�����ʽ�λ�O�y��ԭ���ͽY�������OӋ
���������������늵����o�λ�������o늷��(ESD)���Ķ�Ӱ������Ɖ��l������������o늷���¼�����c���N�������֮�g�IJ������P������о���ͬ��������ڿ��g�ij���λ���ڿ��ƺ����������o늷���¼����P��Ҫ�����Ľ�B�����ڜy�������λ���o늸Б�ʽλ�O�y���Ĺ���ԭ�������Ҍ�̽�^�����OӋ�������xȡ�M���˔�ֵģ�MӋ���о��������OӋ�������xȡ�̓�����
�����������o늷��(ESD)�c���N�������֮�g�IJ����������P�����Dz���ֱ����܉�y�����٣�Ŀǰֻ��ͨ�^������������Ϙ�Ʒ�O���y�����l���ϴ��d�^�ı����λ�������ЃɷN��͡�һ���늺ɰ������(CPA)������������d��INTELSAT ��������ӡ�ȵ�GSAT-2 �l���ϣ����l�DZ������O���̽�^������ݷ։�ԭ��y�����g�O�y�l����܉�������¼�����һ���������늈�������(SPM)�y������늈������͵���P78-2 SCATHA �ϴ��d�ı���늉��O�y��(SSPM)������ԇ��l��V ���d���λ�O�y��(POM) ��Defense Satellite��Communication System-III B7(DSCS-III B7)�������ϵı���늉��O�y��(SPM)��������Ҫ�о�SPM ��͵�̽�y����
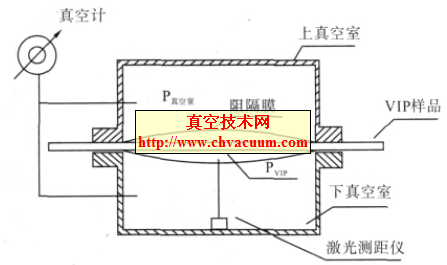
����1��SPM �y��ԭ��
����SPM �OӋ�п��]����Ҫ���ؾ��ǜy�����ܸ�׃���|�������۷e��늺ɣ���˸��迹늈����������Ѓ��ݣ��o�Ӌ����ø��迹늈�̽ᘡ�
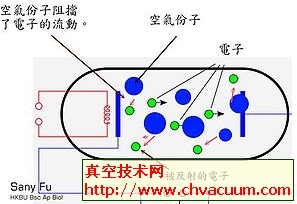
����������ʽ�x��̽�^늘O��һ������ӵĽ���Ƭ������ʎ�������£�̽�^늘O�c���y����w֮�g�����������׃�������y����w��̽�^늘O�ϸБ���һ��������׃�����λ��̖��������̖�dz������ʲ��ø���ݔ����迹������������̖���ٽ������Ŵ�������z�����@ʾ���y�λ��
���������_�����ľ��Ⱥͷֱ��ʣ��o�Ӌ��������ӷ����]�h����ϵ�yʹ��늈��Б�̽��λ���ڱ��y�����λ����ͬ��܉�������������λ�_��-20 kV�������·�б�Ȼ��Ҫһ��ݔ����±20 kV ��“�ŷ��Ŵ���”���ܵ��|�����ʵ����ƣ��@�Dz����еġ�����SPM ���bNASA’sLewis Research Center ����늉�������(SurfaceVoltage Sensor)���OӋ���ȱ����˷����Б�ϵ�y�ă��c���ֲ���Ҫ��늉���ԓϵ�y���ýM��늘O��������늱���a����늈�������ͨ�^һ����늉�������̖�������p���㣬�ķ�����̖��ݔ���y��늉���̖����ԭ����D1 ��ʾ��
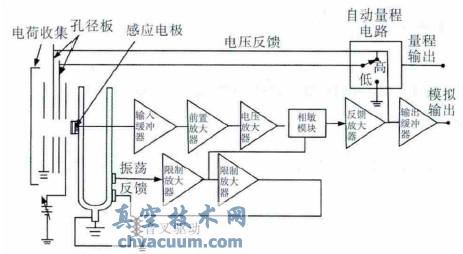
�D1 SPM ����ԭ��D
����SPM �Ĺ����^�̣��Б�늘O��늺��ռ���늈�����ʎ�a��λ�������������늈�������l�ʵ�����ʎ�l�ʡ��������̖���^�Ŵ�̎��֮��׃��늉���̖ݔ����ͬ�r���ɷ����·ʩ�ӵ��a��늘O�ϣ���늉��c늘O��늉��ڸБ�늘O̎�ϳ�늈����㡣һ��늈�׃���㣬�t�Б�������㣬�a��늘O��늉����㣬�t�Б�늘Oֻ̎��늺��ռ���늈��У��ٴγ��F�Б�������؏������^�̣����F����늉��Č��r�O�y��
����ͨ�^�O���m���Ď΅�����������늘O���a��늘O���Լ������g��ȣ�����ʹ늺��ռ���늉����a��늘O��늉���200 ��(������0 kV~2 kV)��2000 ��(������0 kV~20 kV)���Б�늘O̎��С늉��Ŵ�0 V~10 V ֮�gݔ����ͬ�r�����o�a��늘O��ݔ����늉���̖×200 ���ú����������λ���@�Ӿ��܌����m�·�ŷ��Ŵ�����ݔ����±20 kV ���͵�±10 V���Ķ������˺������ñ����λ�O�y�����|�����ġ�
����SPMs ̽�y�����Ը��Qǰ�����Ʒ���ϣ�ͨ�^���w��Q�^���h�ס�ݔ��늘O��ǰ������ρ팍�F��ǰ������ϰ��������H����Kapton��Kapton��Ϳ��늺��ᣬ���ᣬ̫�늳ء����α���ɢ���R�͑Ҹ����w(�����N)�ȣ��@��SPM �Ϳ�����܉�O�y���������N������ϵij����r��
����3���YՓ
���������U����������ʽ�����λ�O�y��SPM�����Б�ϵ�y���OӋԭ��������ͨ�^��ֵģ�MӋ��ķ�ʽՓ�C�Ď��OӋ�����c����FMDS �����������λ�O�y���ĵ��ͅ�������һ�£��C���҂���Ӌ��ģ������Ч�ģ����҇�����SPM ���OӋ�^���п������ڽY���OӋ�������xȡ�̓�����