����Pro/E��ADAMS�IJ��M�C���ķ���
�������M�C��ͨ�^���ֵ����͔[�ӎ������N, �����N���Ӱ�, �����Ӱ��ϵĿ��ƗU֮�gĦ��, ���F���i, �Ķ����ƗU���F���M�\�ӡ�����Ħ�����Լ�ȫ�s���������D����ԓ�C���P�I�����M�������, �\��Pro/ E �������\�әC��3D ģ��, ����ADAMS ܛ���M��ԓ�C�����\�ӌW�̈́����W����, ����m���OӋ�������ṩ��һ������Փ������
��������
����̓�M�әC���g����ʹ�����OӋ�ˆT��̓�M�h����ģ�M�aƷ�P�I�C�����\�ӌW�������W����, ���ٷ�����ԓ�C�����\���Լ�������r, ���ҿ��Ԍ�����әC�o���M�Мyԇ��һЩ�P�I�����M��ģ�M����, ֱ���@����aƷ��ֹ��̓�M�әC��������әCԇ�, ���Խ����OӋ�ɱ�������OӋ�|����
�����҂�ͨ�^����Ħ�����Լ�ȫ�s���������D����ⲽ�M�C���P�I����, �����P�I����ͨ�^Pro/ E ����3Dģ��, Ȼ����ADAMS ���M���\�ӌW�̈́����W�ķ��������
1�����M�C������ԭ�����P�I�����_�J
����1.1������ԭ����B
�����ĈD1 ��ʾ�IJ��M�C��ԭ��D��֪, �˙C���\��ԭ������:
����������8 �[�ӕr, ���־͕������ڙC��9 ���D, ����8 �ϵ����N5 �͕����Ӱ�4, ֱ���Ӱ�4 �Ͽ��c�ƗU2 ������|��Ħ�����i��, �͕�ֱ�����ƗU2 �����������M�\��, ֱ������8 ��Ȃ��D�ӽY��, �@�r�ƗU2 ֹͣ��ǰ�\��, ���_����8, �����Ӱ剺��3 ���i�o�剺��6 ��������, ����8���Ӱ�4���i�o��7 �͕��֏͵����r��B, �@�r�i�o��7 �Ͽͺ��ƗU2 �������|��Ħ�����i, ���F�ƗU2 ���i��( �ƗU2 �o������\��, ���C�ƗU2 ���M���B�m��) , �����Ҫ�ƗU2 �܉�����\��, ����Ҫ���_�i�o��7��
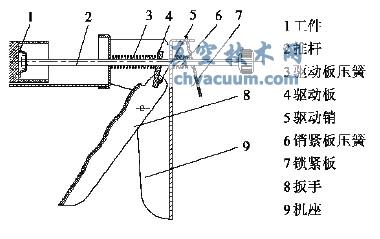
�D1 ���M�C��ԭ��D
����1.2���P�I�����Ĵ_�J
����1.2.1���ӽY�����P�����_��
����(1) �����x�˙C�����е���������x��:Q235 ) A, ���w����: ����䓲�����^��ͨ�IJ��|, �ɱ���, �Cе���ܻ������ԝM��F�C����Ҫ��; �˲��ϵ�Ħ����������������Ҫ��һ�c, �������FĦ�����i��
����(2) ���M�C�������ߴ�Ĵ_�����D2 �鲽�M�C���ą����D, ͨ�^����JM) 109 ���M�C���ą���, ���w��ֵ����: �ƗUֱ��d1 = 4 mm; �Ӱ��ֱ��D1 = 4. 5mm; �Ӱ�ں�t1= 3 mm; �i�o���ֱ��D2= 4. 5 mm;�i�o��ں�t 2= 1. 5 mm; ���M���xL1= 10 mm; �����D�S��λ��: L0x = 20 mm, L0y = 31 mm; ���Nֱ��d2= 3 mm; �����ϲ����D�Ӱ돽r , ��Ҫͨ�^����Ӌ��ſ��Դ_���������ֵ�r, ���܉��C���������M�\����, �Ӱ���ƗU������|��Ħ�����i; �ƗU���Ӱ�ס��ƗU���i�o���֮�g���oĦ����f s = 0. 2��
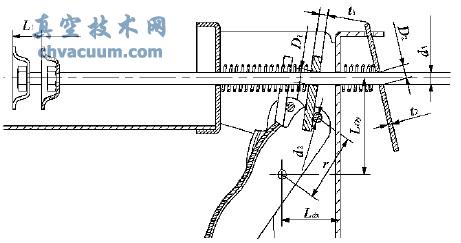
�D2 ���M�C�������D
4���YՓ
����ͨ�^����Ħ�����Լ�ȫ�s�������D����ⲽ�M�C���܉F���M�\�ӵ��P�I����, �����@Щ����ͨ�^Pro/ E ����3D ģ��, ����ADAMS ܛ���M�з������,ͨ�^����������Եõ��ƗU��λ�ơ��ٶȡ����ٶ������Լ��ƗU���Ӱ�֮�g���|������, �����ڰl�Fģ���еĆ��}�Լ����沿������әC�����Pԇ�, �s���_�l����, ��߹���Ч�ʡ�
���������еķ����Ǜ]�п��]������ȡ��b���`������׃�ε����ص�Ӱ�, ������]�@Щ����, �������҂�����Ħ�����Լ�ȫ�s�������D���������P�I����������׃��, �Լ�ADAMS ����������λ�ơ��ٶȡ����ٶȺͽ��|��Ҳ��������׃��, ���w׃����ֵ, �д����m�����ȥ�о���