)�j(lu��)ģ�͵IJ��b����T��(d��o)�������Ķ�����(j��)��(d��ng)ǰ�IJ��b�M�̡����b��ˇ�Ͳ����ߵIJ��b�vʷ�ھ�����������]��һ����Ҫ���b���㲿�������F(xi��n)���b���Ͳ��b��ˇ������ݔ�͡��������ҕͶӰԭ�������S�T��(d��o)���������c�@ʾ������ԓ��������(j��)���b������㲿���İ����гߴ磬����ҕͶӰԭ�팢̓�M�T��(d��o)������λ����������(bi��o)ϵ�У��Ķ���̓�M�T��(d��o)�����Ժ��m��ҕ���@ʾ����Ļ��ָ��λ���ϡ�
1����(f��)�s�Cе�O(sh��)����b�T��(d��o)ϵ�y(t��ng)���
�����ں��m�ĕr���Ԅӡ���(zh��n)�_��ݔ�Ͳ���������T��(d��o)��Ϣ���nj��F(xi��n)“���˞�����”�IJ��b�T��(d��o)���P(gu��n)�I֮һ����˲��b�T��(d��o)��Ϣ��������Ҫ�C�Ͽ��]�a(ch��n)Ʒ��(d��ng)ǰ�IJ��b�M�̡����b��ˇ�Ͳ����ߵĂ��w���b����ȣ���˱����������D1��ʾ�ď�(f��)�s�Cе�O(sh��)����b�T��(d��o)��ܡ�
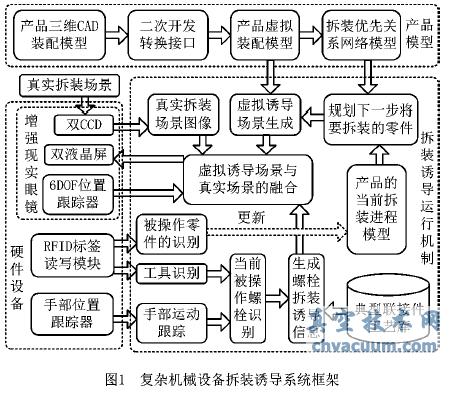
����ԓϵ�y(t��ng)��Ӳ���������ڲ������۾�ǰ���������F(xi��n)�����R�����ڲ������ֲ���RFID�x���O(sh��)�䡢�ֲ�λ�ø�ۙ�O(sh��)�䣬�Լ��N������Ͳ��b�����ϵ�RFID��(bi��o)����ԓ�T��(d��o)����Ԯa(ch��n)Ʒ���SCAD�b��ģ�͞���A(ch��)��ͨ�^��CADϵ�y(t��ng)�Ķ����_�l(f��)���a(ch��n)Ʒ��CADģ���D(zhu��n)����̓�M�b��ģ�ͣ����T��(d��o)ϵ�y(t��ng)��ʼ���A�μ��d̓�M�b��ģ�ͣ����ɘ����b��(y��u)���P(gu��n)ϵ�ӾW(w��ng)�j(lu��)ģ�͡�ͨ�^RFID��(bi��o)���x���O(sh��)����ֲ�λ�ø�ۙ���R�e�����������M�еIJ��b���������Ԅ���������(y��ng)�IJ��b�T��(d��o)��ˇ;���b������ɺ���®a(ch��n)Ʒ�IJ��b�M��ģ�ͣ��Ա��_�a(ch��n)Ʒ�Į�(d��ng)ǰ���b��B(t��i)��ϵ�y(t��ng)���Ը���(j��)�a(ch��n)Ʒ�IJ��b��(y��u)���P(gu��n)ϵģ�ͺͮ�(d��ng)ǰ�IJ��b�M��ģ�ͣ����@ʾ��Ļָ���^(q��)���������S�D�Ρ��Ӯ������ֵ���ʽ�����������ʾ��һ��Ҫ���b�����������b��ˇ�ȡ�
2���Y(ji��)���Z
�������Ļ��������F(xi��n)�����g(sh��)���о��˻������SCADģ�͵ęCе�O(sh��)����b�T��(d��o)ϵ�y(t��ng)���o�����T��(d��o)ϵ�y(t��ng)��ܣ�����˻��ڲ��b��(y��u)���P(gu��n)ϵ�ӾW(w��ng)�j(lu��)ģ�͵IJ��b����T��(d��o)�����ͻ���ҕͶӰԭ�������S�T��(d��o)�����������c�@ʾ��������ͨ�^ԭ��ϵ�y(t��ng)��C��������ԡ����о��������Փ�ͷ������H���F(xi��n)�˙Cе�a(ch��n)Ʒ���SCADܛ���O(sh��)Ӌ�c��ж���b���T��(d��o)��һ�w�������Ҿ����^�õ����m�ԣ�����ڴ��͙Cе�O(sh��)��S����Ӗ(x��n)��Ӗ(x��n)����܊���b��ē����I(l��ng)����ЏV���đ�(y��ng)��ǰ���͑�(y��ng)�Ãrֵ��
���������O(sh��)Ӌ��ϵ�y(t��ng)ֻ��һ��ԭ��ϵ�y(t��ng)�����x���H��(y��ng)������һ���ľ��x�����S���g��λ������R�e�������F(xi��n)�����R�đ�(y��ng)���в����죬�˙C�������д����Mһ�����M��δ�����Բ���һЩӲ���O(sh��)�����ϵ�y(t��ng)���˙C�����ԣ���ԭ��ϵ�y(t��ng)���ֲ�λ�ø�ۙ���ֺ������F(xi��n)����ۙ���ֿ���ʹ�ó����O(sh��)�䡢GPS��ۙ�O(sh��)��ȴ���;�����F(xi��n)�����R���Բ��ßo��ͨ�ŵķ�ʽ�cӋ��Cͨ��;��������܉�?q��)��߾���λ�ø�ۙģ�K��RFIDģ�K���ɣ��O(sh��)Ӌһ���������w�R�e��λ�ø�֪�ğo��ģ�K���t�،����������T��(d��o)ϵ�y(t��ng)�Ŀɲ����Ժ��ֲ�λ�ø�ۙ�ķ�(w��n)���ԣ��@Щ����δ����Ҫ�о��ķ���