ADSע��������՜y���c����ϵ�y����
�������������ADS ע��������՜y��ϵ�y�������P�O�����ϵ�y���OӋ��Ԕ���U���˜y������������߉���O��M�ɼ�ͨӍ�f�h��������PLC �y�T����������ģʽ���������̡��y���Ͳɼ����ϵ�y�Č��r��B������Ƥ���ᡢ��Ҏ��̖�IJɼ�����Ҏ늹��c0/1 ��̖�ɼ������ӱú��x�ӱõȵĠ�B��̖��
����ͨ�^����ϵ�y���H�\����r���l�F��늴ň����������Ҏ�Ĝy�����^��ĸɔ_����ˣ�������Ҫ�c��Ҏ��̖һ���i���Ƶ����ϵ�y���迼�]ԓ�ɔ_��ɵ�Ӱ푡����IJ��õ������ɂ���Ҏ��̖�i�ķ�������һ���̶��Ͽɱ��⏊늴ň���������̖�ɔ_�����ϵ�y���o��
����ADS(Accelerator Driven Sub-critical system)��ָ�������Ӵ��R��ϵ�y�����Լ������a���ĸ������|�����Z���к����U�ȣ��a��ɢ������������Դ�����Ӻ;S�ִ��R����\�У��ȿɴ�����ͺˏU�ϵķ�����Σ�����F�ˏU�ϵ����ٻ�̎�ã�ͬ�r߀������ݔ������ߺ��YԴ�������ʡ�
����ADS ע��������ADS ϵ�y��ǰ�μ��������֣����ó���ǻ���g�a��������׃ϵ�y������|�ӡ���Ҫ���x��Դ��RFQ��ݔ�\��MEBT��spoke ����ǻ������Ͱ�M�ɡ�������������OӋָ�˞飺
����* �x��Դ���ӑB��ն���1.3×10-3 Pa
����* ����ݔ�\�����ӑB��նȞ�1.3×10-3 Pa
����* RFQ���ӑB��նȞ�1×10-5 Pa
����* ����ݔ�\�����ӑB��նȞ�1×10-4 Pa
����* ����ǻ���ӑB��նȞ�1×10-7 Pa
����* �|�V������ϵ�y�ȟo��Ⱦ�E��
1����՜y���c����ϵ�y�M��
����1.1��Ӳ���M��
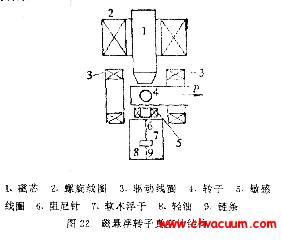
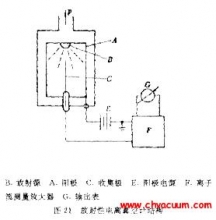
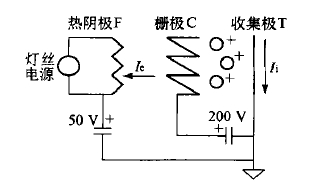
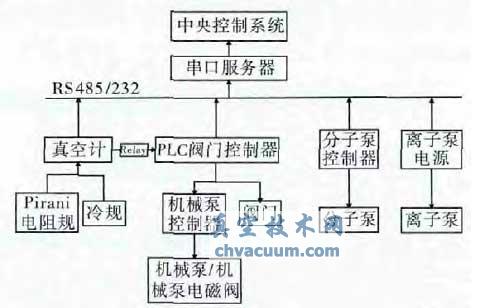
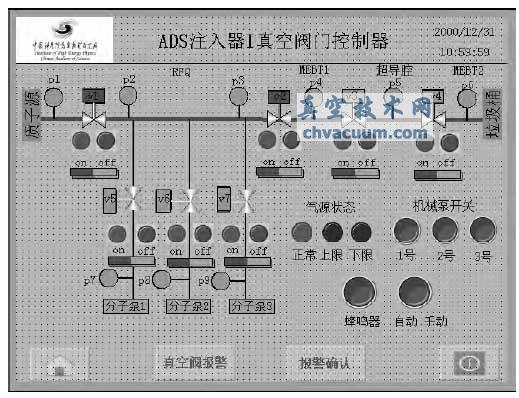
������D1 ADS ע��������ճ��ϵ�y���Cе�������ӱ����x�ӱá�늴Ś�Ӳ���y����������չܵ��M�ɡ�����RFQ �ξo�R�x��Դ��������������ݶȽӽ��ɂ�����������˲����˷��ӱÙC�M�c�x�ӱýM�ϳ��ķ�ʽ�����\���A���������H��r����ͬ�r�_���ɷN�ã�Ҳ��ͨ�^���ӱ���߅�IJ���y�����ӱÔ��_�����x�ӱÆΪ���⡣
�D1 ADS ע����I ���ϵ�yʾ��D
������՜y����Pirani ���Ҏ����Ҏ���ĘO�|�V�x�M�ɣ�Pirani ���Ҏ�y��������2.7×10-1~1.2×10+4 Pa����Ҏ�y��������2.7×10-8~6.5×10-1 Pa���ĘO�|�V�x�y���|�ɱ���1~100 ֮�g�Ě��w���ӡ��ڳ������A�H���әCе�ó�⣬��ն��^�ͣ��o��������Ҏ����Pirani ���Ҏ�y��ϵ�y��նȣ����Cе�Ì�ϵ�y��նȳ���1.0×10-1 Pa ���ң��@�r���ӷ��ӱá��@�Ӽȱ��C�˷��ӱõİ�ȫ���ӣ��ֿ�����Ҏ�o�����ӣ������y�T�������o���i�����y�T�r���C�y�T�ɶ˵ĉ����ɜy���������y�T���_�r�����y�T�ɶˉ����^����p���y�T��
�����O��������քe��Cе���Դ�����������ӱ��Դ���������x�ӱ��Դ��PLC �y�T��������937B ���Ӌ�����зǘ˼��Cе�ÿ��������y�T�������������OӋ��ɡ�
����1.2���y���c����߉�Y��
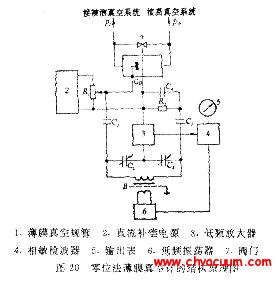
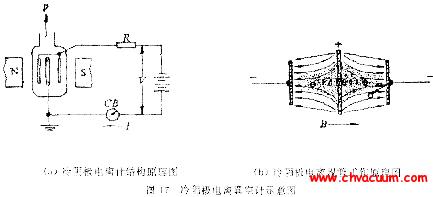
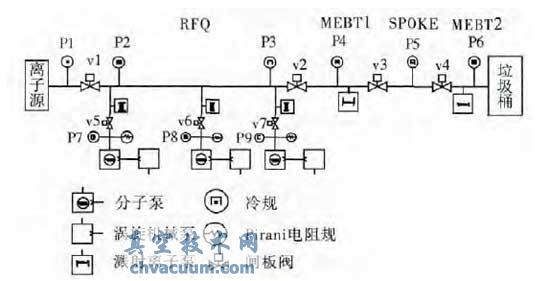
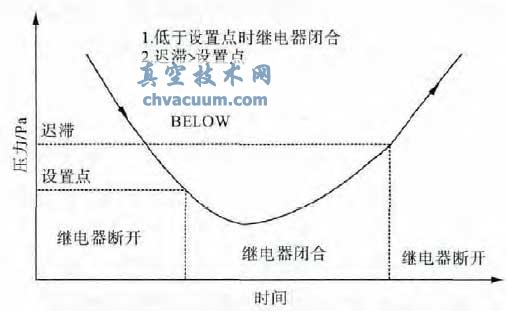
������D2 ��ʾ��ADS ע���������ϵ�y���ƽY���D�����Ӌ(MKS 937B)�ɼ�������Pirani ���Ҏ�c��Ҏ��������Ҏ��0/1 �^�����B�l�ͽoPLC�y�T��������ͬ�r�c�п��M��ͨӍ��������ע�����\�Еr��ֹ�����ˆT�M�����������Ԍ��Cе���h�̿��ơ�������Դ���������Դ�d�ṩ�������������ȡ늣����ϵ�y�Ŀɿ��ԡ��鹝ʡ�ɱ����Cе�ÿ����Դ��ܛ�����Ʋ��ּ�������PLC�y�T�������С�PLC �y�T������ͨ�^��Ҏ�^�����B��̖�Д����׃�����������_��Ӳ���y�������y�T�_�P��B�Լ���ՠ�Bͨ�^����RS485/232��ʽ�l�����пأ�����߉ԔҊ��2 ��������ϵ�yͨӍ�f�h�OӋ�飬�������������Ӌ��ͨ�^����RS485/232 �����B�l�������ڷ����������ڷ�����ͨ�^TCP/IP �f�h����������l�����пء�
�D2 ADS ע��������տ���ϵ�y�Y���D
����1.3�����Ӌ�^����|�l�c
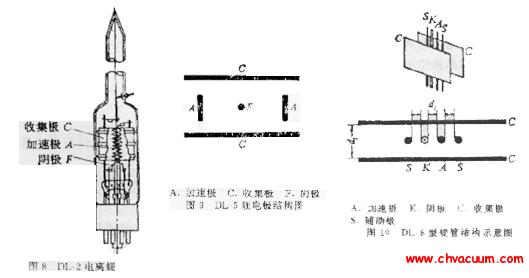
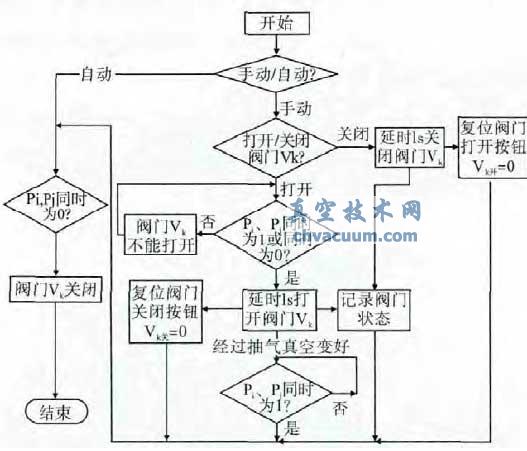
�������Ӌ�^����|�l�c���y�T�����������y�T�_�P����Ҫ��������D3 ���Ӌ�^���������B�x��‘BELOW’ģʽ����ϵ�y��������‘�O���c’�r�^����]�ϣ���ʾ���׃�ã���������‘�t��’�r�^������_����ʾ���׃����ӋĬ�J��‘�t��’����ֵ��1.2 ����‘�O���c’����ֵ�����߾����{�����Ӌ�^�����B�l�͵�PLC �y�T�������Á��Д��y�T�ɶ˵���ՠ�B�����B�i�����y�T�_�P��
�D3 ���Ӌ�^����|�c�����c�O������
2��PLC �y�T������
����2.1������߉
������D4 ��ʾ��PLC �y�T�������̈D��ԓϵ�y���ք��c�ԄӃɷN����ģʽ���Ԅ�ģʽ������������\�Еr������B���ք�ģʽ�¿����˞�������_���P�]�y�T�����Ԅ�ģʽ��ֻ���i�P�]�y�T���D4 ��Pi �cPj �քe��ʾ�y�TVk �����ɶ˵ăɂ����Ӌ��̖�����ք�ģʽ��Ҫ���_�y�TVk���tPi �cPj ���ͬ�r��1 ��ͬ�r��0�����C���y�TVk �ɶˉ���һ�£������y�T���^��ĉ����±����_���p�ġ��鱣�C���ϵ�y�İ�ȫ�ɿ��ԣ��������ķNģʽ�£�ֻҪ�y�TVk �ɶ�Pi �cPjͬ�r��0 �t�y�T�P�]�����׃��^�α����࣬���o�����^������Լ�����ӱõ�����O�����ڱ�¶��⡣
�D4 PLC �y�T�������������̈D
����2.2�����Ҏ�i�y�T�����c
�����y�T����ϵ�y�в��Ãɂ��������Ӌ�i�y�T�����c���£���һ�����C���_�y�T�r���y�T�ɶ˵ĉ���С���y�T���ܵĉ��������������y�T���әC�����p�����ڶ���ϵ�y�\���^���д����^����늴Ÿɔ_����Ҏ���ܵ��ɔ_���y��ֵ���ӡ��ɔ_��̖�����c���к��뼉�ķ�ֵ��ԓ��ֵ�����������Ӌ‘�O���c’�O����ֵ�����Æ����Ӌ��̖�i�y�T���������y�T�l���P�]�F���������ճ��������������ӣ������ɂ���Ҏ��̖�����F��ͬ�r׃���ĬF���ҕ����m����������犵ĕr�g�������̖�ɔ_�������������c���Hϵ�y���������������Ӆ^�e���@�����Բ��Ãɂ���Ҏ��̖�i���ںܴ�̶��ϱ�������̖�ɔ_��������Ӌ�^����`���������Cϵ�y�����\�С�
����2.3������ܛ��
����1.PLC ����
������D5 ���y�TV1 ��PLC ���Ƴ������ք�ģʽ�£����y�Tͬ�r��1 ��0 �r��ϵ�y�ӕr1s ���_�y�T�������y�T��B�����ڼĴ����С����˱��C�y�T�_�P�Ļ��i���˕r���P�]���o�Ĵ������Ə�λ��‘M_value2’ӛ��y�T�ɶ���ՠ�B��ü����Ӌ�^�����B��1��‘M_value1’ӛ��y�T�����_�r�Ġ�B���Ǵ_������ɺ�׃���@����B�r�y�T���P�]�������y�T���_�������Ȼ����Ӌ��̖����0 �r�y�T���P�]��
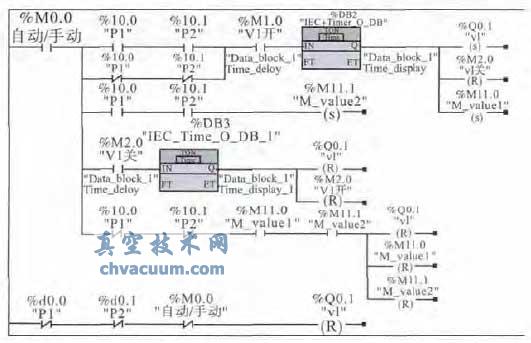
�D5 �y�TV1 PLC ���Ƴ���
����2.�|��������
������D6 ��ʾ��PLC �y�T�������|�������ƽ��棬Pi ��ʾ���Ӌ��B�����׃�Õr�@ʾ�Gɫ�����׃��r�@ʾ�tɫ��Vk ��ʾ�y�T�_�P��B����̖���y�T�������Gɫ��ʾ�y�T�_��B���tɫ��ʾ�y�T�P��B��‘on’��‘off’���o�Á����_���P�]�y�T���������ӕr���ܣ������`�������OӋ�ք�/ �ԄӃɷN����ģʽ���ɷNģʽ�ГQ�r��Ҫ�ܴa����ֹ�]�Й����ˆT�`������ֻ�����ք�ģʽ�²����ɹ����ˆT���_���P�]�y�T��
�D6 �y�T�������|��������
����2.4��ϵ�y���H�\�����ܷ���
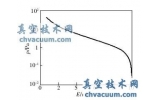
������D7 ��ʾ��RFQ �Ͼ��r����RFQ �ε���ն�׃���������tɫ������P3 �c����նȣ��{ɫ��P2 �c����նȡ���δ�ӹ��ʕr��ն�څ�ڷ�����B��ż���ж̕r�g���ӵĬF������ֵ�s��5×10-6 Pa���֏͕r�g�s��5 min������P2 ��P3 ͬ�r׃�����f����ϵ�y�Ś������ڼ��d���ʺ��S�����d���ʵĴ�С��ͬ��P2 ��P3 ֵ���F�r�g�g������뼉�Ą���׃���������׃���_3 ���������@�N��r�c���H����շŚ�����������^���f�����ڼ��d���ʵ���r�£�ϵ�y���ҵ�늴ň�׃��������Ҏ�Ȳ�������늣��������ɔ_�����Ĝy���`��@�N�`��o�y�T�i���������ϵ�y�����i������صĿ�����ϵ�y���o�l�����Ͼ��M�Ⱦ������ڌ��H�����Б���ҕԓ�F��İl�����Բ�ȡ������Ч�ķ�����ʩ��
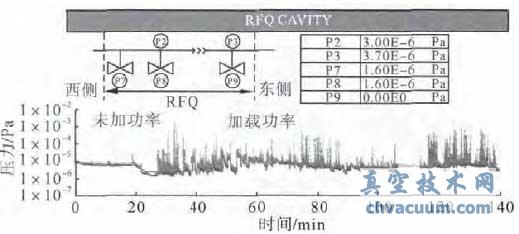
�D7 RFQ �Ͼ��A��ǻ���׃������
3���Y�Z
����ADS ע��������ɳ�����ǻ��MEBT2������Ͱ��İ��b�{ԇ�����������Ͼ��\��һ�����¡���տ���ϵ�yδ�l�������c߉�e�`��PLC �y�T�������ڸ��N���r�¹����������ܿɿ��P�]�y�T����Ҏ�ڏ�늴ň��ĭh���й��������ɱ���ĕ��ܵ���̖�ɔ_����ˣ��c��Ҏ��̖һ���i���Ƶ�ϵ�y���迼�]ԓ��̖�ɔ_������Ӱ푡����IJ��õăɂ���Ҏ��̖�i�ķ�����һ���̶��Ͽɱ����@�N�ɔ_������ϵ�y���o��