����AutoCAD��PUMA560�C�����\�ӌW�������
��������PUMA560 �ĽY�����c�������˙C���˵�AutoCADģ�ͺ�D-H ����ϵ�����ÙC����D-H ����׃�Q����������PUMA560 �C�����\�ӌW����Ĕ��Wģ�͡�����AutoCAD ƽ�_����������λ�ú��ˑB�M�Мy����ʹ�Ô��Wģ�ͺ�CAD �\�ӷ���õ����^ȫ������C�������I�C�����\�������о����зe�O���x��
�����C�����\�ӌW�ǙC���˼��g����Ҫ���ɲ��֣����\�ӷ�����܉�E���ƺ��x�����̵���Ҫ���A���\�ӌW�����о�������֪�C���˸��P�����\��׃����������(ĩ�ˈ���������)����������ϵλ�˵Ć��}��
1��CAD ģ���cD-H ����ϵ�Ľ���
����(1) PUMA560 �C���˵�CAD ��ģ
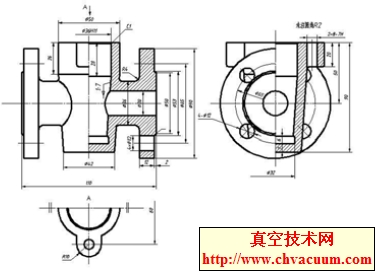
����PUMA560 �C�����əC��1 ��6 ����ӗU�����ɣ�����6 �����D�P����ʹ��AutoCAD ƽ�_�ṩ�Č��w��ģ�����w���Ͳ����\��ȹ��ܣ����Ժܷ���ؽ��������U���Č��wģ�K(��)�����������������b���Pϵ��λ�óߴ�����{���ÙC���˵ij�ʼ��B������λ���Pϵ����D1��
����(2)D-H ����ϵ�Ľ���
�����C������ϵ(X0Y0Z0)�B�ڙC��1 �ϣ��麆��Ӌ�㣬����ԭ�cO0ƽ�ƣ�ʹO0��O1�غϣ�������������ϵҎ�t��������ӗU������ϵ���D2 ���^�����һ�N��
����PUMA560 �C���˗U������ϵ��ԭ�t�������D��θi��Ť��αi���U�Lhi��ƫ��di 4 ������������������zi�Sȡ�U��i �c�U��i+1 �����S������xi�S�tȡ��������z �Ĺ��������U�Lhi����xi�S��zi-1�S��zi�S�ľ��x��Ҏ���cxi�S����һ�µľ��x������ƫ��di����zi-1�S��xi-1�S��xi�S�ľ��x��Ҏ���czi-1�S������һ�µľ��x������Ť��αi���@xi�S��zi-1�S��zi�S��λ�ƣ� Ҏ����xi�S�����^����rᘷ���Ľ�λ�ƞ������D��θi���@zi-1�S��xi-1�S��xi�S�Ľ�λ�ƣ�Ҏ����zi-1�S�����^����rᘷ���Ľ�λ�ƞ�����
4���Y�Z
����������PUMA560 �C���˵��\�ӌW�����CAD��ģ���c���Wģ�ͣ�ͨ�^AutoCAD ����ʼ���\�Ӻ�ķ���͜y����ʹ�����┵�Wģ���cCAD ģ�ͷ�����λ�ú��ˑB����õ����^ȫ������C�����C�����\�����ܺ��m�о��������зe�O���x��